моя идея: http://roboforum.ru/forum35/topic14576.html
перешла на стадию проекта:
на данный момент собран вот такой тестовый агрегат:
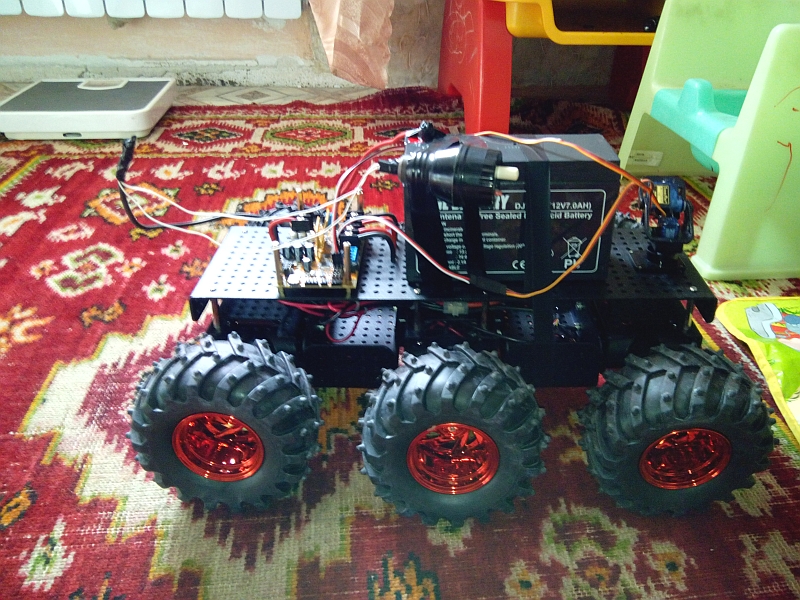
состав:
шасси Wild Thumper 6WD Black 75:1 with 2 encoders
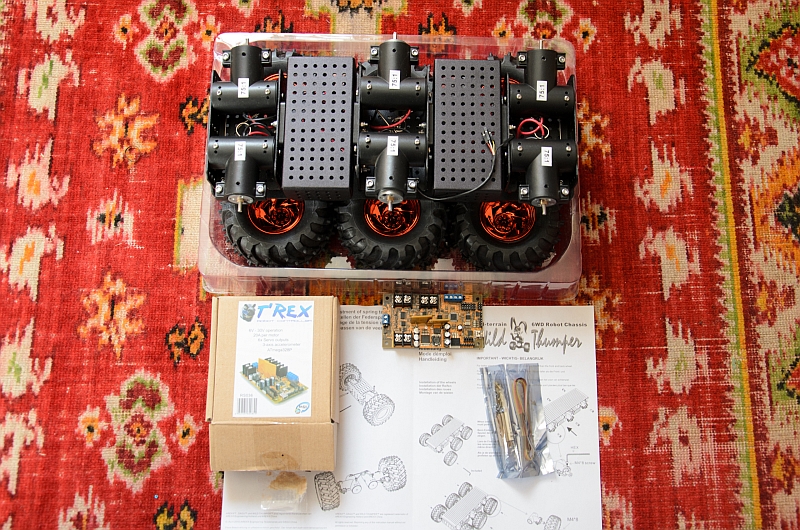

плата управления движками TREX controller

вот ее схема:
http://roboforum.ru/download/file.php?id=34085
Питание: свинцовый акум на 12в 7а
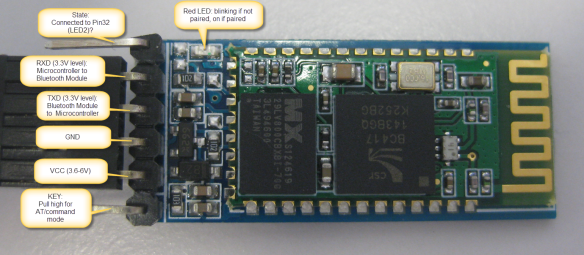
блютус модуль HC-06
2х осевой вращатель

4 серво машинки

насос

на первом этапе должно получиться подобие пожарной машины, на управлении, брызгалка водой.
далее сменю акумы на ли по 7,4в, чтоб не перенапрягать движки.
потом в плана установка клешни для захвата предметов.
на сегодняшний день, телега не управляемая, столкнулся с проблемой управления через блютус модуль.
подробности можно почитать в предыдущей теме. http://roboforum.ru/forum35/topic14576.html на последних страницах.