| |
roboforum.ruТехнический форум по робототехнике. |
|
Нужна Ваша критика
Re: Нужна Ваша критика
![]() barboss » 01 авг 2011, 15:58
barboss » 01 авг 2011, 15:58
Ничего так только подвески правда никакой, клиренс норм., катки непонятние узкие какие-то по 2шт. поставил(лучше замени и подпружинь или на качалки посади хоть какая-нибудь подвеска), муфты это плюс-снимают радиальную нагрузку,широкие гусеницы-это плюс проходимость больше, мотор-редуктор от стеклоочистителя-это минус большое энергопотребление батареи быстро сдохнут(советую редукторы от шуруповерта а двигатели от принтера или др 9-12В 0,1-0,5А). корпус капитальный но железный (вес коррозия). Плохо ещё что ремни короткие-ограничение в габаритах. 
-

barboss - Сообщения: 87
- Зарегистрирован: 26 май 2011, 22:34
Re: Нужна Ваша критика
![]() hadok » 01 авг 2011, 17:36
hadok » 01 авг 2011, 17:36
По поводу коррозии: а кто тебе сказал, что рама собрана не из нержавейки ?! 
Подвеска отсутствует только по причине того, что это всего лишь прототип. Первенец, так сказать.
Мотор-редукторы в данном случае выход оптимальный :
1. Готовый конструктивный модуль
2. Минимум деталей внутри = долговечность
3. Двигатели от принтера подойдут для "паркетных" моделей 12В * 0,5 А = 6 Вт !!! Мне такая мощность не интересна.
4. Червячный редуктор хоть и обладает малым КПД (около 70 %) но делает ненужным тормоз. Просто остановил двигатель на склоне. (С такой системой было бы удобно сдавать эстакаду в ГАИ )
)
Катки по 10 мм толщиной, так как их 12 масса равномерно распределена на все, поэтому толщины вполн достаточно. Робот свободно выдерживает нагрузку в 70 кг.
Подшипники я не ставил сознательно, КАПРОЛОН выполняет роль твёрдой смазки.
Про длину ремней с тобой согласен полностью, она во многом и определила общие габариты и конструкцию. Ну, какие смог найти (оно ведь ХАЛЯВНО досталось ).
).
Подвеска отсутствует только по причине того, что это всего лишь прототип. Первенец, так сказать.
Мотор-редукторы в данном случае выход оптимальный :
1. Готовый конструктивный модуль
2. Минимум деталей внутри = долговечность
3. Двигатели от принтера подойдут для "паркетных" моделей 12В * 0,5 А = 6 Вт !!! Мне такая мощность не интересна.
4. Червячный редуктор хоть и обладает малым КПД (около 70 %) но делает ненужным тормоз. Просто остановил двигатель на склоне. (С такой системой было бы удобно сдавать эстакаду в ГАИ
)Катки по 10 мм толщиной, так как их 12 масса равномерно распределена на все, поэтому толщины вполн достаточно. Робот свободно выдерживает нагрузку в 70 кг.
Подшипники я не ставил сознательно, КАПРОЛОН выполняет роль твёрдой смазки.
Про длину ремней с тобой согласен полностью, она во многом и определила общие габариты и конструкцию. Ну, какие смог найти (оно ведь ХАЛЯВНО досталось
).-

hadok - Сообщения: 166
- Зарегистрирован: 06 июн 2005, 02:27
- Откуда: Минск, Лида
Re: Нужна Ваша критика
![]() barboss » 01 авг 2011, 23:26
barboss » 01 авг 2011, 23:26
Мда нержавейка-жесть капитально(лучше алюминий, правда варить проблематичнее но можно паять-вес), но я бы не использовал, уж сильно ты замахнулся. Ну тогда надо всё делать капитально, а ты на стадии прототипа. Ну да ладно может переставишь, хз.
На счёт мотор-редуктора.
Ты прав(червячный самотормозящий и тд и тп), но имей ввиду:У червячного редуктора большое трение между червяком и ПЛАСТИКОВЫМ ведомым колесом, малый ресурс(рассчитан на кратковременную работу -стёкла дворники и тд.)и всё же двигатель много жрет и скорей всего у него малый момент на низких оборотах(с точки зрения экономичности жрёт много а даёт не на всю потреблённую энегрию, КПД).Твоя АКБ должна быть тогда внушительных размеров с большой ёмкостью-можно реально сэкономить установив двигатели менее мощные,но с большим моментом на низких оборотах.Эффект тот же самый только меньше жрать будут.
Насчёт катков.
На твои 3-и по 2-а средних катка как раз и приходится вся нагрузка от веса конструкции(ответственное место). Если нагрузка будет значительной ввиду малой площади пятна контакта в худшем случае,возможно не сразу, катки пропорят две борозды на резине. По этому советую установить катки в виде цилиндров на всю ширину гусеницы,и возможно больше чем 3-и, как ведущие катки. Приятно с тобой дискутировать спс.
Добавлено спустя 15 минут 35 секунд:
Для управления твоей махины могу предложить использовать промышленный пк типа EBOX с модемом или обычный ноут. Тогда можно будет организовать как и автономную работу-программирование (датчики) так и удалённое управление с другого ПК с видеосвязью. Но можно и подешевле микроконтроллеры, GSM или просто радиоканал самодельный или снятый с игрушки.
На счёт мотор-редуктора.
Ты прав(червячный самотормозящий и тд и тп), но имей ввиду:У червячного редуктора большое трение между червяком и ПЛАСТИКОВЫМ ведомым колесом, малый ресурс(рассчитан на кратковременную работу -стёкла дворники и тд.)и всё же двигатель много жрет и скорей всего у него малый момент на низких оборотах(с точки зрения экономичности жрёт много а даёт не на всю потреблённую энегрию, КПД).Твоя АКБ должна быть тогда внушительных размеров с большой ёмкостью-можно реально сэкономить установив двигатели менее мощные,но с большим моментом на низких оборотах.Эффект тот же самый только меньше жрать будут.
Насчёт катков.
На твои 3-и по 2-а средних катка как раз и приходится вся нагрузка от веса конструкции(ответственное место). Если нагрузка будет значительной ввиду малой площади пятна контакта в худшем случае,возможно не сразу, катки пропорят две борозды на резине. По этому советую установить катки в виде цилиндров на всю ширину гусеницы,и возможно больше чем 3-и, как ведущие катки. Приятно с тобой дискутировать спс.
Добавлено спустя 15 минут 35 секунд:
Для управления твоей махины могу предложить использовать промышленный пк типа EBOX с модемом или обычный ноут. Тогда можно будет организовать как и автономную работу-программирование (датчики) так и удалённое управление с другого ПК с видеосвязью. Но можно и подешевле микроконтроллеры, GSM или просто радиоканал самодельный или снятый с игрушки.
-
barboss - Сообщения: 87
- Зарегистрирован: 26 май 2011, 22:34
Re: Нужна Ваша критика
![]() hadok » 02 авг 2011, 14:12
hadok » 02 авг 2011, 14:12
В роботостроении я уделяю немалое внимание доступности материалов. Например алюминиевые трубки безусловно оптимальное решение. Но, достать квадратные трубки для меня практически нереально. Я обзвонил 80 % фирм, торгующих алюминиевым прокатом в Беларуси. К сожалению заказ от 500 кг... То есть мне как минимум грузовик этих труб купить нужно. Нашёл правда ещё один выход: использовать алюминиевый сложный профиль 
Стоимость 25 долларов за метр. Дорого, но оно того стоит, малый вес и очень большая прочность.
Но увы, доступ есть только к квадратной нержавейке. Кстати вес рамы не такой уж и большой что-то около 2 кг.
Двигатели:
механическая характеристика двигателя пост тока: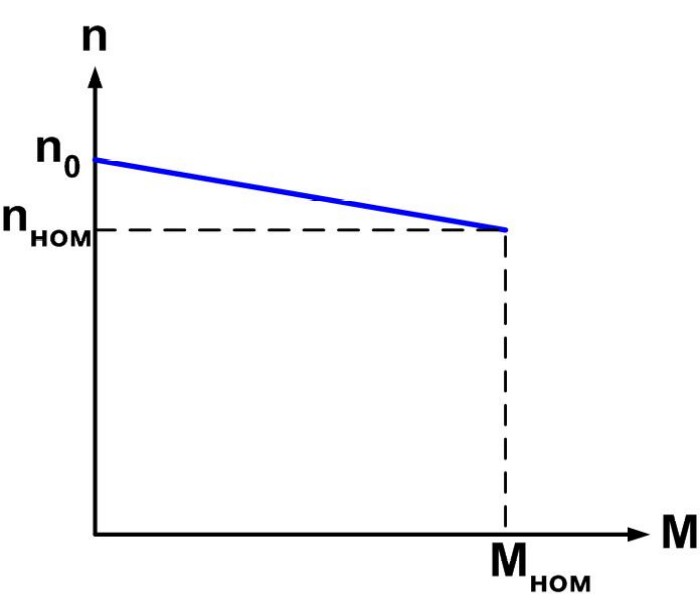
это я к словам о малом моменте при малых оборотах.
КПД не меняется от скорости вращения вала. То есть если на двигатель подано 10 Вт с учётом КПД 0,6 получаем полезная мощность 10*0,6=6 Вт. Дворники в машине на малой скорости разве слабее работают???
"Двигатели с большим моментом и малыми оборотами": формула мощности: момент*(угловая скорость)*КПД=U*I. При постоянном U ты предлагаешь поменять шило на мыло.
Катки: почему тогда у танка катки не такие, как у дорожного КАТКА ? Не хочешь танк, мол там траки железные, вспомни маленькие экскаваторы с резиновыми гусеницами. При МАКСИМАЛЬНОЙ нагрузке 75 кг + 14 кг(собственный вес робота) = 89 кг. 89 кг / 12 катков = 7,4 кг на каждый ролик. Поверь, такой ремень не испортится. А если учитывать, что при 80 кг он не используется, а чаще всего нагрузка 10 кг делай выводы о долговечности ремня.
Управление: безусловно промышленный одноплатный компьютер, под него проект и задумывался. Но нет денег. Используется ноутбук и его WiFi. Камера либо встроенная в бук либо выносная вебка.
Стоимость 25 долларов за метр. Дорого, но оно того стоит, малый вес и очень большая прочность.
Но увы, доступ есть только к квадратной нержавейке. Кстати вес рамы не такой уж и большой что-то около 2 кг.
Двигатели:
механическая характеристика двигателя пост тока:
это я к словам о малом моменте при малых оборотах.
КПД не меняется от скорости вращения вала. То есть если на двигатель подано 10 Вт с учётом КПД 0,6 получаем полезная мощность 10*0,6=6 Вт. Дворники в машине на малой скорости разве слабее работают???
"Двигатели с большим моментом и малыми оборотами": формула мощности: момент*(угловая скорость)*КПД=U*I. При постоянном U ты предлагаешь поменять шило на мыло.
Катки: почему тогда у танка катки не такие, как у дорожного КАТКА ? Не хочешь танк, мол там траки железные, вспомни маленькие экскаваторы с резиновыми гусеницами. При МАКСИМАЛЬНОЙ нагрузке 75 кг + 14 кг(собственный вес робота) = 89 кг. 89 кг / 12 катков = 7,4 кг на каждый ролик. Поверь, такой ремень не испортится. А если учитывать, что при 80 кг он не используется, а чаще всего нагрузка 10 кг делай выводы о долговечности ремня.
Управление: безусловно промышленный одноплатный компьютер, под него проект и задумывался. Но нет денег. Используется ноутбук и его WiFi. Камера либо встроенная в бук либо выносная вебка.
-
hadok - Сообщения: 166
- Зарегистрирован: 06 июн 2005, 02:27
- Откуда: Минск, Лида
Re: Нужна Ваша критика
![]() =DeaD= » 02 авг 2011, 15:47
=DeaD= » 02 авг 2011, 15:47
hadok писал(а):Стоимость 25 долларов за метр.
Где именно?

-

=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Нужна Ваша критика
![]() hadok » 02 авг 2011, 16:46
hadok » 02 авг 2011, 16:46
=DeaD= писал(а):hadok писал(а):Стоимость 25 долларов за метр.
Где именно?
Ну я имею в виду цену в Минске, представительство BOSCH-REXROTH.
-
hadok - Сообщения: 166
- Зарегистрирован: 06 июн 2005, 02:27
- Откуда: Минск, Лида
Re: Нужна Ваша критика
![]() barboss » 03 авг 2011, 11:20
barboss » 03 авг 2011, 11:20
Двигатели пост. тока бывают разные коструктивно и по назначению. Аинхронные, коллекторные, бесколекторные, 1-о,2-х,3-х,5-и полюсные, также надо учитывать тип намотки якоря, условия смазки и многое другое.
Двигатели о которых я тебе говорю это колекторные, асинхронные, 5-и полюсные с мощными постоянными магнитами. Подбитать прийдётся опытным путём.
Насчет катков. У танковых катков конструкция действительно схожа на твои, но надо учитывать что треки у танков и тракторов литые, составные из металла не деформирующегося при работе. Так что решать тебе как хочеш.
Двигатели о которых я тебе говорю это колекторные, асинхронные, 5-и полюсные с мощными постоянными магнитами. Подбитать прийдётся опытным путём.
Насчет катков. У танковых катков конструкция действительно схожа на твои, но надо учитывать что треки у танков и тракторов литые, составные из металла не деформирующегося при работе. Так что решать тебе как хочеш.
-
barboss - Сообщения: 87
- Зарегистрирован: 26 май 2011, 22:34
Re: Нужна Ваша критика
![]() avr123.nm.ru » 03 авг 2011, 13:08
avr123.nm.ru » 03 авг 2011, 13:08
В Москве так же.hadok писал(а):Я обзвонил 80 % фирм, торгующих алюминиевым прокатом в Беларуси. К сожалению заказ от 500 кг...
Просто розница на строительных рынках.
-

avr123.nm.ru - отсылающий читать курс
- Сообщения: 14195
- Зарегистрирован: 06 ноя 2005, 04:18
- Откуда: Москва
- Предупреждения: -8
Re: Нужна Ваша критика
![]() hadok » 03 авг 2011, 13:20
hadok » 03 авг 2011, 13:20
Асинхронная машина постоянного тока пока не создана! Утверждаешь обратное - приведи пример.
1 , 3 или 5 полюсов быть не может ибо у электрической машины постоянного тока имеется p - ПАР полюсов!
1 , 3 или 5 полюсов быть не может ибо у электрической машины постоянного тока имеется p - ПАР полюсов!
-
hadok - Сообщения: 166
- Зарегистрирован: 06 июн 2005, 02:27
- Откуда: Минск, Лида
Re: Нужна Ваша критика
![]() barboss » 03 авг 2011, 13:41
barboss » 03 авг 2011, 13:41
Как бы там нибыло почитай литературу типа "электрические машины".
Посмотри ссылку будет интересно
Посмотри ссылку будет интересно
-
barboss - Сообщения: 87
- Зарегистрирован: 26 май 2011, 22:34
Re: Нужна Ваша критика
![]() hadok » 03 авг 2011, 13:46
hadok » 03 авг 2011, 13:46
Таак, подожди, я вот как раз и почитал "Электрические машины". Асинхронных постоянного тока не может быть в принципе!!!
Ссылку смотрел давно. Ничего особенного, мотор-редукторы от электрического кресла на колёсах. Большой разницы между ними и стеклоочистителями я нее заметил.
Ссылку смотрел давно. Ничего особенного, мотор-редукторы от электрического кресла на колёсах. Большой разницы между ними и стеклоочистителями я нее заметил.
-
hadok - Сообщения: 166
- Зарегистрирован: 06 июн 2005, 02:27
- Откуда: Минск, Лида
Re: Нужна Ваша критика
![]() barboss » 04 авг 2011, 11:22
barboss » 04 авг 2011, 11:22
hadok писал(а):Таак, подожди, я вот как раз и почитал "Электрические машины". Асинхронных постоянного тока не может быть в принципе!!!
Что-то ты сильно зацепился за эти двигатели.
Ну вот возьми два двигателя один от игрушки советских времён и двигатель привода дисковода. Они оба рассчитаны на 6В. только первый потребляет 1А-1,5А и крутится очень шумно и быстро и остановить рукой за ось можно без особых усилий, а второй потребляет 0,02А и крутится медленно и становить рукой тяжелее чем первый.
Какими формулами и какими теориями ты собираешься это объяснить.
А объяснить очень легко: способ намотки и конструкция якоря, число витков, диаметр провода, качество и конструкция в целом.
И никакие термины о теории здесь ничего не докажут. Ты хоть с этим сможешь согласиться ведь факт налицо.
Просто я думаю что тебе просто удобно использовать твои редукторы и тебе не хочется допускать мысли о замене. Если так, то я не осуждаю возможно я тоже не захотел бы что-то менять просто не надо лезть в бутылку.
-
barboss - Сообщения: 87
- Зарегистрирован: 26 май 2011, 22:34
Re: Нужна Ваша критика
![]() hadok » 04 авг 2011, 12:33
hadok » 04 авг 2011, 12:33
avr123.nm.ru писал(а):В Москве так же.
Давайте скинемся и купим 500 кг
 ))) Надолго хватит.
))) Надолго хватит.Добавлено спустя 1 час 1 минуту 59 секунд:
Да не лезу я в бутылку. Ну просто не бывает так, что 6*0,02 = 0,12 Вт имеет такой же момент как и 6 ваттный двигатель. Ты вот пишешь про двигатель от сидюка, а какой именно? С привода лотка или раскрутка диска? Если раскрутка диска, то там же шаговый стоит, не думаю что его можно сравнить с ДПТ.
0,02 это на холостом ходу? А при попытке его остановить.
В своё время я купил две электрические отвёртки (слабее чем ШУРИК, но принцип тот же). Признаться, шумновато работает планетарный редуктор. Хотя в принципе очень неплохой вариант, просто мне он не подходит, учитывая использование в полевых, а не в паркетных.
Ладно, видимо каждый останется со своим мнением.
Предлагаю

В новом проекте я собираюсь использовать вот такие двигатели :http://www.zdmotor.com/products/DC-Geared-Motor-197021.html
стоимость 92 бакса за комплект (двигатель+редуктор) на заводе изготовителе Китае.
Скорость движения робота 80см/с, тяга одного двигателя 10 кг!!!
-
hadok - Сообщения: 166
- Зарегистрирован: 06 июн 2005, 02:27
- Откуда: Минск, Лида
Re: Нужна Ваша критика
![]() FantasyOR » 04 авг 2011, 16:47
FantasyOR » 04 авг 2011, 16:47
здравствуйте hadok.
скажите, сколько полезной нагрузки может взять на борт эта тележка? Наверняка проверяли, 10-20 кг?
скажите, сколько полезной нагрузки может взять на борт эта тележка? Наверняка проверяли, 10-20 кг?
-

FantasyOR - Сообщения: 62
- Зарегистрирован: 11 окт 2009, 20:59
- Откуда: москва, королёв
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0