Суть верна.. так, несколько моментов учесть - и работать будет. Вот только моторчик прям в хваталке размещать я б не советовал - лишний груз на весу.
Я лапки-хваталки делать даже не брался - кто ими управлять должен?. и как.. Ноги оно понятно - вал крутится, ноги топают.. в том и есть их простой смысл. А вот лапа проволочнику зачем - хз.
Ничё сложного в самой конструкции я не вижу, и, если потребуется манипулярт, то запросто его хоть какой сварганю. Просто особо незачем пока что было ))
roboforum.ru
Технический форум по робототехнике.
Павуки (и не только) из разогнутых скрепок и прочего хлама..
Правила форума
В этом форуме новые темы не создаются, однако обсуждение допустимо.
В этом форуме новые темы не создаются, однако обсуждение допустимо.
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Radist писал(а):Что-то мне говорит, что гайка не будет ездить взад/перед, а будет тупо крутиться, сжимая тягами "палцы". Такой вот "манепулятор"-хваталка. Надо бы ей уменьшить число степеней свободы.
Оно будет всё твёрдо и ничего такого не будет.
Сделать руку гибкую, а на неё захват.MegaBIZON писал(а):Суть верна.. так, несколько моментов учесть - и работать будет. Вот только моторчик прям в хваталке размещать я б не советовал - лишний груз на весу.
Я лапки-хваталки делать даже не брался - кто ими управлять должен?. и как.. Ноги оно понятно - вал крутится, ноги топают.. в том и есть их простой смысл. А вот лапа проволочнику зачем - хз.
Ничё сложного в самой конструкции я не вижу, и, если потребуется манипулярт, то запросто его хоть какой сварганю. Просто особо незачем пока что было ))
 Есть темы про манепуляторы!!??
Есть темы про манепуляторы!!??Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Я не про то.
Я о том, что раз робот не в состоянии как-то осознанно пользоваться хватательной функцией (мне такого спаять не по силам), то и незачем ему эти все хваталки. А самому управлять лапой - так это ещё надо придумать КАК: по проводам (никакой мобильности), по радио (не умею), или ещё как-то там...
А просто сварганить из чего попало настольный стационарный ухват с парой локтей и проводным управлением - это запросто )) так, чиста поиграться. Можно бы, конечно Но просто лень... однако эта мысля у меня давно тау в голове угнездилась.. замутю наверное когда-нибудь от скуки....
Я о том, что раз робот не в состоянии как-то осознанно пользоваться хватательной функцией (мне такого спаять не по силам), то и незачем ему эти все хваталки. А самому управлять лапой - так это ещё надо придумать КАК: по проводам (никакой мобильности), по радио (не умею), или ещё как-то там...
А просто сварганить из чего попало настольный стационарный ухват с парой локтей и проводным управлением - это запросто )) так, чиста поиграться. Можно бы, конечно
Но просто лень... однако эта мысля у меня давно тау в голове угнездилась.. замутю наверное когда-нибудь от скуки....Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Мне ВаДиМ BOT подкинул идею использования этой лапы, можно паяльную станцию сделать, лапу приладить или две, на кнопку нажал оно взяло детали и можно паять, на другую отпустило или с датчиками нахитрить схему, но такое пригодится только совсем сложных случаях, а такое у меня часто происходит.
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Ну тут всё зависит от точности и прочности исполнения - а тут с проволочками далеко не уедешь ))
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Мужики, был на практике, и мне в руки попалась очень классная штука! Наконечники для электро проводки, они идеальные для переходников, втулок, для увеличении диаметра скрепки под зубчатое колесо!
стоят как выяснилось копейки, прощайте спиральки=)
http://progressiv-spb.com/nakonechnik_s ... lochnyy_iz
стоят как выяснилось копейки, прощайте спиральки=)
http://progressiv-spb.com/nakonechnik_s ... lochnyy_iz
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Вот дошли руки до 2-ногого робота =)
цените, и советуйте

Вид сверху

Вид сбоку

Вид спереди
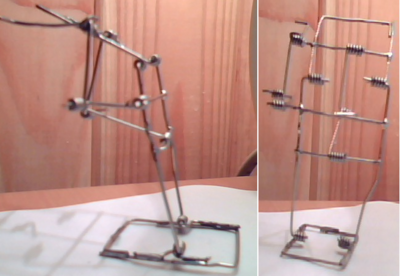
Конструкция ноги
цените, и советуйте
Вид сверху
Вид сбоку
Вид спереди
Конструкция ноги
- Вложения
-
-
Последний раз редактировалось kolDOOM 23 окт 2011, 18:53, всего редактировалось 1 раз.
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
интересная модификация, надо сделать ещё такого же и соединить их
тогда будет 4х ногий робот и точно пойдёт =)
тогда будет 4х ногий робот и точно пойдёт =)
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Я думаю четырёхногий будет лучше ходить по такому прнципу, передние ноги в вертикальной плоскости будут врашаться, а задние в горизонтальной.
Он просто ногами вперёд и назад двигает?kolDOOM писал(а):Вот дошли руки до 2-ногого робота =)
цените, и советуйте
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Когда левая нога скользит вперед то правая скользит назад, получается такая себе шаркающая походка 
А так в дальнейшем буду пытаться имитировать хотьбу человека, к конструкции данного робота нужно будет приделать тяги для поднятия "коле"
ну это только планы.
А так в дальнейшем буду пытаться имитировать хотьбу человека, к конструкции данного робота нужно будет приделать тяги для поднятия "коле"
ну это только планы.
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
kolDOOM писал(а):Когда левая нога скользит вперед то правая скользит назад, получается такая себе шаркающая походка
А так в дальнейшем буду пытаться имитировать хотьбу человека, к конструкции данного робота нужно будет приделать тяги для поднятия "коле"
ну это только планы.
Молодец так держать! Скоро до андроида из скрепок дойдёшь
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
спасибо =) я ты над чем щас работаешь?
Мужики кто может выложить подробную схему, или более подробных фото этого робота
Мужики кто может выложить подробную схему, или более подробных фото этого робота
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Пока не над чем.
Вот, из сказанного кем-то ранее. Сам сначала понять не мог, потом видео увидел и понял что к чему
Вот, из сказанного кем-то ранее. Сам сначала понять не мог, потом видео увидел и понял что к чему
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
HELP! 
мужики-конструкторы, щас занимаюсь каракуртом, 4 ноги сделал, угловые, средние ноги только на поднятие, подскажите пожалуйста,откуда брать тяги для движенья вперёд-назад, как у Акакия ?!

мужики-конструкторы, щас занимаюсь каракуртом, 4 ноги сделал, угловые, средние ноги только на поднятие, подскажите пожалуйста,откуда брать тяги для движенья вперёд-назад, как у Акакия ?!
Re: Павуки (и не только) из разогнутых скрепок и прочего хла
Из cd-rom шаговики линейные. Нет идей как паукообразное собрать? С меня контроллер