Duhas писал(а):спс за инфу по терминалам.
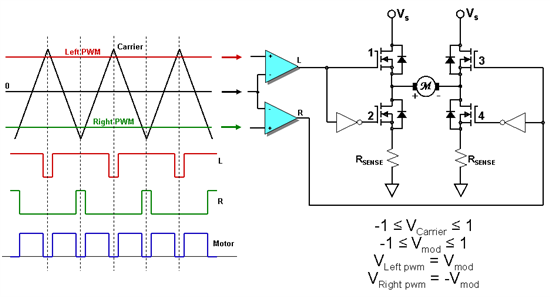
по управлению мостом - да, по сути так. в течение одного периода ШИМ двигатель подключается то одной диагональю, то другой..
нет проблем.
ну не совсем по очереди,
вот он в деталях
http://e2e.ti.com/cfs-file.ashx/__key/t ... toring.gif
http://e2e.ti.com/cfs-file.ashx/__key/t ... rating.gif
суть того метода, что я привёл, в том что (грубо говоря) при шим 128 мотор будет стоять, при меньшем значении мотор будет крутиться в одну сторону а при большем в другую, всё управление происходит через одну переменную.
Во первых это офигенно удобно в ПИД регуляторах, если мы понижаем шим во времени, то происходит регенерация и как следствие быстрое торможение,
вы избавляетесь от необходимости специального режима торможения, всё происходит само собой.
и не нужно обрабатывать ситуацию с отрицательными значениями шим(это естественно для этого метода управления (подразумевается что 128 это 0)).
во вторых такой шим удваивает частоту на двигателе, т.е. например шим 16кгц а на двигателе реально будет 32кгц. (но ключи по прежнему переключаются на 16Кгц так что никакого увеличения потерь)
В общем, если у вас не так то советую вникнуть и попробовать этот метод управления это лучшее что я видел.
Единственный "недостаток" наличие в контроллер комплементарных выходов с аппаратным dead-time.




 но я уже передумал.
но я уже передумал.

 ) проявится так:
) проявится так:{kind=link}
{kind=link}
{kind=link}