тараканов или пауков никогда не рассматривали ?
не задумывались, почему природа прикрепила им ноги практически в геометрическом центре тела ?
| |
roboforum.ruТехнический форум по робототехнике. |
|
Хексапод (Hexapod) - как минимизировать - собираем идеи :)
Re: Хексапод - как минимизировать - собираем идеи :)
![]() nest » 21 июн 2009, 02:47
nest » 21 июн 2009, 02:47
-

nest - Сообщения: 977
- Зарегистрирован: 21 янв 2005, 12:16
- Откуда: Germany
- Предупреждения: -4
- прог. языки: asm
Re: Хексапод - как минимизировать - собираем идеи :)
![]() =DeaD= » 21 июн 2009, 10:44
=DeaD= » 21 июн 2009, 10:44
Что за мода пошла говорить загадками? У avr123 научились? 
Ну даже если это эффективней - не факт что мы сможем сделать такой же конструктив, как и природа.
Добавлено спустя 39 минут 39 секунд:
А вот этот зарядник сильно хуже?
Как эконом версия может быть использован?
Добавлено спустя 15 минут 48 секунд:
Похоже что сильно хуже судя по отзывам
Просто что-то много всего получается - аккум + зарядка + адаптер к ней + конвертер до 6В. Хотя-бы зарядку с конвертером сразу что-ли... или понять, какие там где разъемы.
Ну даже если это эффективней - не факт что мы сможем сделать такой же конструктив, как и природа.
Добавлено спустя 39 минут 39 секунд:
milkpower писал(а):яб посоветовал
ну а для 3банок достаточно будет
http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=7898&Product_Name=Turnigy_420_Balancer/Charger_2S~4S
А вот этот зарядник сильно хуже?
Как эконом версия может быть использован?
Добавлено спустя 15 минут 48 секунд:
Похоже что сильно хуже судя по отзывам
Просто что-то много всего получается - аккум + зарядка + адаптер к ней + конвертер до 6В. Хотя-бы зарядку с конвертером сразу что-ли... или понять, какие там где разъемы.
-

=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Хексапод - как минимизировать - собираем идеи :)
![]() milkpower » 21 июн 2009, 10:53
milkpower » 21 июн 2009, 10:53
ну первое то, что он заряжает до 800мАч и акб емкостью 1600 он будет заряжать часа 4, а-то и больше. и меня очень смущает качество балансира если зарядник стоит 4.50$. просто если банки будут разъезжаться по напряжению, то аккум долго не проживет, а учитывая то что и акб китайское  , то совсем не надолго.
, то совсем не надолго.
на опыте убедился, что зарядка вещь серьезная для акб. у меня банки NiMg 3300мАч живут уже лет 6 в машинке, и емкость осталась примерно на 80%.
http://www.duratrax.com/caraccys/dtxp4170.html на башне стоит 120$.
, то совсем не надолго.на опыте убедился, что зарядка вещь серьезная для акб. у меня банки NiMg 3300мАч живут уже лет 6 в машинке, и емкость осталась примерно на 80%.
http://www.duratrax.com/caraccys/dtxp4170.html на башне стоит 120$.
-

milkpower - Сообщения: 217
- Зарегистрирован: 25 мар 2009, 13:57
- Откуда: Ростов-на-Дону
- ФИО: Виктор
Re: Хексапод - как минимизировать - собираем идеи :)
![]() =DeaD= » 21 июн 2009, 11:05
=DeaD= » 21 июн 2009, 11:05
Ок, понял, не экономим на спичках
Добавлено спустя 1 минуту 43 секунды:
А еще вот такой как эконом вариант пойдёт?
Добавлено спустя 4 минуты 53 секунды:
Еще вот недорогой зарядник:
А про батареи недолго живущие - так вполне может оказаться, что роботы вообще меньше используются, чем р/у игрушки - их же обычно программируют, что-то еще с ними делают. Тот же шестиног на HXT900 вряд ли очень долго проживёт.
Добавлено спустя 1 минуту 43 секунды:
А еще вот такой как эконом вариант пойдёт?
Добавлено спустя 4 минуты 53 секунды:
Еще вот недорогой зарядник:
А про батареи недолго живущие - так вполне может оказаться, что роботы вообще меньше используются, чем р/у игрушки - их же обычно программируют, что-то еще с ними делают. Тот же шестиног на HXT900 вряд ли очень долго проживёт.
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Хексапод - как минимизировать - собираем идеи :)
![]() milkpower » 21 июн 2009, 11:42
milkpower » 21 июн 2009, 11:42
первый по ссылкам вообще шлак, еще хуже. там Output: 650mA per cell
ну а второй написано до 1.2А, но сталкивался с похожими других фирм, там 1.2А не пахло.
я всетаки склоняюсь из тех что есть за приемлимую цену то
http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=7898&Product_Name=Turnigy_420_Balancer/Charger_2S~4S
либо чуть дороже но при этом мы имеем зарядку и для гидрида и для свинца и для лайфов(А123) которые сейчас развиваются и думаю нам они будут удобнее (3.3V банка), да и зарядка вобщем-то идеальна в своей цене (до50$)
http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=7373&Product_Name=Turnigy_Accucel-6_50W_5A_Bal/Chrg_(USA_Warehouse)
и еще крайне посоветовал бы индикатор для полимеров, потому как нестоит их разряжать меньше 3V/банка, спасет думаю нераз.
http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=6260&Product_Name=Turnigy_Li-Po_Power_Indicator_3S_&_4S
ну а второй написано до 1.2А, но сталкивался с похожими других фирм, там 1.2А не пахло.
я всетаки склоняюсь из тех что есть за приемлимую цену то
http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=7898&Product_Name=Turnigy_420_Balancer/Charger_2S~4S
либо чуть дороже но при этом мы имеем зарядку и для гидрида и для свинца и для лайфов(А123) которые сейчас развиваются и думаю нам они будут удобнее (3.3V банка), да и зарядка вобщем-то идеальна в своей цене (до50$)
http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=7373&Product_Name=Turnigy_Accucel-6_50W_5A_Bal/Chrg_(USA_Warehouse)
и еще крайне посоветовал бы индикатор для полимеров, потому как нестоит их разряжать меньше 3V/банка, спасет думаю нераз.
http://www.hobbycity.com/hobbycity/store/uh_viewItem.asp?idProduct=6260&Product_Name=Turnigy_Li-Po_Power_Indicator_3S_&_4S
-
milkpower - Сообщения: 217
- Зарегистрирован: 25 мар 2009, 13:57
- Откуда: Ростов-на-Дону
- ФИО: Виктор
Re: Хексапод - как минимизировать - собираем идеи :)
![]() =DeaD= » 21 июн 2009, 11:48
=DeaD= » 21 июн 2009, 11:48
И то и другое отсутствует сейчас у них 
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Хексапод - как минимизировать - собираем идеи :)
![]() nest » 21 июн 2009, 11:54
nest » 21 июн 2009, 11:54
=DeaD= писал(а):Что за мода пошла говорить загадками?
да это реально выпрос был.
но, видать, никто об этом не думал.
-
nest - Сообщения: 977
- Зарегистрирован: 21 янв 2005, 12:16
- Откуда: Germany
- Предупреждения: -4
- прог. языки: asm
Re: Хексапод - как минимизировать - собираем идеи :)
![]() =DeaD= » 21 июн 2009, 12:05
=DeaD= » 21 июн 2009, 12:05
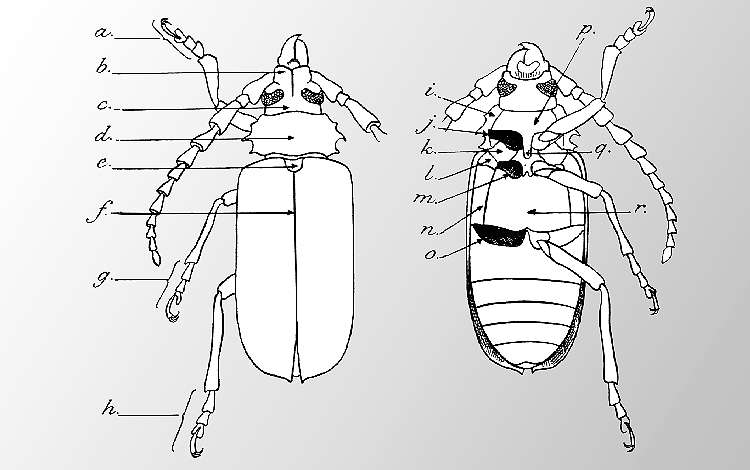
Тогда сорри, я тут попытался найти картинки жуков сфотканных снизу, чтобы рассмотреть как у них лапы устроены и не нашел
Только пару-тройку картинок, из которых на 1 как раз не в центре ноги
Только пару-тройку картинок, из которых на 1 как раз не в центре ноги
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Хексапод - как минимизировать - собираем идеи :)
![]() milkpower » 21 июн 2009, 12:16
milkpower » 21 июн 2009, 12:16
- 23465283_orig.jpg (54.2 КиБ) Просмотров: 3235
тут вобщем-то не из центра, но если проводить линию по ноге, то все, практически, сходятся в центре.
а всякие креведки/ракообразные, многие жуки, у них да, действительно все конечности из центра ростут. Но в реализации с сервами такое мне кажется практически не реализуемо
-
milkpower - Сообщения: 217
- Зарегистрирован: 25 мар 2009, 13:57
- Откуда: Ростов-на-Дону
- ФИО: Виктор
Re: Хексапод - как минимизировать - собираем идеи :)
![]() =DeaD= » 21 июн 2009, 12:28
=DeaD= » 21 июн 2009, 12:28
Понятно что продолжение ног должно сходиться в центре - тупо чтобы при ходьбе ноги меньше всего друг другу мешали надо чтобы у каждой ноги был примерно равный сектор движения.
Добавлено спустя 34 секунды:
Но речь то шла именно о точке крепления ноги к туловищу. Вот тут мне и не ясно с чего бы им в центре всем быть.
Добавлено спустя 34 секунды:
Но речь то шла именно о точке крепления ноги к туловищу. Вот тут мне и не ясно с чего бы им в центре всем быть.
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Хексапод - как минимизировать - собираем идеи :)
![]() nest » 21 июн 2009, 12:47
nest » 21 июн 2009, 12:47
они крепятся в основном в центре. на приведённых картинках не видно.
вот вид снизу:
http://molbiol.ru/forums/uploads/post-15358-1160055627_thumb.jpg
http://www.zin.ru/ANIMALIA/COLEOPTERA/images/coleop2.jpg

вот вид снизу:
http://molbiol.ru/forums/uploads/post-15358-1160055627_thumb.jpg
{kind=link}
http://www.zin.ru/ANIMALIA/COLEOPTERA/images/coleop2.jpg
{kind=link}
Последний раз редактировалось nest 21 июн 2009, 13:04, всего редактировалось 1 раз.
-
nest - Сообщения: 977
- Зарегистрирован: 21 янв 2005, 12:16
- Откуда: Germany
- Предупреждения: -4
- прог. языки: asm
Re: Хексапод - как минимизировать - собираем идеи :)
![]() =DeaD= » 21 июн 2009, 12:56
=DeaD= » 21 июн 2009, 12:56
Это не в центре, это по окружности, а к брюху может просто неэффективно, т.к. к ногам же надо еще питание подводить. Вообще надо вспомнить как у насекомых там всё работает, там же вроде совсем уже не мышцы.
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Хексапод - как минимизировать - собираем идеи :)
![]() nest » 21 июн 2009, 13:11
nest » 21 июн 2009, 13:11
да не по окружности, а именно в центре. или по оси, если тело длинное.
может, это так для того, что бы разворачиваться с наименьшей затратой.
т.к. для поворота на какой то угол, ногами, прикреплёнными в центре нужно намного меньшее количество движений.
сами себе представьте: сколько раз надо перебрать ногами по периметру прикреплёнными, что бы повернуться на 90 градусов.
а если по центру - три-четыре-пять движений - и уже бежим в другую сторону.
собственно. это моё ИМХО. ноги должны быть в центре. хоть это и технически/механически сложнее изготовить/управлять.
может, это так для того, что бы разворачиваться с наименьшей затратой.
т.к. для поворота на какой то угол, ногами, прикреплёнными в центре нужно намного меньшее количество движений.
сами себе представьте: сколько раз надо перебрать ногами по периметру прикреплёнными, что бы повернуться на 90 градусов.
а если по центру - три-четыре-пять движений - и уже бежим в другую сторону.
собственно. это моё ИМХО. ноги должны быть в центре. хоть это и технически/механически сложнее изготовить/управлять.
спорный вопрос. точки крепления можно расположить для всех ног в одной точке, а двигать - в другой. ну ... как то так.milkpower писал(а):в реализации с сервами такое мне кажется практически не реализуемо
Последний раз редактировалось nest 21 июн 2009, 15:46, всего редактировалось 1 раз.
-
nest - Сообщения: 977
- Зарегистрирован: 21 янв 2005, 12:16
- Откуда: Germany
- Предупреждения: -4
- прог. языки: asm
Re: Хексапод - как минимизировать - собираем идеи :)
![]() milkpower » 21 июн 2009, 14:14
milkpower » 21 июн 2009, 14:14
мне кажется, что примерно в таком исполнении мы практически имеем теже способности в проворности, но выигрываем в упрощении крепления ног.
-
milkpower - Сообщения: 217
- Зарегистрирован: 25 мар 2009, 13:57
- Откуда: Ростов-на-Дону
- ФИО: Виктор
Re: Хексапод - как минимизировать - собираем идеи :)
![]() Master » 21 июн 2009, 14:28
Master » 21 июн 2009, 14:28
ИМХО при таком креплении ног матмадель усложняется в разы, с другой стороны у нашего робота нет головы и живота, поэтому можно ноги разместить вообще по окружности, тогда он сможет без разворота туловища двигаться в любую стороны, а это уже большой плюс.
-

Master - Сообщения: 4468
- Зарегистрирован: 21 дек 2006, 19:56
- Откуда: Украина, г.Одесса
- прог. языки: Delphi и С
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 2