| |
roboforum.ruТехнический форум по робототехнике. |
|
AVR-MT-128_энкодер_продолжение
-

Duhas - Сообщения: 6338
- Зарегистрирован: 15 сен 2007, 13:03
- Откуда: Красноярск
- прог. языки: ASM(МК), C(PC)
- ФИО: Гагарский Андрей Александрович
-

CiSi - Сообщения: 1027
- Зарегистрирован: 04 окт 2007, 16:11
- Откуда: иваново
- Skype: cybsys1
- прог. языки: Delphi
- ФИО: Павел
Re: AVR-MT-128
![]() Duhas » 19 май 2010, 14:31
Duhas » 19 май 2010, 14:31
ну вариантов несколько.. например такт с МК с XTAL2 .. или один из таймеров на ШИМ с TOP-ом = 2 или 3 и сравнением на 1 .. без предделителя ... будет что-то типа такт/4 ... вроде мона так )
-
Duhas - Сообщения: 6338
- Зарегистрирован: 15 сен 2007, 13:03
- Откуда: Красноярск
- прог. языки: ASM(МК), C(PC)
- ФИО: Гагарский Андрей Александрович
Re: AVR-MT-128
![]() CiSi » 19 май 2010, 17:18
CiSi » 19 май 2010, 17:18
А какая частота тактирования нужна? И можно ли подключить отдельный кварц?
Ну а проще наверное будет микруху соединить с XTAL2 МК.
Ну а проще наверное будет микруху соединить с XTAL2 МК.
-
CiSi - Сообщения: 1027
- Зарегистрирован: 04 окт 2007, 16:11
- Откуда: иваново
- Skype: cybsys1
- прог. языки: Delphi
- ФИО: Павел
Re: AVR-MT-128
![]() Duhas » 19 май 2010, 17:20
Duhas » 19 май 2010, 17:20
кварц поставить не выйдет, нужен генератор.. мона на логике сделать ...
-
Duhas - Сообщения: 6338
- Зарегистрирован: 15 сен 2007, 13:03
- Откуда: Красноярск
- прог. языки: ASM(МК), C(PC)
- ФИО: Гагарский Андрей Александрович
-
CiSi - Сообщения: 1027
- Зарегистрирован: 04 окт 2007, 16:11
- Откуда: иваново
- Skype: cybsys1
- прог. языки: Delphi
- ФИО: Павел
Re: AVR-MT-128
![]() Duhas » 19 май 2010, 18:46
Duhas » 19 май 2010, 18:46
там судя по ДШ ета частота используется для цифровой фильтрации.. т.е. для избавления от дребезга всякого и тд ..
она нужна в 3-4 раза большая чем частота импульсов с энкодера будет ...
она нужна в 3-4 раза большая чем частота импульсов с энкодера будет ...
-
Duhas - Сообщения: 6338
- Зарегистрирован: 15 сен 2007, 13:03
- Откуда: Красноярск
- прог. языки: ASM(МК), C(PC)
- ФИО: Гагарский Андрей Александрович
Re: AVR-MT-128_ счетчик внешних событий
![]() CiSi » 10 авг 2010, 12:54
CiSi » 10 авг 2010, 12:54
Сделал счетчик от прерывания, оказалось что такого вполне должно хватить.
Энкодер подключен напрямую к мк без логики т.к. сначало хочется хотябы просто считать импульсы в одном направлении.
Считать то вроде считает но неправильно. после включения питания на дисплее показано 0 импульсов, как и должно быть, а при последующем прикосновении к валу (некрутя его) энкодера, значение с нуля сразу добегает до пары тысяч. И каждый раз значение разное. При вращении вала все время в одном направлении може быть даже отрицательное значение на дисплее.
Вопрос: что за глюк?
Добавлено спустя 1 минуту 31 секунду:
Энкодер подключен напрямую к мк без логики т.к. сначало хочется хотябы просто считать импульсы в одном направлении.
Считать то вроде считает но неправильно. после включения питания на дисплее показано 0 импульсов, как и должно быть, а при последующем прикосновении к валу (некрутя его) энкодера, значение с нуля сразу добегает до пары тысяч. И каждый раз значение разное. При вращении вала все время в одном направлении може быть даже отрицательное значение на дисплее.
Вопрос: что за глюк?
Добавлено спустя 1 минуту 31 секунду:
- Код: Выделить всё • Развернуть
#include<mega128.h>
#include <delay.h>
#include <stdlib.h>
#include <stdio.h>
#include <lcd.h>
#asm
.equ __lcd_port=0x15 ;PORTC
#endasm
unsigned long q;
interrupt [EXT_INT0] void ext_int0_isr(void) // процедура обработки прерывания
{
q++; //с каждым прерыванием значение переменной увеличивается на 1
}
int main()
{
char w[32]; //для преобразования числа в строку/символы
DDRA=0x00;
PORTA=0x00;
DDRB=0xF0;
PORTB=0x00;
DDRE = 0b00110000;
PORTE = 0b00100000;
lcd_init(16);
lcd_gotoxy(5,0);
lcd_putsf("Hello!");
Privet();
delay_ms(3000);
while(1) {
q=0;
lcd_clear();
Go();
lcd_putsf(" ");
Stop();
lcd_putsf(" ");
Reset();
delay_ms(10);
if (!(PINA & 0b00000001)) { //Пуск
lcd_clear();
Go();
delay_ms(1000);
SREG.7 = 1;
EIMSK = 0x01;
EICRA = 0x0C;
EICRB = 0x0C;
while(PINA & 0b00000100){ //Сброс
lcd_clear();
sprintf(w,"adc= %d\n",q);
lcd_puts(w);
delay_ms(50);
}
lcd_clear();
Reset();
delay_ms(2000);
}
}
return 0;
}
-
CiSi - Сообщения: 1027
- Зарегистрирован: 04 окт 2007, 16:11
- Откуда: иваново
- Skype: cybsys1
- прог. языки: Delphi
- ФИО: Павел
Re: AVR-MT-128_ счетчик внешних событий
![]() Сергей » 10 авг 2010, 13:01
Сергей » 10 авг 2010, 13:01
Код невозможно прочесть. Навскидку скажу, что это может быть от помех, посмотри осциллографом твои импульсы с энкодера. У меня было такое однажды.
- Сергей
- Сообщения: 3744
- Зарегистрирован: 29 дек 2004, 23:15
- Откуда: Санкт-Петербург
- прог. языки: C, C++, C#, Asm
- ФИО: Кашликов Сергей
Re: AVR-MT-128_ счетчик внешних событий
![]() CiSi » 11 авг 2010, 10:45
CiSi » 11 авг 2010, 10:45
Изменил изменил условия внешних прерываний на на "условие 1/0" и внутреннюю подтяжку включил - все заработало НО! Теперь надо органировать реверс, а как это сделать? Наверное придется использовать сдвиг фаз двух каналов. А как это можно сделать програмно?
Пробовал собирать предложенную схему blindman-ом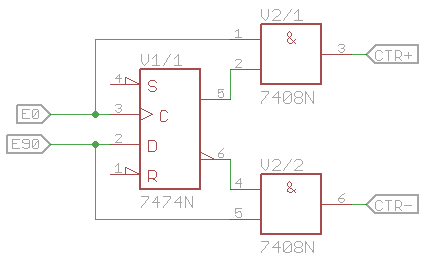
, но устройство работало неправильно, значение все время прыгало.
Пробовал собирать предложенную схему blindman-ом
, но устройство работало неправильно, значение все время прыгало.
-
CiSi - Сообщения: 1027
- Зарегистрирован: 04 окт 2007, 16:11
- Откуда: иваново
- Skype: cybsys1
- прог. языки: Delphi
- ФИО: Павел
Re: AVR-MT-128_ реверс на энкодере
![]() CiSi » 19 авг 2010, 15:43
CiSi » 19 авг 2010, 15:43
Подключал даже подтяжку к SR, но безрезультатно 
-
CiSi - Сообщения: 1027
- Зарегистрирован: 04 окт 2007, 16:11
- Откуда: иваново
- Skype: cybsys1
- прог. языки: Delphi
- ФИО: Павел
Re: AVR-MT-128_ реверс на энкодере
![]() Duhas » 20 авг 2010, 13:57
Duhas » 20 авг 2010, 13:57
можно описать доступно - для масс (ну или для меня) что подразумевается под "Теперь надо органировать реверс"?
желательно полно, с того места откуда проистекает задача...
желательно полно, с того места откуда проистекает задача...
-
Duhas - Сообщения: 6338
- Зарегистрирован: 15 сен 2007, 13:03
- Откуда: Красноярск
- прог. языки: ASM(МК), C(PC)
- ФИО: Гагарский Андрей Александрович
Re: AVR-MT-128_ реверс на энкодере
![]() CiSi » 20 авг 2010, 19:44
CiSi » 20 авг 2010, 19:44
Требовалось не только прибавлять импульсы при вращении в одну сторону, а еще их и убавлять при вращении вала энкодера в другую сторону.
К счастью проблемму сегодня решит, исключительно программно. вроде работает!
К счастью проблемму сегодня решит, исключительно программно. вроде работает!
-
CiSi - Сообщения: 1027
- Зарегистрирован: 04 окт 2007, 16:11
- Откуда: иваново
- Skype: cybsys1
- прог. языки: Delphi
- ФИО: Павел
Re: AVR-MT-128_ реверс на энкодере
![]() Duhas » 20 авг 2010, 19:55
Duhas » 20 авг 2010, 19:55
дык естественно тут все решается исключительно программно.. либо аппаратно - если поддержка "квадратурного интерфейса" есть..
-
Duhas - Сообщения: 6338
- Зарегистрирован: 15 сен 2007, 13:03
- Откуда: Красноярск
- прог. языки: ASM(МК), C(PC)
- ФИО: Гагарский Андрей Александрович
Re: AVR-MT-128_ реверс на энкодере
![]() CiSi » 10 сен 2010, 18:02
CiSi » 10 сен 2010, 18:02
Возникла очередная проблемка, да бы не создавать новую тему и не захламлять форум, задам вопрос тут: Данные с датчика требуется отправлять на комп - с этой задачей с горем на пополам справился. Так же требуется кое какие данные отправлять на внешнее устройство, обмен данными ведется через интерфейс 232 по USART, но вот эту задачу почему то не удается реализовать.При использовании процедуры getchar() программа виснет. помогите плиз.
-
CiSi - Сообщения: 1027
- Зарегистрирован: 04 окт 2007, 16:11
- Откуда: иваново
- Skype: cybsys1
- прог. языки: Delphi
- ФИО: Павел
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0