Хех, интересная штуковина. По спекам процессор должен уметь аппаратно H264 видео кодировать. Я всё порываюсь сделать под ROS плагин для ImageTransport, который аппаратно видео жмёт (video4linux2), но со временем беда, и руки всё не добираются.
На просторах форума odroid можно найти описание, как собирать PCL/OpenNI на ARM. С некоторыми махинациями можно так и до навигации дойти.
roboforum.ru
Технический форум по робототехнике.
ROS — ос для робота
Re: ROS — ос для робота
Сейчас у китайцев таких игрушек - валом. 750 рур - это мне повезло, конечно, но по $50 можно очень вкусные игрушки покупать.
Re: ROS — ос для робота
Вторая инкарнация. Все тот же недособранный LEGO GRIPP3R.
На борту перешитый MK808(коробочка с надписью MINI TV). Питается от ЛЕГО по одному USB шнурку, управляет им же по другому такому же.
Запущен линукс Linaro 14.4 developer, на нем развернут ROS Indigo. На java написана аппликация, в ней запускается мастер-узел ROS, узел управления собственно ЛЕГО, а так же крошечный узел с веб-сервером, выводящий немного телеметрии с борта и позволяющий управлять всем этим с джойстика или клавиатуры.
С борта идет одометрия(леговские моторы это легко позволяют), которая отображается стандартной программой rviz.
На борту перешитый MK808(коробочка с надписью MINI TV). Питается от ЛЕГО по одному USB шнурку, управляет им же по другому такому же.
Запущен линукс Linaro 14.4 developer, на нем развернут ROS Indigo. На java написана аппликация, в ней запускается мастер-узел ROS, узел управления собственно ЛЕГО, а так же крошечный узел с веб-сервером, выводящий немного телеметрии с борта и позволяющий управлять всем этим с джойстика или клавиатуры.
С борта идет одометрия(леговские моторы это легко позволяют), которая отображается стандартной программой rviz.
Re: ROS — ос для робота
Понравилась эта штуковина, думаю такую же приобрести для своего лунохода. Хочется двигаться в сторону ROS. Я так понимаю, у неё два USB-порта (третий для питания) работают в режиме хоста, только к одному внешние девайсы цепляются через OTG-шнурок, так? Непонятка с блютусом - он есть или его нет? По USB, я думаю, можно прицепить USB-COM на PL2303? То что тебе его удалось перешить на линух - это гудelmot писал(а):Удалось перешить мелкий ARM девайс из андроида в классический линукс и установить там базовый ROS.
Процессор RK3066, 1000-1600MHz, 2 ядра, 1G RAM, 1xUSB/OTG+1xUSB Host, карточка micro-sd, wifi. Купил на авито за 750 рур.
Не без граблей, но все-таки успешно запустилась библиотека управления датчиками и моторами LEGO EV3 через USB.
Еще удалось прицепить к нему веб-камеру и получить с нее изображение.
Осталось это все поженить и выложить на опенсорц.
 А на ведроид базовый ROS не пробовал установить? У Димы Дзахова (http://www.robot-mitya.ru/blog/) неплохо получилось накатить базовый ROS на андроид-смартфон, а на андроид-планшете управлять всем этим делом и принимать картинку в реальном времени.
А на ведроид базовый ROS не пробовал установить? У Димы Дзахова (http://www.robot-mitya.ru/blog/) неплохо получилось накатить базовый ROS на андроид-смартфон, а на андроид-планшете управлять всем этим делом и принимать картинку в реальном времени.ЗЫ. сейчас сделал управлялку с наэкранным виртуальным джойстиком под ведроид для Blutle, немного допилю и выложу сырцы в соответствующей теме.
Re: ROS — ос для робота
elmot писал(а):Осталось это все поженить и выложить на опенсорц.
Выложил, отписался в росовскую рассылку.
http://sourceforge.net/projects/ev3javabrick/
https://groups.google.com/forum/#!topic ... NZJI0lWGv8
Понравилась эта штуковина, думаю такую же приобрести для своего лунохода. Хочется двигаться в сторону ROS. Я так понимаю, у неё два USB-порта (третий для питания) работают в режиме хоста, только к одному внешние девайсы цепляются через OTG-шнурок, так?
Примерно так. У нее 3 порта - один питание(minuUSB), один OTG(minuUSB, именно mini), один просто хост(большой плоский USB разъем). Моя программа под линуксом через OTG не хочет работать, а через просто хост - без проблем.
Непонятка с блютусом - он есть или его нет?
У штуковины есть несколько версий и клоны. Различаются наличием блютуза и разными вайфай чипами. В моем БТ нету(не очень-то и хотелось).
По USB, я думаю, можно прицепить USB-COM на PL2303?
Скорее всего да. В крайнем случае придется ядро пересобрать, но это не архисложно. Я цеплял вебкамеру, клавиатуры-мыши, через хаБ, не через хаб - все работало.
То что тебе его удалось перешить на линух - это гуд
Нет, зашел со стороны втыкания планшета и андроидной аппликухи на rosjava.
http://sourceforge.net/p/ev3javabrick/wiki/Android%20version/
ЗЫ. сейчас сделал управлялку с наэкранным виртуальным джойстиком под ведроид для Blutle, немного допилю и выложу сырцы в соответствующей теме.
Хачу. Даже не для blutle, а сюда.
Re: ROS — ос для робота
Если нужна управлялка сюда, то лучше посмотреть исходники Димы. Я на днях приобрёл "за бутылку" HTC Desire V с потрескавшимся стеклом и без верхней рамки корпуса, но рабочий. Хачу теперь его поставить в качестве мозгов для лунатика, и накатить туда ROS.elmot писал(а):ЗЫ. сейчас сделал управлялку с наэкранным виртуальным джойстиком под ведроид для Blutle, немного допилю и выложу сырцы в соответствующей теме.
Хачу. Даже не для blutle, а сюда.
Вот аппликуха Димы для "мозгов" тележки https://play.google.com/store/apps/deta ... a.robohead
а это управлялка для "мозгов" https://play.google.com/store/apps/deta ... .roboboard
при этом у него ядро ROS установлено на тележке (на смартфоне), что есть гуд, т.к. тележка может быть полностью автономной.
Re: ROS — ос для робота
AndreW82 писал(а):Если нужна управлялка сюда, то лучше посмотреть исходники Димы. Я на днях приобрёл "за бутылку" HTC Desire V с потрескавшимся стеклом и без верхней рамки корпуса, но рабочий. Хачу теперь его поставить в качестве мозгов для лунатика, и накатить туда ROS.elmot писал(а):ЗЫ. сейчас сделал управлялку с наэкранным виртуальным джойстиком под ведроид для Blutle, немного допилю и выложу сырцы в соответствующей теме.
Хачу. Даже не для blutle, а сюда.
Вот аппликуха Димы для "мозгов" тележки https://play.google.com/store/apps/deta ... a.robohead
а это управлялка для "мозгов" https://play.google.com/store/apps/deta ... .roboboard
при этом у него ядро ROS установлено на тележке (на смартфоне), что есть гуд, т.к. тележка может быть полностью автономной.
Симпатяво. Что есть ядро ROS? Мастер-узел? он у меня тоже на телеге.
Судя по исходникам, управлялка на яве. Я хочу не так - хочу веб-сервер на борт и управление через веб-страничку(собственно так уже и есть, но пока очень примитивное все), чтобы управлять мог любой нуб, с любого веб-устройства.
Re: ROS — ос для робота
Вот тут он довольно популярно и кратко всё разложил http://www.robot-mitya.ru/blog/robot-mi ... and-mitya/elmot писал(а):Симпатяво. Что есть ядро ROS? Мастер-узел? он у меня тоже на телеге.
Судя по исходникам, управлялка на яве. Я хочу не так - хочу веб-сервер на борт и управление через веб-страничку(собственно так уже и есть, но пока очень примитивное все), чтобы управлять мог любой нуб, с любого веб-устройства.
Re: ROS — ос для робота
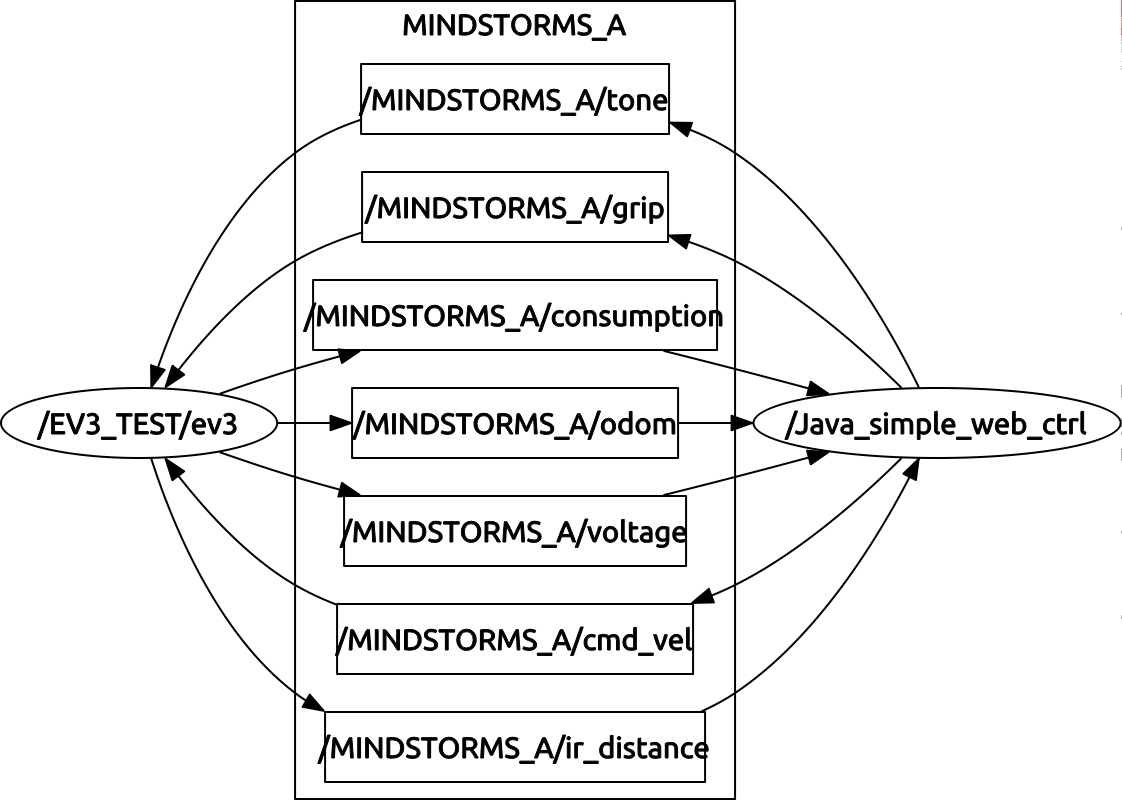
Да, кратенько по делу. Только зачем схему рисовать и так много узлов?
Вот моя схема из rqt_graph.
https://a.fsdn.com/con/app/proj/ev3javabrick/screenshots/rosgraph-ev3.png
Вот моя схема из rqt_graph.
https://a.fsdn.com/con/app/proj/ev3javabrick/screenshots/rosgraph-ev3.png
{kind=link}
Re: ROS — ос для робота
А java вы как подключаете? Через ros_java?
Re: ROS — ос для робота
конечно
Re: ROS — ос для робота
и как? когда я его пробовал, он какой-то недоделанный был... удобно с ним работать?
Re: ROS — ос для робота
В меру удобно. Я не пользуюсь грувями, как там предполагается, просто скидываю в проект мавенские артефакты от ros_java
Re: ROS — ос для робота
а в какой IDE пишите? если Eclipse, не могли бы вы какой-нибудь проект типа "Hello, world" сделать и опубликовать.
буду безмерно благодарен
буду безмерно благодарен
Re: ROS — ос для робота
Не, я идейный.