Технический форум по робототехнике.
citizen » 22 фев 2015, 00:57
Записал данные при поездке по квартире. В этот раз rosbag был запущен на Raspberry Pi.
Как ни странно, такой bag файл Hector SLAM нормально обработал и без фильтрации, хотя карту несколько перекашивало, после чего Hector через некоторое время восстанавливал правильное положение робота:
А вот при попытке использовать фильтр карта стабильно рушилась. Если постоянно приостанавливать воспроизведение bag файла - то не рушилась.
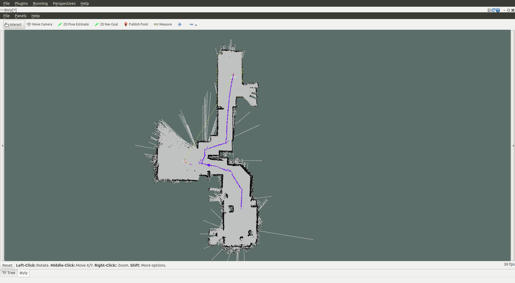
Вот такая карта, если воспроизводить с начала (одну из комнат перекосило, когда робот въезжал в нее):
Если воспроизводить из середины, то не так перекашивает:
- Вложения
-
 test2.zip
test2.zip- (1.11 МиБ) Скачиваний: 0
sned » 22 фев 2015, 20:14
Чайник в ROS.Если не трудно обьясните популярно как получаются эти карты и что такое bag файл.Траектория обхода задается в ручную?
citizen » 23 фев 2015, 00:41
Как карта строится, я показывал здесь:
post318562.html#p318562В ROS запускается пакет hector slam, он принимает данные од дальномера на роботе, и строит карту. У меня сейчас управление роботом либо полностью ручное (с клавиатуры в реальном времени), либо как на видео - робот едет прямо в указанную точку, не обращая внимания на препятствия.
bag файл - файл, в который пишутся определенные данные из ROS, позже их можно воспроизвести.
Кое-что здесь есть:
http://robocraft.ru/blog/technology/702.html
sned » 23 фев 2015, 08:59
На мой взгляд невозможно добиться приемлемых результатов построения карты "на ходу".Во время движения постоянно меняются координаты робота и привязка скана к текущим координатам связана c большими погрешностями.Единственный
путь это движение робота с остановками во время которых формировать качественный скан(а для наших лидаров это особенно актуально) и привязка его к ранее построенной части карты.Насколько я понимаю ROS так не умеет?
Чугунный Дятел » 24 фев 2015, 12:59
Эта сумка куда лучше

Запускали без исправления искажений (до сих пор ещё не сделал как надо).
citizen » 24 фев 2015, 13:37
Ого! Ваш SLAM работает просто отлично!
Карта получилась совсем без перекосов, у меня с hector slam так никогда не выходило.
CrocToy » 25 фев 2015, 06:49
Уважаемый Citizen, я работаю над проектом очень похожим на Ваш, только немного сложнее, а знаний у меня очевидно намного меньше чем у Вас. За то, судя по Вашим описаниям, у меня гораздо больше возможностей с покупкой всевозможных деталей. Мой проект не серкетный, его можно освещать в этом блоге, если желаете, но я очень хотел бы с Вами связаться лично и конкретно задать вопрос по своему проекту. Моя почта это мое лого, croctoy, а посылать мне на gmail.
Спасибо
soswow » 05 апр 2015, 02:44
Citizen, я все 36 страниц не перечитывал (но много из них), но я не видел, что бы вы обсуждали, трендовый LIDAR Lite
https://www.sparkfun.com/products/13167 Любопытно знать что вы думаете о нем со своей колокольни, пройдя весь этот путь.
citizen » 05 апр 2015, 13:01
На самом деле, обсуждали:
post294345.html#p294345Как я уже говорил, для квадракоптеров хорошо подходит высоту определять, для роботов - обнаруживать препятствия перед собой. Сканирование на этом дальномере реализовать проблематично - скорость измерений слишком маленькая.
soswow » 06 апр 2015, 00:46
Время измерения - 0.05с, что соответствует частоте 20Гц, так что сканер не сделать.
Вы это ответили в прошлый раз. Но сейчас в спеке сказано 100Гц. Меняет ли это что-либо? + Напомните, какова скорость вашего решения?
Update:Почитав подробнее становиться понятно, что скорость увеличивается за счёт точности и 100Гц - это максимум, после которого точность падает настолько что уже не ахти (создатели говоря)
citizen » 06 апр 2015, 01:11
У меня измерения делаются каждый градус и скорость вращения - 3об/сек. Получается более 1000 измерений в секунду. И этого не хватает для hector slam.
linvinus » 29 апр 2015, 14:20
citizen, Этот ролик (И другие его работы) видели?
https://www.youtube.com/watch?v=n0fW3Uh_kGA
robolom » 29 ноя 2015, 14:25
Всем привет.
Прошу прощения, если не в кассу. Вижу тут все уже дошли до фазы отладки, а я пока на стадии сборки устройства.
Citizen, Вы сказали, что использовали лазерную голову от DVD привода, потому что у обычного 5mw лазера не хватает мощности. Но, у меня именно он и есть (типа вот такого дешевого лазера
http://chipster.ru/catalog/optic/laser/2606.html), и я хотел бы именно его задействовать.
Так вот вопрос: Вам не хватило именно мощности или в реальности не удалось его модулировать с нужной частотой?
Вообще я правильно понимаю, что модуляция осуществляется просто подачей питания на лазерный диод, а питание в свою очередь есть синусоида 10 МГц ???
Заранее благодарен за ответ!
citizen » 30 ноя 2015, 17:46
Во второй версии дальномера я использовал китайский лазерный модуль 780 нм 3-5 мВт. Указанный вами модуль тоже можно использовать.
Я питал свой лазер с двух ножек МК (соединены параллельно для увеличения мощности).
Никаких 10 МГц там нет, частота около 1 кГц.
Лазер от DVD использовался в первой версии дальномера, там была менее чувствительная линейка.
oxid » 30 ноя 2015, 19:51
Привет!
А кто-нибудь пробовал вместо точки использовать лазерную линию? Вероятно здесь будет нужна не линейка из фотодиодов, а какая-то камера.
Но кажется что скорость сканирования можно будет значительно увеличить, так как будет определяться расстояние до каждой точки составляющей линию.
