{kind=link}

roboforum.ru
Технический форум по робототехнике.
Павуки (и не только) из разогнутых скрепок и прочего хлама..
Правила форума
В этом форуме новые темы не создаются, однако обсуждение допустимо.
В этом форуме новые темы не создаются, однако обсуждение допустимо.
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
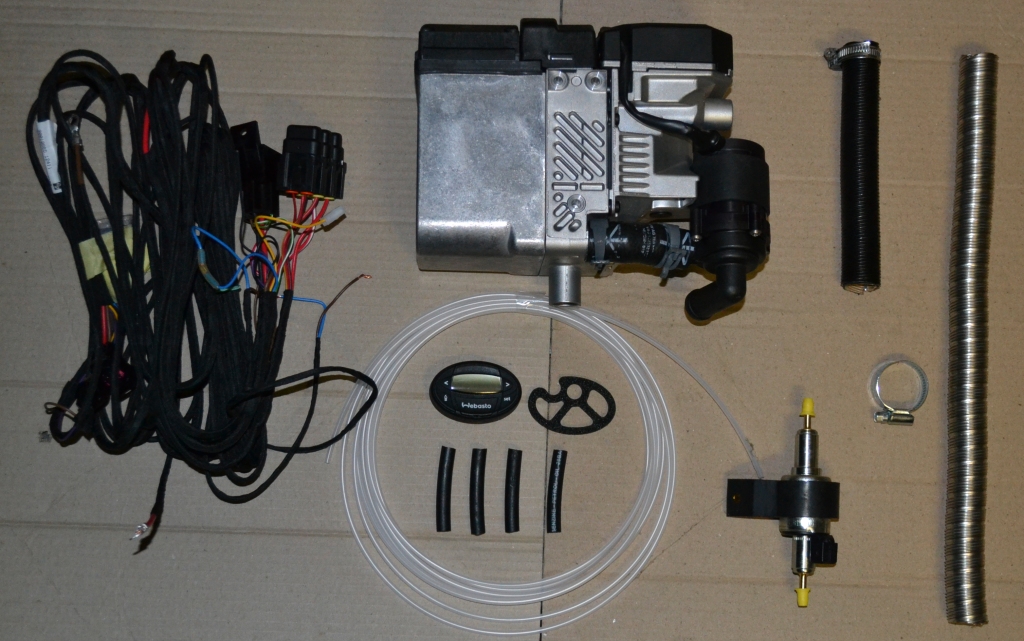
Это нарезаная пластиковая трубочка из комплекта гидроника (на картинке свёрнутая такая) - системы подогрева двигателя. На работе метрами валялись, вот и пришлась ко двору
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
2 Dmitry__ - на каждый мотор еще придется по драйверу шаговика повесить (~100p.)
Покрутите их в руках, по весельному принципу дагадаетесь как ножки приделать, а учитывая что их шесть и каждый отдельно крутится- должно неплохо получится. (если одной меги не хватит- с удовольствием приму участие в обсуждени бота с двумя мозгами.)
2 kolDOOM - даже если не пойдет- на буфет поставить- уже красиво.
Покрутите их в руках, по весельному принципу дагадаетесь как ножки приделать, а учитывая что их шесть и каждый отдельно крутится- должно неплохо получится. (если одной меги не хватит- с удовольствием приму участие в обсуждени бота с двумя мозгами.)
2 kolDOOM - даже если не пойдет- на буфет поставить- уже красиво.
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Спасибо за ответ.
Я вот щас тоже решил Каракурта сделать, платформа уже готова осталось только ноги прилепить )
Я вот щас тоже решил Каракурта сделать, платформа уже готова осталось только ноги прилепить )
- Вот фото платформы
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Dmitry__ писал(а):Из cd-rom шаговики линейные. Нет идей как паукообразное собрать? С меня контроллер
Думаю, можно из них что-нибудь собрать. Но на каждую ногу, думаю, еще один мотор понадобится или что-то еще. Потому что надо двигать ее вперед-назад и поднимать-опускать.
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
По мотору на ногу слишком монстроидально уже.
Я думал по мотору на сторону, и как-то поднимать лапы, например еще 2 мотора.
Получится как букашка из первых постов, но чуть больше интеллекта
Типа вот так:

Добавлено спустя 2 минуты 39 секунд:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
во, поднимать лапы можно миниатюрными электромагнитами из печатающих головок игольчатых принтеров
Я думал по мотору на сторону, и как-то поднимать лапы, например еще 2 мотора.
Получится как букашка из первых постов, но чуть больше интеллекта
Типа вот так:
Добавлено спустя 2 минуты 39 секунд:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
во, поднимать лапы можно миниатюрными электромагнитами из печатающих головок игольчатых принтеров
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Идеи Мегабизона реализуют в Штатах. Тараканы с одним двигателем. http://robotor.ru/2011/10/28/clash-robot/#more-4024

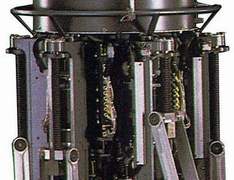
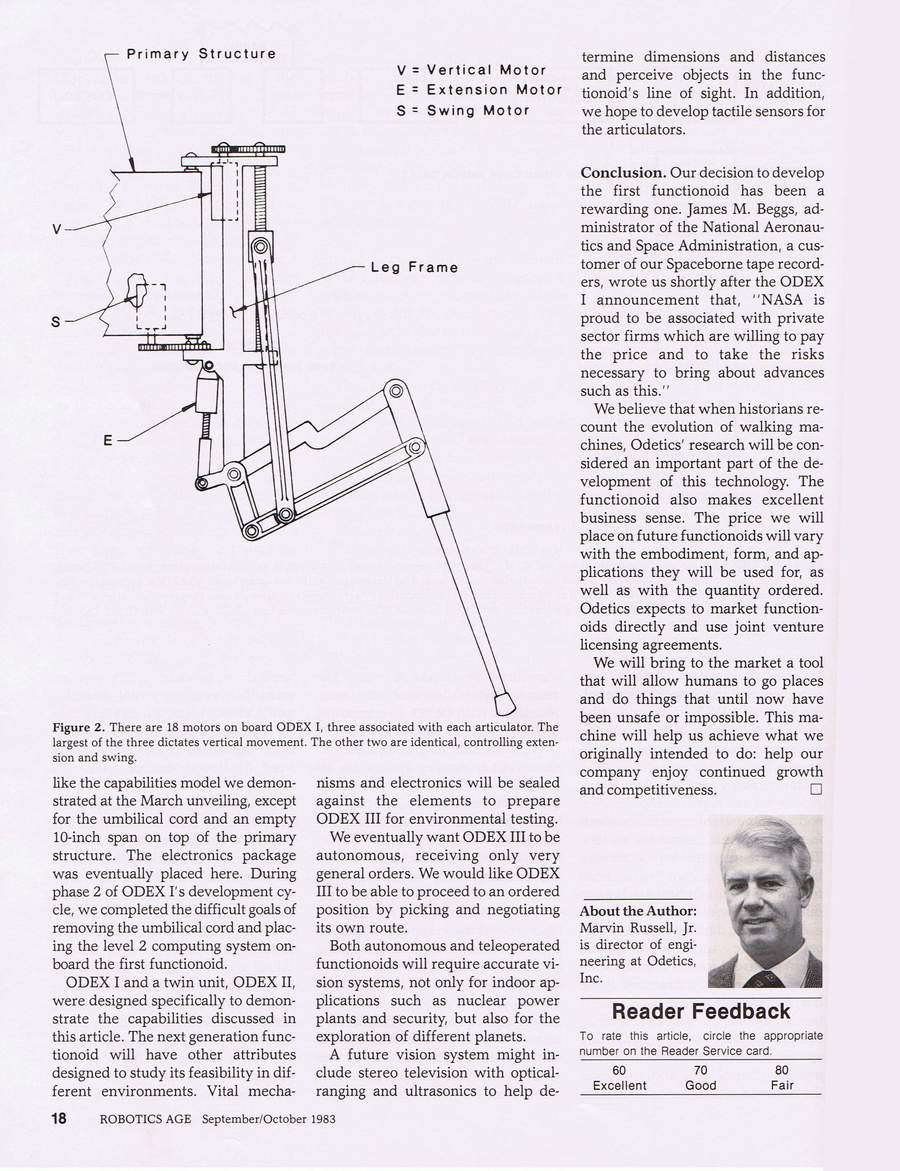
2Dmitry___: Был такой робот крутой - Odex I. У него приводы своеобразные на ноги, в принципе можно использовать шаговики для создания уменьшенного аналога, как мне кажется. http://www.theoldrobots.com/odex.html

Скорость передвижения, конечно, не высокая, но зато грузоподьемность хороша.
2Dmitry___: Был такой робот крутой - Odex I. У него приводы своеобразные на ноги, в принципе можно использовать шаговики для создания уменьшенного аналога, как мне кажется. http://www.theoldrobots.com/odex.html
Скорость передвижения, конечно, не высокая, но зато грузоподьемность хороша.
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
да, интересная хрень 
под такого не жалко по мотору на ногу, только там, по-моему, степеней свободы на лапу больше чем 1 шаговик
Добавлено спустя 18 минут 50 секунд:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
Посмотрел сайт по Odex I
3 мотора на ногу, 1 мотор можно убрать (вращение ноги).
Аж загорелся повторить. Технология доступна, листовой стеклотекстолит, inventor, чпу фрезер
Добавлено спустя 4 минуты 10 секунд:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
3-й мотор не убрать
под такого не жалко по мотору на ногу, только там, по-моему, степеней свободы на лапу больше чем 1 шаговик
Добавлено спустя 18 минут 50 секунд:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
Посмотрел сайт по Odex I
3 мотора на ногу, 1 мотор можно убрать (вращение ноги).
Аж загорелся повторить. Технология доступна, листовой стеклотекстолит, inventor, чпу фрезер
Добавлено спустя 4 минуты 10 секунд:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
3-й мотор не убрать
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Стрёмный хекс какой-то 
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Этот хекс у них довольно мощный получился, управлялся по радио, тяжести хорошо подымал, но продолжения с 1984 года не получил... 
2Dmitry__: Там можно один шаговик использовать на основном винте, и один на вспомогательном (которые V и E), а поворот (двигатель S) - сервой, нагрузки осевой нету ведь.
2Dmitry__: Там можно один шаговик использовать на основном винте, и один на вспомогательном (которые V и E), а поворот (двигатель S) - сервой, нагрузки осевой нету ведь.
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
какими-то ветхозаветными фантастическими фильмами повеяло ))
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
да, скорее даже НФ-ужасами
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Dmitry__ писал(а):По мотору на ногу слишком монстроидально уже.
Я думал по мотору на сторону, и как-то поднимать лапы, например еще 2 мотора.
Получится как букашка из первых постов, но чуть больше интеллекта
Eruman писал(а):2Dmitry__: Там можно один шаговик использовать на основном винте, и один на вспомогательном (которые V и E), а поворот (двигатель S) - сервой, нагрузки осевой нету ведь.
На этой схеме один двигатель лишний - Е, вспомогательный: вместо E и V можно использовать один. В качестве поворотного механизма S здесь стоит использовать один из данных шаговых двигателей, а вместо того, который поднимает (E и V) - как раз вот это:
Dmitry__ писал(а):Добавлено спустя 2 минуты 39 секунд:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
во, поднимать лапы можно миниатюрными электромагнитами из печатающих головок игольчатых принтеров
Двигатель поворачивает лапу, а эта штука - поднимает.
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Судя по схеме, как я понял, один двигатель основной (V), несущий, а другой - вспомогательный (E), смещает стопу дальше/ближе. Без него траектория ноги зафиксируется.
Добавлено спустя 54 секунды:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
И электромагниты не помогут...
Добавлено спустя 54 секунды:
Re: Павуки (и не только) из разогнутых скрепок и прочего хлама..
И электромагниты не помогут...
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Сделал двуногого с одним мотором:
- Вложения
-
-
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Точь-в-точь мой жук в начале эволюции, я недавно нечто такое из фанеры делал, у мен его очень сильно шатало Классная вещь!!!
Похоже на птицу Только механизм какой-то другой как я понял? Можно пожалуйста подробней?
Классная вещь!!!Похоже на птицу
Только механизм какой-то другой как я понял? Можно пожалуйста подробней?