ну куда тебя девать ))
И ваще не спрашивай - у нас тут и тату-машинки, и лампочки "настольные" USB для клавиатуры...
Вываливай короче.
roboforum.ru
Технический форум по робототехнике.
Павуки (и не только) из разогнутых скрепок и прочего хлама..
Правила форума
В этом форуме новые темы не создаются, однако обсуждение допустимо.
В этом форуме новые темы не создаются, однако обсуждение допустимо.
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
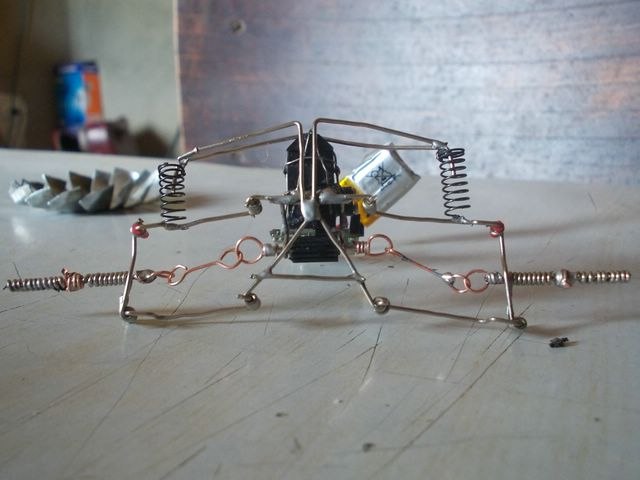
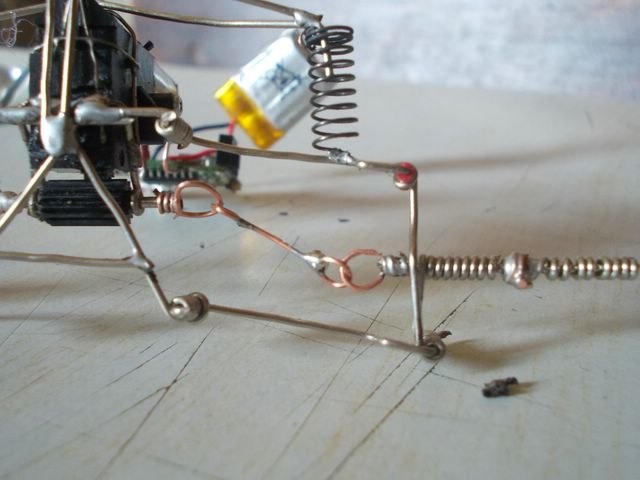

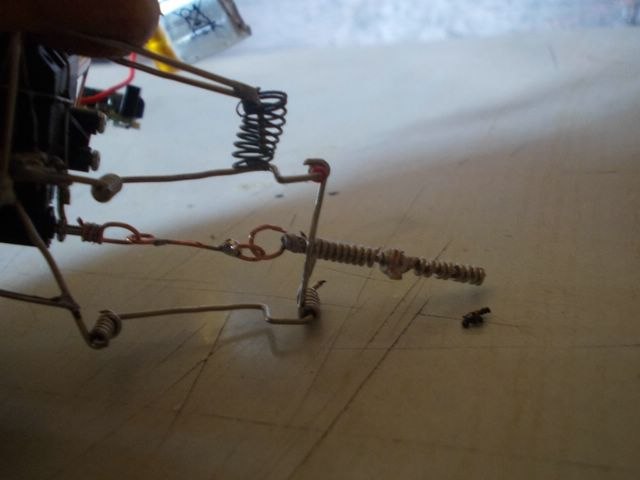
задняя подвеска....
привод мощный но мало оборотистый...
качество атас, было лень немного и мелко слишком

Re: Павуки (и не только) из разогнутых скрепок и прочего хла
И что это за чудо инженерной мысли?
А видео будет?
А видео будет?
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
даа, без видоса никуда ))
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
да будет, но позже, когда доделаю 
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
согни свою ящерку вдоль хребта и поверни ей чуток ножки
а новую машинку былобы хотелось увидеть.
Добавлено спустя 3 минуты 4 секунды:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
Гуру по имени МегаБизон говорил так "согни ножки и чуть-чуть поверни"
а новую машинку былобы хотелось увидеть.
Добавлено спустя 3 минуты 4 секунды:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
Гуру по имени МегаБизон говорил так "согни ножки и чуть-чуть поверни"
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
cjA писал(а):согни свою ящерку вдоль хребта и поверни ей чуток ножки
а новую машинку былобы хотелось увидеть.
Ящера обижать не стану
Ты не поверишь, но думаю у кошмара архитектора появится брат с подвеской..... мощи много у привода аж буксуе при перегруженой подвеске а на полном газу еле плетётся

Re: Павуки (и не только) из разогнутых скрепок и прочего хла
слежу за темой, но видео, наверно не дождаться.... 
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
верим, надеемся ))
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Интересно ))
Тягов не хватает.. но тогда было бы всё перекошено.
Жаль, не в движении - было бы нагляднее некуда.
Тягов не хватает.. но тогда было бы всё перекошено.
Жаль, не в движении - было бы нагляднее некуда.
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
ну так она сама в пояснице из-за раслябоности проседает. не буду давать ссылку на немце, не помню ее, но еслибы у тебя были оси _СТРОГО_ параллельны- ящерка бы просто елозила на месте. Как пример близкого родства-шалтай: у него оси не только неколлинеарны, а ортогональны, а среднии еще и в коленях вывехнуты.. Просто не видно, у тебя наверное что-то среднее, а хвост волочится, как и положено всем ящеркам.
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
так.... у меня оси там перпендикулярны в горизонтальной плоскости.... хвост чисто уравновес, приводиться с башки
Двигается как жук сервачный этот почти
механика коромысло-кулисная
Двигается как жук сервачный этот почти
механика коромысло-кулисная
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Я сейчас доделываю потихоньку каракурта, собираю материал для мануала, но уже начал думать над следующим. Сперва я хотел взяться за Акакия, но потом Мегабизон рассказал, что Акакий не падает только благодаря быстрому шевелению ногами - стороны никак не синхронизированы. Поэтому мне пришла другая идея, критику которой хотелось бы услышать.
Сперва задача: хочу сделать шагающего робота, чтоб он мог ходить, поворачивать, разворачиваться. Кроме этого, нужно чтобы в этом движении был смысл. Пока я придумал четыре задачи для робота:
1. Управление роботом ИК пультом (потом можно будет сделать синий зуб, но вряд ли это сделаю я);
2. Поставить спереди локатор - случайное блуждание без столкновений;
3. Поставить спереди два глаза вверх и в стороны - движение к свету/от света (на мой взгляд скучно);
4. Свести "взгляд" на пол перед собой, чтобы робот бегал за пятном фонарика/лазерной указки.
А теперь сама идея. Суть в следующем: надо чтобы один мотор управлял тройкой ног (две крайние одной стороны и средняя другой стороны) - тогда он будет устойчивым. И чтобы все ноги имели две степени свободы. Помните ЯК-43? Там ведь так и сделано, только эти тройки ног работают от одного мотора в противофазе и всегда в одну сторону. Ставим два мотор-редуктора рядом, на вал только кривошип (место это займет мало), кривошип качает П-образную ось и Г-образный шарнир. На моторы поставить Н-мосты, можно даже ШИМить. Вот такая вот идейка. Прошу высказываться.
Сперва задача: хочу сделать шагающего робота, чтоб он мог ходить, поворачивать, разворачиваться. Кроме этого, нужно чтобы в этом движении был смысл. Пока я придумал четыре задачи для робота:
1. Управление роботом ИК пультом (потом можно будет сделать синий зуб, но вряд ли это сделаю я);
2. Поставить спереди локатор - случайное блуждание без столкновений;
3. Поставить спереди два глаза вверх и в стороны - движение к свету/от света (на мой взгляд скучно);
4. Свести "взгляд" на пол перед собой, чтобы робот бегал за пятном фонарика/лазерной указки.
А теперь сама идея. Суть в следующем: надо чтобы один мотор управлял тройкой ног (две крайние одной стороны и средняя другой стороны) - тогда он будет устойчивым. И чтобы все ноги имели две степени свободы. Помните ЯК-43? Там ведь так и сделано, только эти тройки ног работают от одного мотора в противофазе и всегда в одну сторону. Ставим два мотор-редуктора рядом, на вал только кривошип (место это займет мало), кривошип качает П-образную ось и Г-образный шарнир. На моторы поставить Н-мосты, можно даже ШИМить. Вот такая вот идейка. Прошу высказываться.