Ну дык датчик возвращает на запрос свой код. привязать код к местоположению это уже вопрос простой вроде как. Чаще ставим датчики - выше получаем точность. Можно сколько-то дополнительно получить став точно над датчиком (светить на него узконаправленной антенной) а дальше по одометру до следующего "ключевого" датчика.
Я думаю что видео накладывает много ограничений. Датчики должны быть в прямой видимости, а на участке могут быть деревья, пригорки (ландшафтный дизайн, чо), строения какие-то. Привязка к сетке датчиков с последующей корректировкой по месту кажется даже проще. Датчики препятствий и сонары позволят двигаться вдоль стен, например. Одометрия - двигаться прямо. Датчик высоты травы позволит определить что скошено, а что нет - тут может быть завязка на видео, а можно контактный подумать. Абсолютные координаты дело не слишком нужное в таком деле, имхо. Ориентироваться по каким-то близким предметам для того чтобы на них собственно не наехать и скорректировать траекторию в соответствии с задачей в случае с определением скошенной травы.
| |
roboforum.ruТехнический форум по робототехнике. |
|
Идея навигации сервис-робота для загородного дома
Сообщений: 63
• Страница 3 из 5 • 1, 2, 3, 4, 5
Re: Идея навигации сервис-робота для загородного дома
![]() frig » 24 янв 2011, 12:15
frig » 24 янв 2011, 12:15
- frig
- Сообщения: 1640
- Зарегистрирован: 12 фев 2007, 12:25
- Откуда: Днепр
Re: Идея навигации сервис-робота для загородного дома
![]() =DeaD= » 24 янв 2011, 12:29
=DeaD= » 24 янв 2011, 12:29
frig, давайте конкретно - какая точность и сколько для этого надо датчиков натыкать и как это делать скажем в асфальтовой дорожке. Одометрия по снегу это конечно да, впечатляет. А видео да, накладывает много ограничений, - датчики должны быть в прямой видимости. ИМХО это как-то на порядок проще чем всю территорию утыкать RFID'ами.
-

=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Идея навигации сервис-робота для загородного дома
![]() frig » 24 янв 2011, 12:40
frig » 24 янв 2011, 12:40
Каждый раз как начинаем с тобой спорить - ты начинаешь мне выкать опять.
тема же про идею. вот и я идею запулил. исследованиями я по понятным причинам не занимался.
С дорожками да, с дорожками беда. Тут конечно от ширины зависит. Если шириной до 2-х метров, то можно сделать прокол под углом и хоть на середину дорожки поставить метку. Тут больше вопрос в затуханиях через всякие такие материалы.
Ну вот в том и бок, что видимость штука не простая достаточно. Можно, конечно попробовать добавить датчиков за препятствиями - нормально будет работать?
может и так. тут конечно вопрос в том сколько их надо будет этих меток. я думаю сетка с шагом в пол метра будет не слишком напряжной.
отец сейчас занимается постройкой робота который будет возить условный груз по ровной площадке, можно считать нечто вроде склада. Пока что основной вариант для навигации это линии на площадке + какие-то маяки на линиях. Еще хорошо бы продублировать систему видео, но бок в том, что поставить наверх датчик достаточно проблематично. Скажи вот, можно обойтись без датчиков и применить видео для предотвращения столкновений?
какая точность и сколько для этого надо датчиков натыкать
тема же про идею. вот и я идею запулил. исследованиями я по понятным причинам не занимался.
и как это делать скажем в асфальтовой дорожке
С дорожками да, с дорожками беда. Тут конечно от ширины зависит. Если шириной до 2-х метров, то можно сделать прокол под углом и хоть на середину дорожки поставить метку. Тут больше вопрос в затуханиях через всякие такие материалы.
датчики должны быть в прямой видимости.
Ну вот в том и бок, что видимость штука не простая достаточно. Можно, конечно попробовать добавить датчиков за препятствиями - нормально будет работать?
ИМХО это как-то на порядок проще чем всю территорию утыкать RFID'ами.
может и так. тут конечно вопрос в том сколько их надо будет этих меток. я думаю сетка с шагом в пол метра будет не слишком напряжной.
отец сейчас занимается постройкой робота который будет возить условный груз по ровной площадке, можно считать нечто вроде склада. Пока что основной вариант для навигации это линии на площадке + какие-то маяки на линиях. Еще хорошо бы продублировать систему видео, но бок в том, что поставить наверх датчик достаточно проблематично. Скажи вот, можно обойтись без датчиков и применить видео для предотвращения столкновений?
- frig
- Сообщения: 1640
- Зарегистрирован: 12 фев 2007, 12:25
- Откуда: Днепр
Re: Идея навигации сервис-робота для загородного дома
![]() =DeaD= » 24 янв 2011, 12:45
=DeaD= » 24 янв 2011, 12:45
Ну можно ставить видео-датчик не наверх, а по бокам, типа кольцо такое вокруг робота 
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Идея навигации сервис-робота для загородного дома
![]() frig » 24 янв 2011, 12:50
frig » 24 янв 2011, 12:50
не прокатит. робот под грузом находится. робот плоский почти, а над ним громадина груза
- frig
- Сообщения: 1640
- Зарегистрирован: 12 фев 2007, 12:25
- Откуда: Днепр
Re: Идея навигации сервис-робота для загородного дома
![]() =DeaD= » 24 янв 2011, 13:02
=DeaD= » 24 янв 2011, 13:02
Ну нет так нет, я же не для вашей ситуации идею предлагал
Добавлено спустя 7 минут 28 секунд:
А под навигацию по RFID меткам можно сделать отдельную тему и там всё нормально обсудить, поскольку условия применения категорически разные.
Добавлено спустя 7 минут 28 секунд:
А под навигацию по RFID меткам можно сделать отдельную тему и там всё нормально обсудить, поскольку условия применения категорически разные.
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Идея навигации сервис-робота для загородного дома
![]() Vorral » 24 янв 2011, 13:03
Vorral » 24 янв 2011, 13:03
А на мой взгляд, обнести дом кучей камер, совсем не плохо. Я например планирую разместить камеры ещё и внутри помещения Плюсов сразу два. Это наличие дополнительной видео информации хозяину дома и возможность управлять не только одним роботом.
Плюсов сразу два. Это наличие дополнительной видео информации хозяину дома и возможность управлять не только одним роботом.- Vorral
- Сообщения: 873
- Зарегистрирован: 11 сен 2008, 17:18
- Откуда: Москва
- прог. языки: Delphi
- ФИО: Владислав
Re: Идея навигации сервис-робота для загородного дома
![]() frig » 24 янв 2011, 13:08
frig » 24 янв 2011, 13:08
А под навигацию по RFID меткам можно сделать отдельную тему и там всё нормально обсудить
эти обсуждения вечно выходят в какие-то бессмысленные споры с тратой кучи времени. я пас.
Vorral, камеры это хорошо, конечно, я тоже бы не против. Но ограничений многовато как для управления. Для наблюдения - норм.
- frig
- Сообщения: 1640
- Зарегистрирован: 12 фев 2007, 12:25
- Откуда: Днепр
Re: Идея навигации сервис-робота для загородного дома
![]() =DeaD= » 24 янв 2011, 13:23
=DeaD= » 24 янв 2011, 13:23
Vorral писал(а):А на мой взгляд, обнести дом кучей камер, совсем не плохо.
Это совершенно другой подход с гораздо большей ценой решения. В том числе на сверление дыр везде и прокладку кабелей (хотя-бы питания).
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Идея навигации сервис-робота для загородного дома
![]() EDV » 24 янв 2011, 13:44
EDV » 24 янв 2011, 13:44
Я когда осенью тачкой вывозил листья за двор, подумал, что это мог бы сделать и робот, работающий на базе такого алгоритма:
-

EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Re: Идея навигации сервис-робота для загородного дома
![]() =DeaD= » 24 янв 2011, 15:16
=DeaD= » 24 янв 2011, 15:16
2EDV - безусловной твой алгоритм даёт какое-то решение этой же задачи, вопрос только в точности, которую он сможет дать. Можешь сейчас как-то оценить для какой-то ситуации?
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Идея навигации сервис-робота для загородного дома
![]() EDV » 24 янв 2011, 15:48
EDV » 24 янв 2011, 15:48
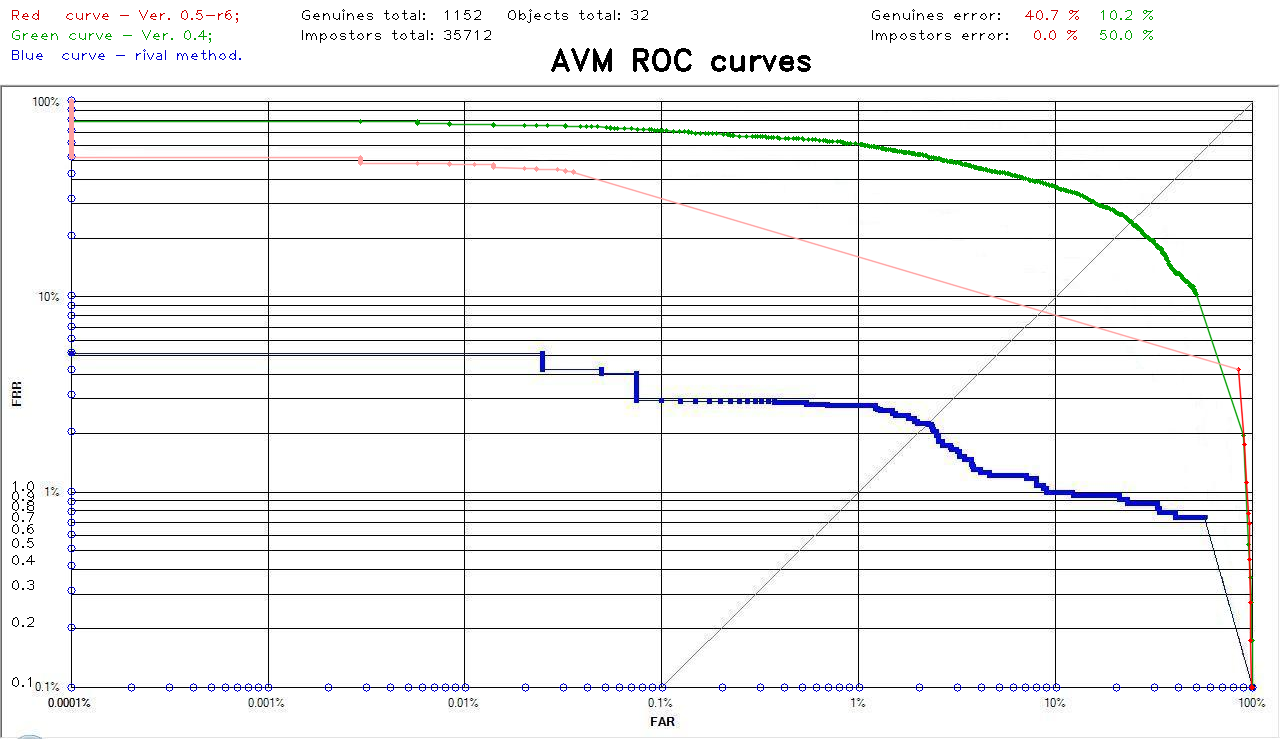
Не очень понимаю, что имеется в виду под точностью. Я подсчитывал для AVM v0.5 только точность распознавания на наборах изображений 32-х и 64-х различных объектов, и точность распознавания получилась:
- процент ошибок прямых срабатываний (должно сработать, но не сработало) 40 %;
- процент ошибок ложных срабатываний (не должно сработать, но сработало) 0.04%.
Result of AVM testing:
http://edv-detail.narod.ru/AVM_v0-5_ROC_curves_obj_32.png
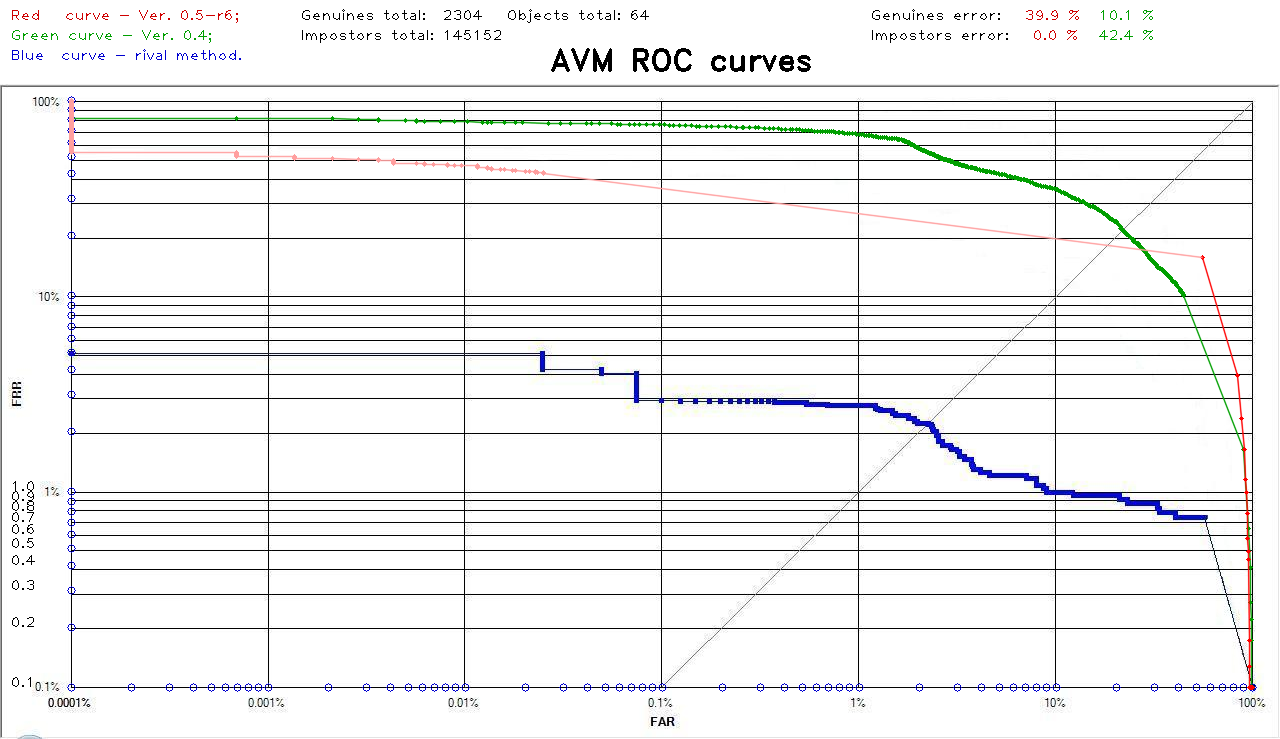
http://edv-detail.narod.ru/AVM_v0-5_ROC_curves_obj_64.png
Для того, что бы робот смог в эксперименте сгонять туда и обратно AVM запомнила приблизительно 9000 изображений (маяков).
- процент ошибок прямых срабатываний (должно сработать, но не сработало) 40 %;
- процент ошибок ложных срабатываний (не должно сработать, но сработало) 0.04%.
Result of AVM testing:
http://edv-detail.narod.ru/AVM_v0-5_ROC_curves_obj_32.png
{kind=link}
http://edv-detail.narod.ru/AVM_v0-5_ROC_curves_obj_64.png
{kind=link}
Для того, что бы робот смог в эксперименте сгонять туда и обратно AVM запомнила приблизительно 9000 изображений (маяков).
-
EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Re: Идея навигации сервис-робота для загородного дома
![]() =DeaD= » 24 янв 2011, 15:50
=DeaD= » 24 янв 2011, 15:50
Точность позиционирования робота на карте в метрах.
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Re: Идея навигации сервис-робота для загородного дома
![]() EDV » 24 янв 2011, 16:00
EDV » 24 янв 2011, 16:00
Там в роликах на полу лежит ватман формата A1, который в экспериментах показывает границы контрольных точек. Ну и робот вначале успешно «заезжает» на ватман с пометкой №1 а затем возвращается на ватман с пометкой №2. За начальную точку можно принять центр ватмана, ну и поглядеть насколько робот от центра ватмана отклонился.
-
EDV - Сообщения: 1016
- Зарегистрирован: 06 июн 2007, 15:19
- Откуда: Украина, Лисичанск
- ФИО: Дмитрий Еремеев
Re: Идея навигации сервис-робота для загородного дома
![]() =DeaD= » 24 янв 2011, 17:14
=DeaD= » 24 янв 2011, 17:14
А можно назвать абсолютные цифры?
-
=DeaD= - Сообщения: 24218
- Зарегистрирован: 06 окт 2004, 18:01
- Откуда: Ебург
- прог. языки: C++ / PHP / 1C
- ФИО: Антон Ботов
Сообщений: 63
• Страница 3 из 5 • 1, 2, 3, 4, 5
Вернуться в Домашняя автоматизация
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0