
roboforum.ru
Технический форум по робототехнике.
Автономная навигация робота
Правила форума
В этом форуме новые темы не создаются, однако обсуждение допустимо.
В этом форуме новые темы не создаются, однако обсуждение допустимо.
Re: Автономная навигация робота
Сегодня 4 мая 2011 года состоялся официальный релиз AVM Navigator v0.7 plugin на вебсайте RoboRealm
Re: Автономная навигация робота
Принимай поздравления! 
Re: Автономная навигация робота
Спасибо 
Но всё самое интересное ещё впереди...
Думаю, машины таки прозреют, и может даже мы ещё доживём до этих славных времён
Но всё самое интересное ещё впереди...
Думаю, машины таки прозреют, и может даже мы ещё доживём до этих славных времён
Re: Автономная навигация робота
Вопрос по алгоритму, а как он среагирует если предметы в комнате переместятся? Например стулья, это помеха, но они постоянно перемещаются.
Re: Автономная навигация робота
Могу предположить, что комната большая, и кроме стульев там есть много других предметов, которые останутся на своих местах, так что распознается какое-то количество маяков, которые были закреплены за этими «не переставленными» вещами. И тогда робот всё равно узнает своё текущее местоположение на карте, а новые (не распознанные) стулья будут внесены в карту, так как запись в AVM происходит даже в режиме “Navigate by map”.
Re: Автономная навигация робота
Я так понимаю, что в этом режиме алгоритм не просто тупо запоминает картинку перед собой, а ищет какие-то визуальные ориентиры. Вертикальные линии, например. Причем все время пополняет их в процессе движения. Иначе бы, при перестановке мебели, узнаваемая картинка бы точно потерялась. Так?
Re: Автономная навигация робота
Я уже как-то писал об этом в другой ветке:
Могу ещё добавить, что при включении режимов “Marker mode” или “Navigate by map” происходит начальная локализация (по включению режима на экране отображается прогресс, а робот вращает камерой по сторонам). В момент начальной локализации запись в AVM не происходит, а робот как бы оглядываясь, пытается распознать ранее записанные образы и понять в какой точке карты он находится. По завершению начальной локализации индикатор текущего положения устанавливается в соответствующую позицию на карте, и включается запись новых картинок в AVM (робот готов к дальнейшей работе: разведке/навигации).
Новые картинки записываются в AVM не только в режиме “Marker mode” но и в “Navigate by map”. Так что да, информация в карте постоянно обновляется.
Для повышения точности нужна статистика по нескольким маркерам (маякам) в кадре.
В навигаторе робот чаще всего видит одновременно несколько маяков (чем больше – тем лучше). Эти маяки составляют как бы «рой» координат и азимутов (кластер), алгоритм находит значение кластера (вокруг какого значения «роятся» x, y координаты, а так же значение угла-азимута) и определяет своё местоположение на карте.
Так что в одном снимке робот видит одновременно несколько маркеров-ориентиров (на видео маркеры индицируются тонкими красными прямоугольниками).
Могу ещё добавить, что при включении режимов “Marker mode” или “Navigate by map” происходит начальная локализация (по включению режима на экране отображается прогресс, а робот вращает камерой по сторонам). В момент начальной локализации запись в AVM не происходит, а робот как бы оглядываясь, пытается распознать ранее записанные образы и понять в какой точке карты он находится. По завершению начальной локализации индикатор текущего положения устанавливается в соответствующую позицию на карте, и включается запись новых картинок в AVM (робот готов к дальнейшей работе: разведке/навигации).
Новые картинки записываются в AVM не только в режиме “Marker mode” но и в “Navigate by map”. Так что да, информация в карте постоянно обновляется.
Re: Автономная навигация робота
Так я вот как раз и хотел узнать, как эти маркеры-ориентиры выбираются. Просто берется квадратик картинки в центре, потом постепенно расширяется, или из картинки выбираются какие-то значимые области и запоминаются только они?
Re: Автономная навигация робота
Запоминается центральная часть экрана, 72% от общего размера изображения.
Re: Автономная навигация робота
Понятно. То есть при движении периодически делается снимок центра экрана и заносится в базу, как маяк. А "рой" получается за счет того, что одновременно присутствуют маяки-картинки на разном удалении от робота, маяки с низкой достоверностью отсекаются, а для остальных считается усредненное смещение координат центра?
Re: Автономная навигация робота
Нет, усреднение – это зло, в данном случае.
Вот, к примеру, измеряем мы какой-то физический параметр (к примеру частоту), и наши измерения «зашумлены», тогда фактическое значение параметра можно найти по такому вот нехитрому алгоритму:
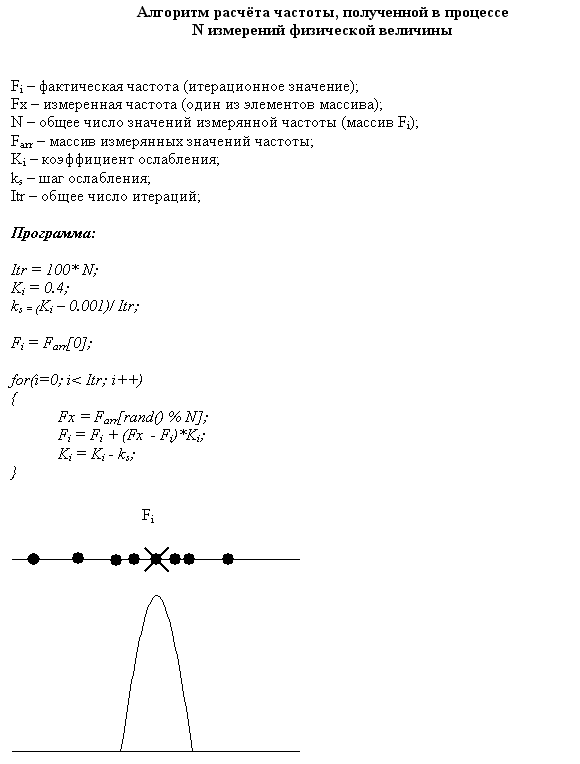
Вот, к примеру, измеряем мы какой-то физический параметр (к примеру частоту), и наши измерения «зашумлены», тогда фактическое значение параметра можно найти по такому вот нехитрому алгоритму:
- Вложения
-
Re: Автономная навигация робота
О как! Все круче оказывается. Больше всего удивляет, что все это действительно работает.
Re: Автономная навигация робота
2EDV:
Не понял, а чем этот алгоритм принципиально отличается от усреднения?
Вроде с точки зрения матожидания он должен выдать ровно арифметическое среднее?
К тому же он вычислительно более тяжелый.
Можешь запустить проверку - получится у него на выходе арифметическое среднее по матожиданию или нет?
Не понял, а чем этот алгоритм принципиально отличается от усреднения?
Вроде с точки зрения матожидания он должен выдать ровно арифметическое среднее?
К тому же он вычислительно более тяжелый.
Можешь запустить проверку - получится у него на выходе арифметическое среднее по матожиданию или нет?
Re: Автономная навигация робота
=DeaD= писал(а):Вроде с точки зрения матожидания он должен выдать ровно арифметическое среднее?
Тоже так кажется.