
| |
roboforum.ruТехнический форум по робототехнике. |
|
Павуки (и не только) из разогнутых скрепок и прочего хлама..
Правила форума
В этом форуме новые темы не создаются, однако обсуждение допустимо.
В этом форуме новые темы не создаются, однако обсуждение допустимо.
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() MegaBIZON » 16 янв 2013, 08:20
MegaBIZON » 16 янв 2013, 08:20
ну да, Michael_K с мудрым видом Сарумана и рассуждал тада обо всём. Вот его и на допрос
-

MegaBIZON - Сообщения: 6285
- Зарегистрирован: 12 янв 2007, 00:34
- Откуда: Масква
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() Radist » 16 янв 2013, 10:01
Radist » 16 янв 2013, 10:01
Он давно на форуме не появлялся, так что вся надежда на тебя. И там твоей рукой написано, что ты понял что к чему. У меня пока конкретный вопрос: как коряга (которая параллельно полу и похожа на знак мерседеса) двигается мотором и по какой траектории? От ее движения ноги движутся и вверх/вниз, и вперед/назад. То есть она заставляет робота ходить.
-

Radist - Сообщения: 2254
- Зарегистрирован: 01 июл 2009, 08:59
- Откуда: Екатеринбург
- прог. языки: асемблер AVR
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() Michael_K » 16 янв 2013, 13:45
Michael_K » 16 янв 2013, 13:45
-

Michael_K - Сообщения: 6028
- Зарегистрирован: 07 окт 2009, 00:29
- Откуда: СПб
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() Radist » 16 янв 2013, 14:02
Radist » 16 янв 2013, 14:02
Это не спортивно. Когда есть готовый красивый робот, то рука не поднимется его сломать; свой делать уже не захочется. Михаил, может вы проясните? У меня всего пара конкретных вопросов. Сперва первый из них.
Коряга имеет 3 луча - они идут к ноге снизу (нижняя часть параллелограмма).
Между лучами растут пеньки - они идут к верхней части параллелограмма других ног.
У коряги есть вертикальный ствол.
Теперь вопрос: как именно движется коряга кривошипом? Вроде вверх/вниз - это движение подъема/опускания ног. А как еще? Чтоб робот шагал. От чего зависит в какую сторону робот пойдет? Пока вот такой вопрос. Ваши поясняющие картинки я смотрел, дополнительно нашел ролик на предыдущей странице, но ясности нет.
Коряга имеет 3 луча - они идут к ноге снизу (нижняя часть параллелограмма).
Между лучами растут пеньки - они идут к верхней части параллелограмма других ног.
У коряги есть вертикальный ствол.
Теперь вопрос: как именно движется коряга кривошипом? Вроде вверх/вниз - это движение подъема/опускания ног. А как еще? Чтоб робот шагал. От чего зависит в какую сторону робот пойдет? Пока вот такой вопрос. Ваши поясняющие картинки я смотрел, дополнительно нашел ролик на предыдущей странице, но ясности нет.
-
Radist - Сообщения: 2254
- Зарегистрирован: 01 июл 2009, 08:59
- Откуда: Екатеринбург
- прог. языки: асемблер AVR
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() Michael_K » 16 янв 2013, 14:15
Michael_K » 16 янв 2013, 14:15
Просто "честная" кинематика получается довольно сложной.
А в живом китайском паучке все, скорее всего, работает на люфтах, детальки ездят в пазах и т.п.
Ось кривошипа расположена горизонтально. "Ходовой" мотор крутит кривошип.
Соответственно кривошип двигает корягу по кругу (вверх-влево-вниз-вправо, например, чтобы паук шел вбок).
"Поворотный" мотор вращает сам кривошип (возможно, вместе с "ходовым" мотором) вокруг вертикальной оси.
(UPD: все моторы в шапке этого паука - шапка вся целиком вращается относительно брюха)
Например, можно повернуть кривошип так, чтобы он двигал корягу вверх-от нас-вниз-на нас и робот пойдет вперед (или назад).
Там на видео неплохо видно, кстати.
В "честной" жесткой кинематике нужно много шарниров-карданчиков, но там, скорее всего, просто оси немного гуляют в дырках (или как-то так) - углы-то небольшие.
А в живом китайском паучке все, скорее всего, работает на люфтах, детальки ездят в пазах и т.п.
Ось кривошипа расположена горизонтально. "Ходовой" мотор крутит кривошип.
Соответственно кривошип двигает корягу по кругу (вверх-влево-вниз-вправо, например, чтобы паук шел вбок).
"Поворотный" мотор вращает сам кривошип (
(UPD: все моторы в шапке этого паука - шапка вся целиком вращается относительно брюха)
Например, можно повернуть кривошип так, чтобы он двигал корягу вверх-от нас-вниз-на нас и робот пойдет вперед (или назад).
Там на видео неплохо видно, кстати.
В "честной" жесткой кинематике нужно много шарниров-карданчиков, но там, скорее всего, просто оси немного гуляют в дырках (или как-то так) - углы-то небольшие.
-
Michael_K - Сообщения: 6028
- Зарегистрирован: 07 окт 2009, 00:29
- Откуда: СПб
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() Radist » 16 янв 2013, 14:39
Radist » 16 янв 2013, 14:39
Мне кажется, что я все понял. Для проверки расскажу как понял, чтоб получить подтверждение.
Итак, ходовой мотор с кривошипом стоит горизонтально. На кривошипе висит ствол коряги, к концу ствола жестко прикреплена коряга. При вращении кривошипа нижний конец ствола вместе с корягой описывают окружность в вертикальной плоскости, при этом коряга не только ходит вверх/вниз, но еще и перекашивается (становится чуть не параллельной полу). Робот идет вбок относительно направления кривошипа. Чтобы пойти в другую сторону - надо чтобы кривошип втыкался в ствол с другой стороны. Отсюда вытекает, что верхняя часть ствола вращается относительно нижней части ствола. Второй мотор крутит первый мотор в горизонтальной плоскости - робот идет в другую сторону. Верно я понял?
Итак, ходовой мотор с кривошипом стоит горизонтально. На кривошипе висит ствол коряги, к концу ствола жестко прикреплена коряга. При вращении кривошипа нижний конец ствола вместе с корягой описывают окружность в вертикальной плоскости, при этом коряга не только ходит вверх/вниз, но еще и перекашивается (становится чуть не параллельной полу). Робот идет вбок относительно направления кривошипа. Чтобы пойти в другую сторону - надо чтобы кривошип втыкался в ствол с другой стороны. Отсюда вытекает, что верхняя часть ствола вращается относительно нижней части ствола. Второй мотор крутит первый мотор в горизонтальной плоскости - робот идет в другую сторону. Верно я понял?
-
Radist - Сообщения: 2254
- Зарегистрирован: 01 июл 2009, 08:59
- Откуда: Екатеринбург
- прог. языки: асемблер AVR
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() Michael_K » 16 янв 2013, 16:21
Michael_K » 16 янв 2013, 16:21
Ага.
Ну как-то так, да.
По идее, коряга не должна (не обязана) перекашиваться. Она же может и плоскопараллельно по кругу ходить...
Как в этом конкретном паучке сделано - не знаю.
Добавлено спустя 6 минут 40 секунд:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
Проще всего, по-моему, ее все-таки перекосить, но постараться свести все рычаги от ног в одну точку.
То есть не делать "корягу" слишком уж коряжистой. Похоже, что в этом паучке так и сделано.
Добавлено спустя 50 минут 41 секунду:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
А, нееет. Все-таки там сделано без перекосов:
Добавлено спустя 3 минуты 3 секунды:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
Все проще, чем я думал - ноги в пазах ездят...
Ну как-то так, да.
По идее, коряга не должна (не обязана) перекашиваться. Она же может и плоскопараллельно по кругу ходить...
Как в этом конкретном паучке сделано - не знаю.
Добавлено спустя 6 минут 40 секунд:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
Проще всего, по-моему, ее все-таки перекосить, но постараться свести все рычаги от ног в одну точку.
То есть не делать "корягу" слишком уж коряжистой. Похоже, что в этом паучке так и сделано.
Добавлено спустя 50 минут 41 секунду:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
А, нееет. Все-таки там сделано без перекосов:
Добавлено спустя 3 минуты 3 секунды:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
Все проще, чем я думал - ноги в пазах ездят...
- Вложения
-
-
Michael_K - Сообщения: 6028
- Зарегистрирован: 07 окт 2009, 00:29
- Откуда: СПб
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() Dmitry__ » 16 янв 2013, 18:54
Dmitry__ » 16 янв 2013, 18:54
Классный спайдер. А давайте разработаем цифровую модель? Избранным могу выпилить на чпу из стеклотекстолита. Если по люфтам и точности пойдет лазерная резка пластика, то колич. копий вообще безгранично. Или это не спортивно?
Во, усы можно сделать из скрепок
Во, усы можно сделать из скрепок
-

Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() Vovan » 16 янв 2013, 19:16
Vovan » 16 янв 2013, 19:16
Принцип работы конечно одинаков на последнем рисунке и на видео. Однако на рисунке шаровые шарниры и пазы, а который на видео ни того, ни другого по-моему не имеет...
Ваще я слабо представляю как такое можно из скрепок соорудить Если всё же такое появится в этой ветке - это будет совершенно новый вид
Если всё же такое появится в этой ветке - это будет совершенно новый вид
Radist неужто замахнулся?
Ваще я слабо представляю как такое можно из скрепок соорудить
Если всё же такое появится в этой ветке - это будет совершенно новый вид Radist неужто замахнулся?
-

Vovan - Сообщения: 3340
- Зарегистрирован: 05 окт 2005, 12:03
- Откуда: Литва
- прог. языки: asm
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() Radist » 16 янв 2013, 20:47
Radist » 16 янв 2013, 20:47
Сидел читал ветку про то как минимизировать гексопода, а тут на 19 странице такой красавец. Хочется конечно. Но пока я 16-ти ножку делаю.
-
Radist - Сообщения: 2254
- Зарегистрирован: 01 июл 2009, 08:59
- Откуда: Екатеринбург
- прог. языки: асемблер AVR
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() MegaBIZON » 16 янв 2013, 23:44
MegaBIZON » 16 янв 2013, 23:44
Radist писал(а):Он давно на форуме не появлялся, так что вся надежда на тебя. И там твоей рукой написано, что ты понял что к чему.
Я в тот момент понял лишь как оно шагает. Поворот я так и не раскусил.
А надежды на меня нету никакой, ибо я и в форум-то заглянуть не всякий день время имею... Почаще появляться буду только када на планшетку разорюсь.. по весне.
А с рукоделием я щас в завязке, как бы это ни было увы ))
-
MegaBIZON - Сообщения: 6285
- Зарегистрирован: 12 янв 2007, 00:34
- Откуда: Масква
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() Radist » 17 янв 2013, 12:32
Radist » 17 янв 2013, 12:32
Вот еще одна ссылка в тему, чтоб не искать по всему интернету
http://letsmakerobots.com/node/33493?page=1
http://letsmakerobots.com/node/33493?page=1
-
Radist - Сообщения: 2254
- Зарегистрирован: 01 июл 2009, 08:59
- Откуда: Екатеринбург
- прог. языки: асемблер AVR
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() Nesenin » 17 янв 2013, 13:19
Nesenin » 17 янв 2013, 13:19
не скрепки, но из "прочего хлама"(картон)
http://www.3dnews.ru/news/640296
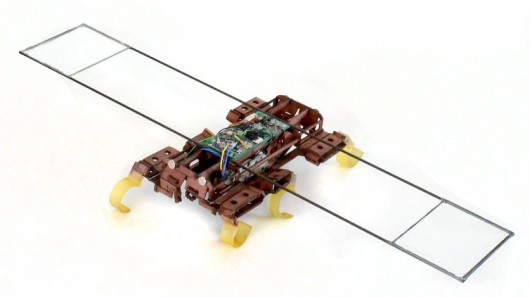
скорость до 2,7 м/с
видео от туда же http://youtu.be/k_teDKfHmHI
http://www.3dnews.ru/news/640296
скорость до 2,7 м/с
видео от туда же http://youtu.be/k_teDKfHmHI
-

Nesenin - Сообщения: 1345
- Зарегистрирован: 26 янв 2012, 03:59
- Откуда: Казань
- прог. языки: LabVIEW
- ФИО: Никита Есенин
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() MegaBIZON » 17 янв 2013, 21:50
MegaBIZON » 17 янв 2013, 21:50
мдя... кгуто.
я вот только этих крылышек не понял...
я вот только этих крылышек не понял...
-
MegaBIZON - Сообщения: 6285
- Зарегистрирован: 12 янв 2007, 00:34
- Откуда: Масква
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
![]() Nesenin » 17 янв 2013, 21:56
Nesenin » 17 янв 2013, 21:56
как на автомобилях - антикрыло, усиливающее контакт с землей
-
Nesenin - Сообщения: 1345
- Зарегистрирован: 26 янв 2012, 03:59
- Откуда: Казань
- прог. языки: LabVIEW
- ФИО: Никита Есенин
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 1