Угу, она и должна... getchar
возвращается только когда получит очередной байт, а ежели его нет, так и висим )
Значит нужно использовать прерывания для ввода-вывода...
или как вариант - ввод-вывод оставить основным потоком, а логику программы запустить в фоне, например тактируя ее прерывниями таймера...
| |
roboforum.ruТехнический форум по робототехнике. |
|
AVR-MT-128_энкодер_продолжение
Re: AVR-MT-128_ прием данных с PC
![]() megaMike » 13 сен 2010, 09:47
megaMike » 13 сен 2010, 09:47
- megaMike
- Сообщения: 20
- Зарегистрирован: 28 авг 2010, 02:20
- Откуда: Москва
- прог. языки: С, С++, Lua, ActionScript
Re: AVR-MT-128_энкодер_продолжение
![]() CiSi » 27 ноя 2010, 17:40
CiSi » 27 ноя 2010, 17:40
Продоржаю тему подключения энкодера ЛИР к контроллеру.
Немного истории: предидущее подключение энкодера было "прямым", датчик напрямую подключался к контроллеру и сигналы считались от прерывания (счетчик был реверсивным), однако счет был неверным так как в датчике наблюдался дребизг.
параметры:
мах. частота вращения вала на который закреплен датчик: 5000 об/мин
датчик: 2500 имп. на оборот
частота работы мк: 16МГц
Что хочется сделать теперь:
1. Избавиться от дребизга и осуществить реверс
2. Использовать Для счета таймер/счетчик
3. Исбользовать в качестве контроллера Xmega c частотой работы в 32МГц, так как помимо счета надо выполнять еще и другие операции.
==================================
начнем с пункта №1.
Для избежания дребизга планируется использовать оптопары, то есть каждый сигнал канала будет проходить через свою оптопару. Кто что об этом думает? Как лучше избавиться от дребезга? Аппаратно или программно?
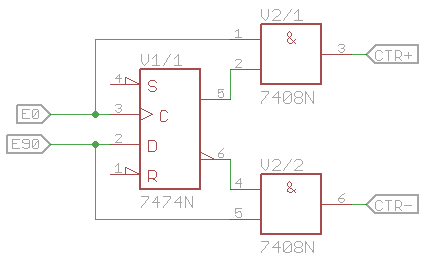
Реверс планирую осушествить добаврением к схеме двух корпусов логики триггера и элемента "И". схема приведенная blindman неработает (точнее работает но неправильно, forum2/topic7998-15.html )
янемного ее переделал:

Жду коментариев, предложений?
Немного истории: предидущее подключение энкодера было "прямым", датчик напрямую подключался к контроллеру и сигналы считались от прерывания (счетчик был реверсивным), однако счет был неверным так как в датчике наблюдался дребизг.
параметры:
мах. частота вращения вала на который закреплен датчик: 5000 об/мин
датчик: 2500 имп. на оборот
частота работы мк: 16МГц
Что хочется сделать теперь:
1. Избавиться от дребизга и осуществить реверс
2. Использовать Для счета таймер/счетчик
3. Исбользовать в качестве контроллера Xmega c частотой работы в 32МГц, так как помимо счета надо выполнять еще и другие операции.
==================================
начнем с пункта №1.
Для избежания дребизга планируется использовать оптопары, то есть каждый сигнал канала будет проходить через свою оптопару. Кто что об этом думает? Как лучше избавиться от дребезга? Аппаратно или программно?
Реверс планирую осушествить добаврением к схеме двух корпусов логики триггера и элемента "И". схема приведенная blindman неработает (точнее работает но неправильно, forum2/topic7998-15.html )
янемного ее переделал:
Жду коментариев, предложений?
-

CiSi - Сообщения: 1027
- Зарегистрирован: 04 окт 2007, 16:11
- Откуда: иваново
- Skype: cybsys1
- прог. языки: Delphi
- ФИО: Павел
Re: AVR-MT-128_энкодер_продолжение
![]() Duhas » 27 ноя 2010, 18:03
Duhas » 27 ноя 2010, 18:03
я бы начал с Хмеги... а там и остальное проясниться
по дребезгу - т.е. по твоему выходные сигналы энкодера дребезжат? или все-таки при их чтении косяки ? возможно тебе из-за низкой скорости чтения сложно успеть считать дрожжание на 1 импульс.. + какой у тебя выход у энкодера и и схему подключения.. или она была приведена выше ?
по дребезгу - т.е. по твоему выходные сигналы энкодера дребезжат? или все-таки при их чтении косяки ? возможно тебе из-за низкой скорости чтения сложно успеть считать дрожжание на 1 импульс.. + какой у тебя выход у энкодера и и схему подключения.. или она была приведена выше ?
-

Duhas - Сообщения: 6338
- Зарегистрирован: 15 сен 2007, 13:03
- Откуда: Красноярск
- прог. языки: ASM(МК), C(PC)
- ФИО: Гагарский Андрей Александрович
Re: AVR-MT-128_энкодер_продолжение
![]() CiSi » 27 ноя 2010, 18:28
CiSi » 27 ноя 2010, 18:28
У нас в городе такие контроллеры непродаются, если только на заказ, заказывать все равно придется, но это долгая история.
По моему дребезжат выходные сигналу энкодера, при чтении врядли (там все просто).
Выход энкодера TTL. Включение такое: Один канал энкодера подключен к прерыванию, а второй на простой пин, он то как раз и определял реверс. Оба канала идентичны, один из них просто смещен по фазе.
По моему дребезжат выходные сигналу энкодера, при чтении врядли (там все просто).
Выход энкодера TTL. Включение такое: Один канал энкодера подключен к прерыванию, а второй на простой пин, он то как раз и определял реверс. Оба канала идентичны, один из них просто смещен по фазе.
-
CiSi - Сообщения: 1027
- Зарегистрирован: 04 окт 2007, 16:11
- Откуда: иваново
- Skype: cybsys1
- прог. языки: Delphi
- ФИО: Павел
Re: AVR-MT-128_энкодер_продолжение
![]() Duhas » 27 ноя 2010, 19:37
Duhas » 27 ноя 2010, 19:37
я сам так делал. тоже были глюки..
ЛИР-ы вроде неплохи по качеству... мой с дифф выходом судя по осциллографу делает все правильно и дребезга там не видно..
Хмегу мона начать юзать с симулятора..
ЛИР-ы вроде неплохи по качеству... мой с дифф выходом судя по осциллографу делает все правильно и дребезга там не видно..
Хмегу мона начать юзать с симулятора..
-
Duhas - Сообщения: 6338
- Зарегистрирован: 15 сен 2007, 13:03
- Откуда: Красноярск
- прог. языки: ASM(МК), C(PC)
- ФИО: Гагарский Андрей Александрович
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0