Ну ты конечно сварщик )))
А батарейка ничё, бодрая! Де таких дают? Не сильно сложно?
| |
roboforum.ruТехнический форум по робототехнике. |
|
beamчик
Re: beamчик
![]() MegaBIZON » 11 мар 2011, 22:15
MegaBIZON » 11 мар 2011, 22:15
-

MegaBIZON - Сообщения: 6285
- Зарегистрирован: 12 янв 2007, 00:34
- Откуда: Масква
Re: beamчик
![]() landfly » 11 мар 2011, 23:45
landfly » 11 мар 2011, 23:45
Батарейку брал тут http://www.kosmodrom.com.ua, только там смотрю таких уже нету, CIS-ST0.25_1117 материал - CIS(Медь Индий Диселенид напылен на стекло, кремния в батарее нет). 60х60х2 мм. U хол.хода –5 вольт, I корот.зам. - 100 mA., Р - 0,25W. Из минусов то что работает только на солнце, в тени первый бим лучше пашет т.к. там тип батареи другой.
-

landfly - Сообщения: 25
- Зарегистрирован: 07 авг 2008, 03:22
- Откуда: Украина, Донецкая обл.
- ФИО: Александр

Re: beamчик
![]() landfly » 12 мар 2011, 09:06
landfly » 12 мар 2011, 09:06
Да у китайцев все дешевле будет, к нам ноуты приходят собранные там.
-
landfly - Сообщения: 25
- Зарегистрирован: 07 авг 2008, 03:22
- Откуда: Украина, Донецкая обл.
- ФИО: Александр
Re: beamчик
![]() Sergei3090 » 13 авг 2011, 10:05
Sergei3090 » 13 авг 2011, 10:05

Вот тоже напаял одноклеточное, панелька от садового фонаря, мотор из DVD проигрывателя, диск- драйвер аудиокарты, видио нет и не будет за отсутствием камеры которая могла бы действовать на улице, всё снимаю не вэбку.
в этом жуке электроники нет, до видео так и не дожил
другой собранный по той же схеме, видео есть, но нет фото
А этот просто ходит, отталкивается от препятствий усами, как бы обходит.

И Wall-e, обходит препятствия двигаясь на свет

-

Sergei3090 - Сообщения: 548
- Зарегистрирован: 16 июл 2011, 13:32
- Откуда: Планета Земля
Re: beamчик
![]() MegaBIZON » 13 авг 2011, 23:37
MegaBIZON » 13 авг 2011, 23:37
Всё отлично, но не нужно публиковать одни и те же поделки во всех углах форума - показал в одном месте, и все кому надо увидят. Я на эту тему уже говорил.
-
MegaBIZON - Сообщения: 6285
- Зарегистрирован: 12 янв 2007, 00:34
- Откуда: Масква
Re: beamчик
![]() Sergei3090 » 14 авг 2011, 12:48
Sergei3090 » 14 авг 2011, 12:48
Извиняюсь  , просто я думал что всё по теме надо, оно по двум темам подходит, ну я и выложил
, просто я думал что всё по теме надо, оно по двум темам подходит, ну я и выложил 
, просто я думал что всё по теме надо, оно по двум темам подходит, ну я и выложил -
Sergei3090 - Сообщения: 548
- Зарегистрирован: 16 июл 2011, 13:32
- Откуда: Планета Земля
Re: beamчик
![]() MegaBIZON » 14 авг 2011, 23:24
MegaBIZON » 14 авг 2011, 23:24
не, как-то лавируй )) Ато почти кросспостинг какой-то получается.
А вот с бимом видос бы
А вот с бимом видос бы
-
MegaBIZON - Сообщения: 6285
- Зарегистрирован: 12 янв 2007, 00:34
- Откуда: Масква
Re: beamчик
![]() SmorBoB » 03 сен 2011, 04:30
SmorBoB » 03 сен 2011, 04:30
2Sergei3090: в видео твоих, считаю, зря звука родного нет. Тяжело смотреть и не слышать. 
-

SmorBoB - Сообщения: 232
- Зарегистрирован: 07 сен 2009, 01:54
- Откуда: Стерлитамак (Башкирия)
- ФИО: Андрей
Re: beamчик
![]() starterz » 05 сен 2011, 01:37
starterz » 05 сен 2011, 01:37
Что нам нужно для счастья, други? Чтобы жучки паучки обходили препятствия, двигались к свету, и не проскакивали светового пятна на всех парах. Так такие есть у нас!
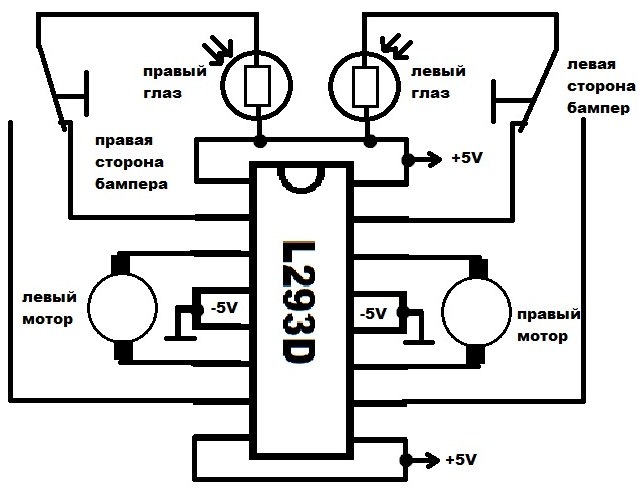
Предлагаю свою разработку - экономичную бюджетную реверсивную схему средней мощности:
Схемка реализует движение на свет, остановку в световом пятне,обход препятствий за счет реверса двигателя (танковый разворот).
Мостов с кучей горячих транзисторов в ней нет, громоздких реле нет, тяжелые радиаторы для управляющих транзисторов VT1, VT2 не требуются.
Поэтому схема экстремально легкая для своей мощности (до 4 Вт на двигателе). Экономичность достигается разгрузкой тепловых режимов ключевых транзисторов (о чем далее),а так же засчет полного отключения соответствующего плеча схемы во время реверса.
Кстати при этом подключение двигателя происходит напрямую от батареи, а не через фотопривод как в большинстве схем. Это исключает случай недостатка мощности обратного хода робота при слабом освещении.
Кроме того резисторы R3,R4 предотвращают разряд батарей в темноте.
В схеме приняты меры (диоды на ток не менее 2A) для некритичности к неодновременному срабатыванию переключателей в паре (КЗ не будет и транзисторы не сгорят).
Номиналы резисторов R1,R2 должны быть 50-55 ом это рулез. Резисторы R3,R4 по 50-60 килоом.
Составные транзисторы это и есть фишка, разгружающая ключи по теплу, поэтому не меняйте их на один транзистор с большим КУ, иначе при малой освещенности спалите ключи!
Кроме того такая схема дает возможность использовать практически любые n-p-n транзисторы, так как КУ получается высоким в любом случае.
Вместо КТ815 лучше поставить зарубежные аналоги (с бОльшим КУ по току 50-100).
КУ очень важен для лучшего теплового режима.
Особенность схемы - двойные глаза в каждом плече(хотя это не обязательно, если использовать классическую схему нижний фототранзистор можно исключить, но тогда робот будет пролетать за световое пятно). А так же питание каждого плеча через базовую цепь ключевого транзистора.
Это позволяет выполнять глаза отдельным блоком с всего двумя соединительными точками(на ключ и на двигатель).
Один фототранзистор (верхний по схеме в плече) работает как обычно, а второй служит тормозным (его располагают на корпусе робота сзади). Когда освещенность обоих сравняется схема отключит двигатель и робот не выскочит из освещенного участка. Условием для движения служит большая освещенность первого фототранзистора, по сравнению с тормозным.
Усы, приделанные к сдвоенным микропереключателям включают реверс двигателей, переключая полярность их питания.
Если потребуется можно легко поставить вместо сдвоенных переключателей реле, например для дистанционного управления.
Ну и конечно, датчики выходят на противоположные двигатели.
Предлагаю свою разработку - экономичную бюджетную реверсивную схему средней мощности:
- Схемка от Игорёхи
Схемка реализует движение на свет, остановку в световом пятне,обход препятствий за счет реверса двигателя (танковый разворот).
Мостов с кучей горячих транзисторов в ней нет, громоздких реле нет, тяжелые радиаторы для управляющих транзисторов VT1, VT2 не требуются.
Поэтому схема экстремально легкая для своей мощности (до 4 Вт на двигателе). Экономичность достигается разгрузкой тепловых режимов ключевых транзисторов (о чем далее),а так же засчет полного отключения соответствующего плеча схемы во время реверса.
Кстати при этом подключение двигателя происходит напрямую от батареи, а не через фотопривод как в большинстве схем. Это исключает случай недостатка мощности обратного хода робота при слабом освещении.
Кроме того резисторы R3,R4 предотвращают разряд батарей в темноте.
В схеме приняты меры (диоды на ток не менее 2A) для некритичности к неодновременному срабатыванию переключателей в паре (КЗ не будет и транзисторы не сгорят).
Номиналы резисторов R1,R2 должны быть 50-55 ом это рулез. Резисторы R3,R4 по 50-60 килоом.
Составные транзисторы это и есть фишка, разгружающая ключи по теплу, поэтому не меняйте их на один транзистор с большим КУ, иначе при малой освещенности спалите ключи!
Кроме того такая схема дает возможность использовать практически любые n-p-n транзисторы, так как КУ получается высоким в любом случае.
Вместо КТ815 лучше поставить зарубежные аналоги (с бОльшим КУ по току 50-100).
КУ очень важен для лучшего теплового режима.
Особенность схемы - двойные глаза в каждом плече(хотя это не обязательно, если использовать классическую схему нижний фототранзистор можно исключить, но тогда робот будет пролетать за световое пятно). А так же питание каждого плеча через базовую цепь ключевого транзистора.
Это позволяет выполнять глаза отдельным блоком с всего двумя соединительными точками(на ключ и на двигатель).
Один фототранзистор (верхний по схеме в плече) работает как обычно, а второй служит тормозным (его располагают на корпусе робота сзади). Когда освещенность обоих сравняется схема отключит двигатель и робот не выскочит из освещенного участка. Условием для движения служит большая освещенность первого фототранзистора, по сравнению с тормозным.
Усы, приделанные к сдвоенным микропереключателям включают реверс двигателей, переключая полярность их питания.
Если потребуется можно легко поставить вместо сдвоенных переключателей реле, например для дистанционного управления.
Ну и конечно, датчики выходят на противоположные двигатели.
- starterz
- Сообщения: 32
- Зарегистрирован: 05 сен 2011, 01:26
- Откуда: Нальчик
- прог. языки: C++
- ФИО: Никульшин Игорь Борисович
- starterz
- Сообщения: 32
- Зарегистрирован: 05 сен 2011, 01:26
- Откуда: Нальчик
- прог. языки: C++
- ФИО: Никульшин Игорь Борисович
Re: beamчик
![]() starterz » 06 сен 2011, 22:55
starterz » 06 сен 2011, 22:55
Еще как есть, мой Триколёсик! Тока сфоткать не могу, убил сотовый насмерть :/
Литиевый плоский аккумулятор от нокии (4.8 в), моторчики от плейеров.
Литиевый плоский аккумулятор от нокии (4.8 в), моторчики от плейеров.
- starterz
- Сообщения: 32
- Зарегистрирован: 05 сен 2011, 01:26
- Откуда: Нальчик
- прог. языки: C++
- ФИО: Никульшин Игорь Борисович
Re: beamчик
![]() Vovan » 06 сен 2011, 23:19
Vovan » 06 сен 2011, 23:19
Неплохо!
Фото\видео надо постараться всё-же
А разве бывают литиевые и 4,8в? наверное все же NiMH? либо литий, но 3,6в (в некоторых источниках 3,7в)
Фото\видео надо постараться всё-же
А разве бывают литиевые и 4,8в? наверное все же NiMH? либо литий, но 3,6в (в некоторых источниках 3,7в)
-

Vovan - Сообщения: 3340
- Зарегистрирован: 05 окт 2005, 12:03
- Откуда: Литва
- прог. языки: asm
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0