| |
roboforum.ruТехнический форум по робототехнике. |
|
Автономная навигация робота
Правила форума
В этом форуме новые темы не создаются, однако обсуждение допустимо.
В этом форуме новые темы не создаются, однако обсуждение допустимо.
Re: Автономная навигация робота
![]() =DeaD= » 18 сен 2009, 10:03
=DeaD= » 18 сен 2009, 10:03
2EDV: А какая точность определения образа в кадре? И может ли этот алгоритм выдавать линейные размеры образа с достаточной точностью?
-

=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Автономная навигация робота
![]() EDV » 18 сен 2009, 10:33
EDV » 18 сен 2009, 10:33
Метод классификации контрастных пятен (ККП) позволит проанализировать множество «особенностей» (features) входного изображения и ассоциировать их с текущим местоположением. В «ККП» анализируется не конкретный «маяк» а множество особенностей изображения. Этот алгоритм можно использовать как вспомогательный, для подстраховки AVM. А вот алгоритм AVM уже более точен, и находит конкретные «маяки», в направлении которых можно будет переместиться. Эти алгоритмы могут дополнять друг друга.
«ККП» не сможет, AVM сможет. В AVM масштабирование производится с шагом 25% от размера ключевого изображения на каждом шаге (этот параметр можно изменить, см. «AssociativeMemory.h» -> ptSearchScaleStep, // Scale step of searching for recognition (0.25)).
Добавлено спустя 6 минут 51 секунду:
Пока что всё ПО разрабатывается на C++ под PC. На данном этапе важно отработать (создать) саму технологию навигации робота по визуальным ориентирам. Ну а там уже видно будет...
=DeaD= писал(а):2EDV: И может ли этот алгоритм выдавать линейные размеры образа с достаточной точностью?
«ККП» не сможет, AVM сможет. В AVM масштабирование производится с шагом 25% от размера ключевого изображения на каждом шаге (этот параметр можно изменить, см. «AssociativeMemory.h» -> ptSearchScaleStep, // Scale step of searching for recognition (0.25)).
Добавлено спустя 6 минут 51 секунду:
EdGull писал(а):а на МК например на ARM9 это переносится?
Пока что всё ПО разрабатывается на C++ под PC. На данном этапе важно отработать (создать) саму технологию навигации робота по визуальным ориентирам. Ну а там уже видно будет...
-

EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Re: Автономная навигация робота
![]() =DeaD= » 18 сен 2009, 10:34
=DeaD= » 18 сен 2009, 10:34
2EDV: Если просто менять этот параметр - производительность должна упасть вроде прямо пропорционально количеству шагов. А можно добить алгоритм, чтобы он мог уже распознанные фрагменты дораспознавать с высокой точностью определения положения в кадре и масштаба? Это вроде не должно сильно снизить производительность?
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
-
EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Re: Автономная навигация робота
![]() EDV » 21 сен 2009, 08:51
EDV » 21 сен 2009, 08:51
Траектория, полученная по визуальным ориентирам (AVM + "ККП"):
Демонстрационная версия с исходными текстами:
http://edv-detail.narod.ru/Navigator_Tool_Kit.zip
Navigator_Tool_Kit\samples\LocationTree
Демонстрационная версия с исходными текстами:
http://edv-detail.narod.ru/Navigator_Tool_Kit.zip
Navigator_Tool_Kit\samples\LocationTree
-
EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Re: Автономная навигация робота
![]() =DeaD= » 21 сен 2009, 09:00
=DeaD= » 21 сен 2009, 09:00
Это круто, а какая-нибудь оценка точности будет?  типа точность +/- 5см от реальной или +/- 15см или как?
типа точность +/- 5см от реальной или +/- 15см или как?
типа точность +/- 5см от реальной или +/- 15см или как?-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Автономная навигация робота
![]() EDV » 21 сен 2009, 09:25
EDV » 21 сен 2009, 09:25
Для этого нужно будет провести отдельные эксперименты, разработать методику проверки и т. д. Пока я этим не занимался, это всего лишь первый вариант, сейчас важно развить идею, потом будем оценивать и улучшать.
-
EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Re: Автономная навигация робота
![]() =DeaD= » 21 сен 2009, 09:28
=DeaD= » 21 сен 2009, 09:28
А как же разбираться - улучшили мы идею или нет, если точность не меряем?
Добавлено спустя 35 секунд:
В сторону SLAM-ов всяких пока не смотрели?
Добавлено спустя 35 секунд:
В сторону SLAM-ов всяких пока не смотрели?
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Автономная навигация робота
![]() Vooon » 21 сен 2009, 09:53
Vooon » 21 сен 2009, 09:53
Интересно Мой танк почти готов (исправить питание камеры). И видео-ввод уже есть.
Вы еще не пробовали сделать порт под линукс?
Мой танк почти готов (исправить питание камеры). И видео-ввод уже есть.Вы еще не пробовали сделать порт под линукс?
-

Vooon - Site Admin
- Сообщения: 3339
- Зарегистрирован: 09 фев 2006, 15:36
- Откуда: Москва
- Skype: vooon341
- прог. языки: Python, C, Bash, JavaScript, C++, PHP
- ФИО: Владимир Ермаков
Re: Автономная навигация робота
![]() EDV » 21 сен 2009, 10:13
EDV » 21 сен 2009, 10:13
=DeaD= писал(а):А как же разбираться - улучшили мы идею или нет, если точность не меряем?
Для тестирования алгоритма «Location tree» обязательно нужно будет разработать методику для оценки точности (ну или поискать готовую методику).
=DeaD= писал(а):В сторону SLAM-ов всяких пока не смотрели?
А смысл? Там махровая математика (высшая), а у меня все решения простые и математика попроще (немного тригонометрии и решение квадратных уравнений и всё пожалуй).
2Vooon:
Пока что порта под Linux не предвидится, сейчас важно развить технологию (идею) самой навигации по визуальным ориентирам. Но я не вижу никаких препятствий использовать текущие наработки под Windows. Ну а когда технология более-менее сформируется, можно будет и порт под Linux сделать.
-
EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Re: Автономная навигация робота
![]() =DeaD= » 21 сен 2009, 10:28
=DeaD= » 21 сен 2009, 10:28
В базовом SLAM вроде обычное умножение и обращение матриц, не более... в общем к чему пустые слова - скоро возьмусь пожалуй и попробую сам этот SLAM прикрутить. У вас интерфейсы к выделялке хороших примечательных образов открытые ведь? (к распознавалке ясно, что открытые)
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Автономная навигация робота
![]() EDV » 21 сен 2009, 11:36
EDV » 21 сен 2009, 11:36
Всё что касается алгоритма «Location tree» и программного пакета «Navigator Tool Kit» представлено исходными текстами программ, с примерами, и подробными комментариями на русском языке.
Исключением является только «закрытая» технология AVM, которая представлена в бинарном виде (библиотека). Но для любителей развивать свои собственные алгоритмы распознавания я предоставляю альтернативный «распознаватель образов» в исходниках.
Алгоритм «Классификации контрастных пятен»:
Navigator_Tool_Kit\include\ImageIdentification.h
Пример:
http://edv-detail.narod.ru/Navigator_Tool_Kit.zip
Navigator_Tool_Kit\samples\LocationSearching
Добавлено спустя 50 минут 14 секунд:
У некоторых посетителей форума, начали появляться вопросы по использованию библиотек навигации. Поэтому я создал новую тему «Использование Navigator Tool Kit».
Так что если есть вопросы, спрашивайте.
Исключением является только «закрытая» технология AVM, которая представлена в бинарном виде (библиотека). Но для любителей развивать свои собственные алгоритмы распознавания я предоставляю альтернативный «распознаватель образов» в исходниках.
Алгоритм «Классификации контрастных пятен»:
Navigator_Tool_Kit\include\ImageIdentification.h
Пример:
http://edv-detail.narod.ru/Navigator_Tool_Kit.zip
Navigator_Tool_Kit\samples\LocationSearching
Добавлено спустя 50 минут 14 секунд:
У некоторых посетителей форума, начали появляться вопросы по использованию библиотек навигации. Поэтому я создал новую тему «Использование Navigator Tool Kit».
Так что если есть вопросы, спрашивайте.
-
EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Re: Автономная навигация робота
![]() Amator » 05 окт 2009, 01:24
Amator » 05 окт 2009, 01:24
Ребята, кто нить юзал этот проект? Мне кажется тут можно кое что полезное найти по этой теме. Если у кого есть опыт, поделитесь впечатлениями
- Amator
- Сообщения: 10
- Зарегистрирован: 27 янв 2009, 11:23
- Откуда: Новосибирск
Re: Автономная навигация робота
![]() =DeaD= » 05 окт 2009, 07:46
=DeaD= » 05 окт 2009, 07:46
Предлагаю всякие другие проекты в отдельных темах обсуждать. А тут это оффтопик. Таких проектов по зрению с десяток легко за полчаса найти. RoboRealm тот же.
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Автономная навигация робота
![]() EDV » 26 окт 2009, 15:57
EDV » 26 окт 2009, 15:57
Попробую ещё раз объяснить идею 
Идея: Location tree
Создаём первый экземпляр AVM для хранения в качестве ассоциации двух координат (P[0], P[1]) в формате float (точка, куда мы можем отправиться).
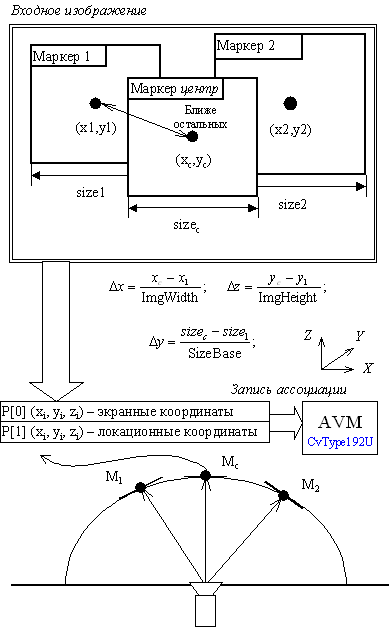
Файл: AssociativeMemory192u.h
Запоминаем центральную часть экрана в AVM как начало отсчёта. Если расстояние от центра этого распознаваемого маркера превысит некое пороговое значение, то создаём новый маркер, в который записываем координаты смещения относительно начала отсчёта. Если расстояние от центра ближайшего маркера превысит порог, то снова создаём новый маркер и т.д. Таким образом, создаём экранные привязки (маркеры), наблюдение за которыми (как в случае с энкодерами) поможет дать ответ на вопросы: На какой угол повернулась камера? Сколько проехали от последнего сохранённого местоположения?
Создаём второй экземпляр AVM для хранения в качестве ассоциации текущего местоположения видеокамеры (точка, где мы находимся).
Файл: AssociativeMemory160u.h
Изначально указываем наше местоположение, как начало отсчёта (x=0,y=0, z=0; горизонтальный угол hA=0, вертикальный угол vA=0), и ассоциируем изображение с камеры с текущим местоположением (пишем во второй экземпляр AVM). Как только положение камеры изменится настолько, что новый вид из камеры уже не будет распознаваться AVM, формируем новую запись местоположения (координаты и угол наблюдения камеры определяем согласно пройденных привязок на этом интервале) и т.д.
Демонстрационная версия с исходными текстами (обновил):
http://edv-detail.narod.ru/Navigator_Tool_Kit.zip
Проект: Navigator_Tool_Kit\samples\src\LocationTree
Идея: Location tree
Создаём первый экземпляр AVM для хранения в качестве ассоциации двух координат (P[0], P[1]) в формате float (точка, куда мы можем отправиться).
Файл: AssociativeMemory192u.h
- Код: Выделить всё • Развернуть
// Definition of coordinate structure
struct CvXYZ32F {
float x,y,z;
// Set a coordinate
void Set(float aX, float aY, float aZ) { x = aX; y = aY; z = aZ; }
};
// Definition of data type
#define cType192U_c 24
#define cType192U_s 12
#define cType192U_f 6
#define cType192U_p 2
union CvType192U {
char c[cType192U_c];
short s[cType192U_s];
float f[cType192U_f];
CvXYZ32F p[cType192U_p];
};
Запоминаем центральную часть экрана в AVM как начало отсчёта. Если расстояние от центра этого распознаваемого маркера превысит некое пороговое значение, то создаём новый маркер, в который записываем координаты смещения относительно начала отсчёта. Если расстояние от центра ближайшего маркера превысит порог, то снова создаём новый маркер и т.д. Таким образом, создаём экранные привязки (маркеры), наблюдение за которыми (как в случае с энкодерами) поможет дать ответ на вопросы: На какой угол повернулась камера? Сколько проехали от последнего сохранённого местоположения?
Создаём второй экземпляр AVM для хранения в качестве ассоциации текущего местоположения видеокамеры (точка, где мы находимся).
Файл: AssociativeMemory160u.h
- Код: Выделить всё • Развернуть
// Definition of location structure
struct CvLocation {
CvXYZ32F p; // Location point
float hA; // Horizontal survey angle
float vA; // Vertical survey angle
};
// Definition of data type
#define cType160U_c 20
#define cType160U_s 10
#define cType160U_f 5
union CvType160U {
char c[cType160U_c];
short s[cType160U_s];
float f[cType160U_f];
CvLocation l;
};
Изначально указываем наше местоположение, как начало отсчёта (x=0,y=0, z=0; горизонтальный угол hA=0, вертикальный угол vA=0), и ассоциируем изображение с камеры с текущим местоположением (пишем во второй экземпляр AVM). Как только положение камеры изменится настолько, что новый вид из камеры уже не будет распознаваться AVM, формируем новую запись местоположения (координаты и угол наблюдения камеры определяем согласно пройденных привязок на этом интервале) и т.д.
Демонстрационная версия с исходными текстами (обновил):
http://edv-detail.narod.ru/Navigator_Tool_Kit.zip
Проект: Navigator_Tool_Kit\samples\src\LocationTree
-
EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0