| |
roboforum.ruТехнический форум по робототехнике. |
|
dccharacter - Излить посильно
Правила форума
В данном разделе каждый может иметь не более одной темы. Тема должна начинаться с логина (ника) робофорума.
В данном разделе каждый может иметь не более одной темы. Тема должна начинаться с логина (ника) робофорума.
Re: dccharacter - Излить посильно
![]() Redallex » 24 апр 2015, 17:27
Redallex » 24 апр 2015, 17:27
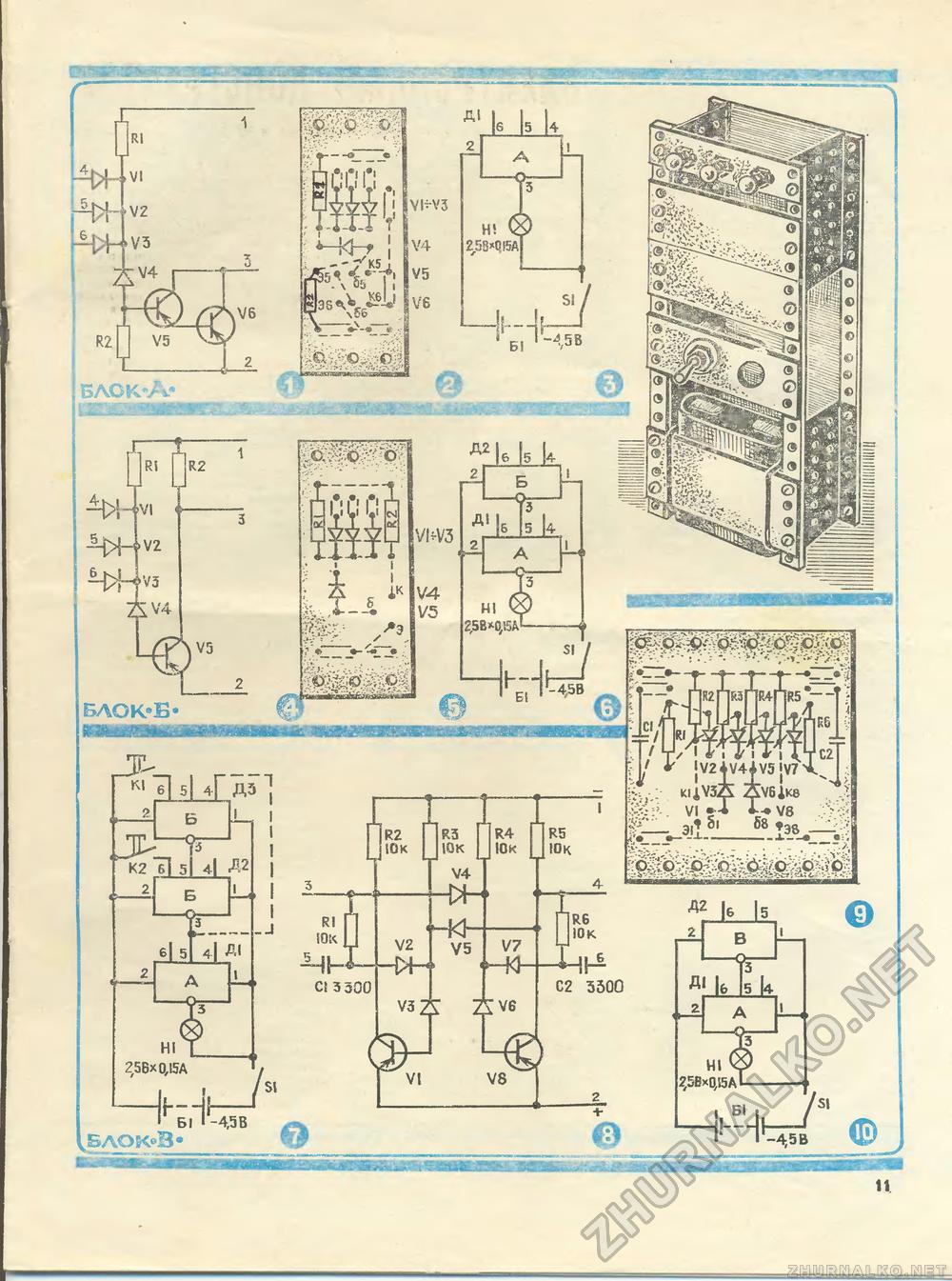
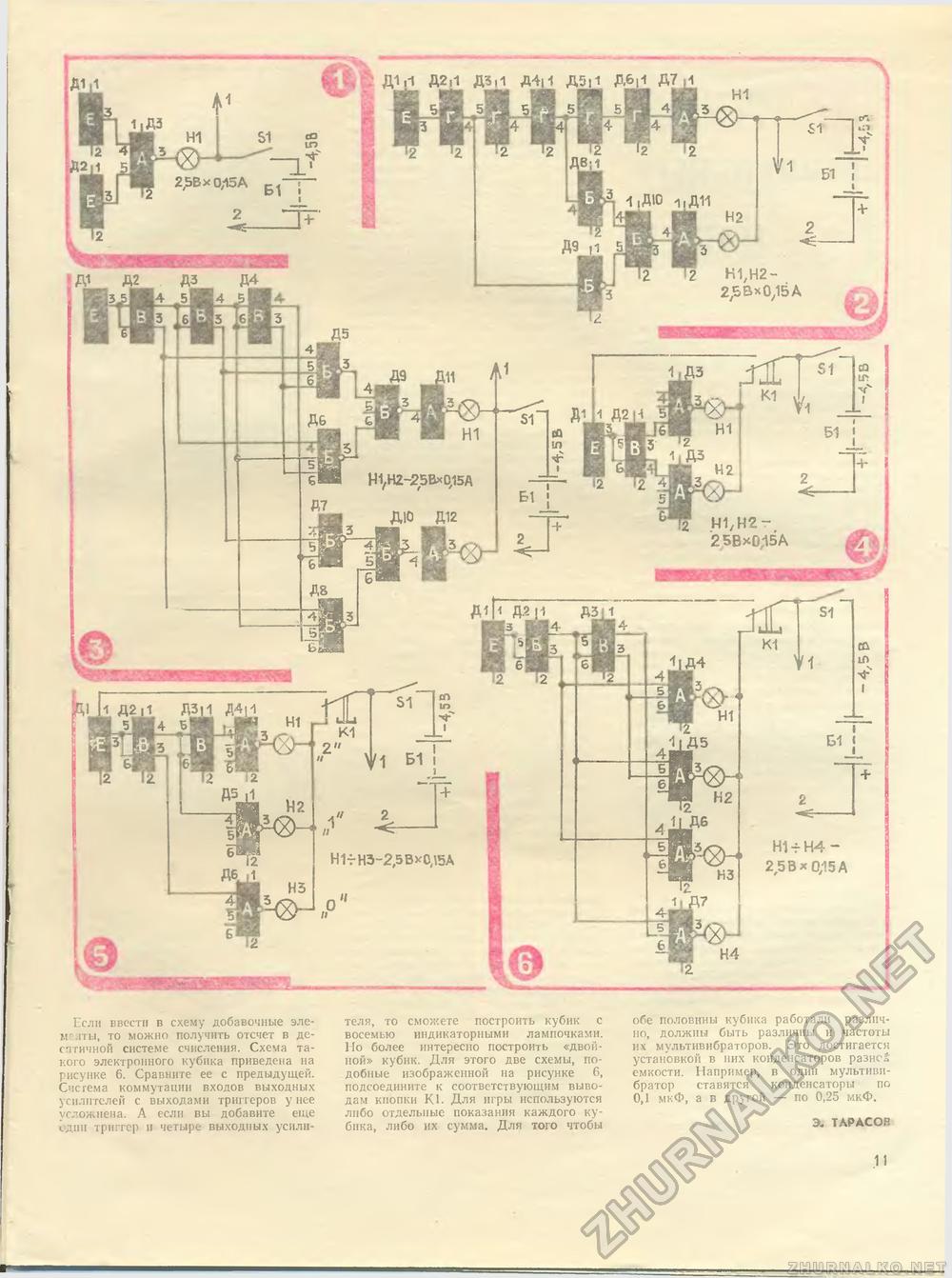
Мама сохранила мои хотелки в 1982году...
- Вложения
-
-

Redallex - Сообщения: 247
- Зарегистрирован: 13 янв 2008, 22:05
- Откуда: Пермь
- ФИО: Александр
Re: dccharacter - Излить посильно
![]() Dmitry__ » 24 апр 2015, 18:00
Dmitry__ » 24 апр 2015, 18:00
Redallex писал(а):Мама сохранила мои хотелки в 1982году...
Слово "радио" много раз повторялось

А я нашел ЮТ который замусоливал. Оказывается я уже был тогда большой, целых 13 лет
http://xn-----6kcwbqeldsdd4a9ag6b6f6b.xn--p1ai/index.php?cat=85
Добавлено спустя 2 минуты 35 секунд:
Тогда я понял, что за этим будущее:)
-

Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: dccharacter - Излить посильно
![]() dccharacter » 25 апр 2015, 12:42
dccharacter » 25 апр 2015, 12:42
Вот. А я такие статьи пропускал. Ну потому что - че толку-то? Не было вообще ничего. Шакалил выброшенные платы с погоревшими деталями на свалке у НИИ. Собрал блок питания из найденных деталей - не заработал. Потом оказалось (отец привел с работы радиотехника) что у силового транзистора коллектор с эммитером перепутал. БП заработал. СКОЛЬКО ВСЕГО ПОГОРЕЛО потом! Калькулятор особенно жалко МК51...
Добавлено спустя 28 минут 54 секунды:
Блин, начал листать журнальчики - остро вспомнил вот это вот все. Сидишь и в журнальчиках и книжках днями выискиваешь - с тем, что у тебя есть - как сделать ХОТЬ ЧТО-ТО? ПРичем не было вообще ничего - ватмана например. Вообще никогда его не видел. Поговаривали, что это что-то типа альбомной бумаги, но плотнее. Миллиметровка - куда там... Магазин радиодеталей ближайший - в обнинске. Ну и там лежат горсть резисторов, пара транзисторов и светодиоды. Ездил ПРОСТО ПОСМОТРЕТЬ. Ну и купить пара светодиодов - как, зачем, вообще не понятно. ЧТОБЫ БЫЛО. Была коробка с наковыренными из выкинутых плат деталями. Резисторы МЛТ с открученными ножками. Побывавшие в костре электролиты. Сидишь и чахнешь над своим богатством. И почти никогда ничего толком не выходим. Даже не пытался никогда вникнуть как оно вообще работает и почему. Собрал детекторный приемник, принимал на провод, обмотанный вокруг батареи. Что-то ведь принимал. Феррит - где я взял феррит для него? Это же была магия - я в школе нашел ферритовый стержень - целый. Наш хулиган Коля увидел, и говорит - дай посмотреть. Ну я дал. А он говорит - я его себе оставлю. А я всю жизнь мечтал об этом стержне - и вот нашел и он из рук уходит. Коль, говорю - отдай, ну что тебе с него? А мне нужен. Коля говорит - а зачем? А Я НЕ ЗНАЮ ЗАЧЕМ. ПРОСТО ОН МНЕ ВСЕГДА БЫЛ НУЖЕН. Коль, говорю, нужен. Отдай. Не поколи только его, Коль. Хрупкий он. Наверное по мне было видно, что за этот стержень можно и с гранатой под танк, отдал. Ну естественно, этот стержень потом у меня был... И так вот все кругом. Найдешь че-нить и думаешь - а что бы из этого сделать. Колесо найдешь кривое от тележки - мечтаешь о картинге. Досочку найдешь - надо самолет собрать. Отверстия сверлил ножницами. Все ножницы мамкины перевел. В эбоните, почему-то, очень плохо сверлились. С металлами лучше не связываться. Хотя тиски были, но в отверстиях не по размеру отцовские метчики обламывались. Я вот вырос, а все метчики отцовские меньше пятерки так и валяются обломанные по банкам... Тоска, братцы.
Добавлено спустя 1 минуту 47 секунд:
Вспомнил - очень хотелось на воздушной подушке корабль сделать. Нужны были Ватман и Болонья. Понимаете, да? В магазинах пуговицы есть. А Ватман и Болонья.... Как-то не было.
Добавлено спустя 28 минут 54 секунды:
Блин, начал листать журнальчики - остро вспомнил вот это вот все. Сидишь и в журнальчиках и книжках днями выискиваешь - с тем, что у тебя есть - как сделать ХОТЬ ЧТО-ТО? ПРичем не было вообще ничего - ватмана например. Вообще никогда его не видел. Поговаривали, что это что-то типа альбомной бумаги, но плотнее. Миллиметровка - куда там... Магазин радиодеталей ближайший - в обнинске. Ну и там лежат горсть резисторов, пара транзисторов и светодиоды. Ездил ПРОСТО ПОСМОТРЕТЬ. Ну и купить пара светодиодов - как, зачем, вообще не понятно. ЧТОБЫ БЫЛО. Была коробка с наковыренными из выкинутых плат деталями. Резисторы МЛТ с открученными ножками. Побывавшие в костре электролиты. Сидишь и чахнешь над своим богатством. И почти никогда ничего толком не выходим. Даже не пытался никогда вникнуть как оно вообще работает и почему. Собрал детекторный приемник, принимал на провод, обмотанный вокруг батареи. Что-то ведь принимал. Феррит - где я взял феррит для него? Это же была магия - я в школе нашел ферритовый стержень - целый. Наш хулиган Коля увидел, и говорит - дай посмотреть. Ну я дал. А он говорит - я его себе оставлю. А я всю жизнь мечтал об этом стержне - и вот нашел и он из рук уходит. Коль, говорю - отдай, ну что тебе с него? А мне нужен. Коля говорит - а зачем? А Я НЕ ЗНАЮ ЗАЧЕМ. ПРОСТО ОН МНЕ ВСЕГДА БЫЛ НУЖЕН. Коль, говорю, нужен. Отдай. Не поколи только его, Коль. Хрупкий он. Наверное по мне было видно, что за этот стержень можно и с гранатой под танк, отдал. Ну естественно, этот стержень потом у меня был... И так вот все кругом. Найдешь че-нить и думаешь - а что бы из этого сделать. Колесо найдешь кривое от тележки - мечтаешь о картинге. Досочку найдешь - надо самолет собрать. Отверстия сверлил ножницами. Все ножницы мамкины перевел. В эбоните, почему-то, очень плохо сверлились. С металлами лучше не связываться. Хотя тиски были, но в отверстиях не по размеру отцовские метчики обламывались. Я вот вырос, а все метчики отцовские меньше пятерки так и валяются обломанные по банкам... Тоска, братцы.
Добавлено спустя 1 минуту 47 секунд:
Вспомнил - очень хотелось на воздушной подушке корабль сделать. Нужны были Ватман и Болонья. Понимаете, да? В магазинах пуговицы есть. А Ватман и Болонья.... Как-то не было.
-

dccharacter - Сообщения: 4995
- Зарегистрирован: 10 дек 2010, 13:16
- Откуда: Красногорск МО
- прог. языки: C, Python, wiring/processing
- ФИО: Андрей
Re: dccharacter - Излить посильно
![]() Dmitry__ » 25 апр 2015, 16:26
Dmitry__ » 25 апр 2015, 16:26
Зачетно наговорил, прям детскими мыслями 
Дааа, взрослые все вредные, подумаешь метчиков горстку наломал. Чтоб что-нибудь собрать - надо сначала все сломать. А мы выковыривали детали из прессованных телевизоров со свалки завода Козицкого. Это такая гора телевизоров с 3-х этажный дом. В магазинах цены запредельные, а на свалки никого не пускали, вот поэтому СССР и развалился. А еще ракеты делали из зубных паст и целлулоидных мыльниц. Как летали, как летали. А когда я себе руку прострелил самодельным пистолетом, тогда детство и закончилось
Дааа, взрослые все вредные, подумаешь метчиков горстку наломал. Чтоб что-нибудь собрать - надо сначала все сломать. А мы выковыривали детали из прессованных телевизоров со свалки завода Козицкого. Это такая гора телевизоров с 3-х этажный дом. В магазинах цены запредельные, а на свалки никого не пускали, вот поэтому СССР и развалился. А еще ракеты делали из зубных паст и целлулоидных мыльниц. Как летали, как летали. А когда я себе руку прострелил самодельным пистолетом, тогда детство и закончилось
-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: dccharacter - Излить посильно
![]() slom » 27 апр 2015, 11:51
slom » 27 апр 2015, 11:51
дядьки вспомнили детство....
я вот недавно откопал свои детские запасы резисторов, чтоб к ардуине присобачить парочку, нужного номинала не было, сколхозил из 2х последовательно
а с пол года назад нашел свой старый "жучок" делал еще в классе 10, и тогда все работало. схема до безобразия проста, всего 1 транзистор и 4-5 элементов.
блин попытался повторить сейчас, нифига не получилось
толи руки стали кривыми толи запчасти сейчас такие производить стали
я вот недавно откопал свои детские запасы резисторов, чтоб к ардуине присобачить парочку, нужного номинала не было, сколхозил из 2х последовательно
а с пол года назад нашел свой старый "жучок" делал еще в классе 10, и тогда все работало. схема до безобразия проста, всего 1 транзистор и 4-5 элементов.
блин попытался повторить сейчас, нифига не получилось
толи руки стали кривыми толи запчасти сейчас такие производить стали
-

slom - Сообщения: 645
- Зарегистрирован: 07 сен 2014, 19:29
- Откуда: Севастополь
- Skype: slom_3d
- прог. языки: 3d max :)
Re: dccharacter - Излить посильно
![]() dccharacter » 03 май 2015, 05:07
dccharacter » 03 май 2015, 05:07
Препод из Беркли дает совет студенту как от курса по ИИ перейти к решению реальных задач робототехники:
In terms of getting some hands-on experience, working through ROS tutorials on the topics relevant to your particular problem are a great starting point. As robots tend to operate in continuous state space (rather than discrete), unless you find software packages that do out of the box what you need, you'll need along the way to familiarize yourself with how planning works out in continuous state spaces. Beyond planning, to deal with sensing, a good starting point is to self-study the second half of this course through the archived materials, to which you can request access here: <link>. Again, you'll then have to go beyond the discrete state space setting (which is the one we cover since it tends to be the easiest one to build the main intuitions), and upgrade your understanding to the continuous setting.
My graduate course CS287 Advanced Robotics covers most of the topics necessary to go from the 188 concepts to real robotic applications. The website is here: http://www.cs.berkeley.edu/~pabbeel/cs287-fa13/. The graduate course is also a good starting point to explore the state of the art in general. Be forewarned though that the graduate course expects a certain mathematical background, as listed on the webpage (which includes pointers as to how to self-study for some of that background).
I wouldn't say continuous state spaces is a pre-req, but being somewhat familiar with linear algebra, continuous optimization, and continuous probability (e.g., multi-variate Gaussians) will be critical (or would otherwise reading background materials as you go along).
For a deeper dive in the relevant background topics, in terms of most readily available materials, I'd recommend to self-study:
Stanford's EE263 by Boyd, Stanford's CS229 by Ng, Stanford's EE364a by Boyd. Lectures are available on YouTube, homework assignments / slides / lecture notes are available on the course homepage. If you know the complete CS188 and all of these materials, you'll be very ready for CS287. Once you also know CS287 you'll pretty much be able to take on any problem in robotics. Note that CS229 has a highly simplified version available as a MOOC on coursera, might be worthwhile as a warm-up before studying the actual on campus course materials.
In terms of getting some hands-on experience, working through ROS tutorials on the topics relevant to your particular problem are a great starting point. As robots tend to operate in continuous state space (rather than discrete), unless you find software packages that do out of the box what you need, you'll need along the way to familiarize yourself with how planning works out in continuous state spaces. Beyond planning, to deal with sensing, a good starting point is to self-study the second half of this course through the archived materials, to which you can request access here: <link>. Again, you'll then have to go beyond the discrete state space setting (which is the one we cover since it tends to be the easiest one to build the main intuitions), and upgrade your understanding to the continuous setting.
My graduate course CS287 Advanced Robotics covers most of the topics necessary to go from the 188 concepts to real robotic applications. The website is here: http://www.cs.berkeley.edu/~pabbeel/cs287-fa13/. The graduate course is also a good starting point to explore the state of the art in general. Be forewarned though that the graduate course expects a certain mathematical background, as listed on the webpage (which includes pointers as to how to self-study for some of that background).
I wouldn't say continuous state spaces is a pre-req, but being somewhat familiar with linear algebra, continuous optimization, and continuous probability (e.g., multi-variate Gaussians) will be critical (or would otherwise reading background materials as you go along).
For a deeper dive in the relevant background topics, in terms of most readily available materials, I'd recommend to self-study:
Stanford's EE263 by Boyd, Stanford's CS229 by Ng, Stanford's EE364a by Boyd. Lectures are available on YouTube, homework assignments / slides / lecture notes are available on the course homepage. If you know the complete CS188 and all of these materials, you'll be very ready for CS287. Once you also know CS287 you'll pretty much be able to take on any problem in robotics. Note that CS229 has a highly simplified version available as a MOOC on coursera, might be worthwhile as a warm-up before studying the actual on campus course materials.
-
dccharacter - Сообщения: 4995
- Зарегистрирован: 10 дек 2010, 13:16
- Откуда: Красногорск МО
- прог. языки: C, Python, wiring/processing
- ФИО: Андрей
Re: dccharacter - Излить посильно
![]() dccharacter » 23 май 2015, 09:33
dccharacter » 23 май 2015, 09:33
Народ, че я делаю не так?
Надо ногой esp8266 дергать уартом в 5-вольтовом устройстве. В есп8266 - ТХ, в том устройстве - Rx.
Кидаю напрямую соплю. Синий светодиод на ЕСП горит постоянно, нога не дергается. Отключаю - дергается.
Думаю - ну мож че-то там не тянет, ток не дотекает и т.д. Ставлю транзистор кт3102г. От ЕСП на базу сопротивление 430 Ом. Эмиттер на землю. Коллектор через 4.7кОм на внешние 5В. Картина та же самая - светодиод горит постоянно, на базе и на ноге ЕСП в районе 0.6В. Мож я как-то причудливо ногу спалил ЕСП-шке? Но без нагрузки-то она дергается прекрасно, хошь туда, хошь сюда... Полевик что-ли еще попробовать? Задолбался паять уже плату из 5 деталей две недели. В теории все прекрасно, в железе по отдельности тоже, вместе - ни в какую.
Причем если после запитки платы подключить ЕСП, то все вертится. Но если кинуть питание на плату с подключенной ЕСП - вот такая фигня.
Надо ногой esp8266 дергать уартом в 5-вольтовом устройстве. В есп8266 - ТХ, в том устройстве - Rx.
Кидаю напрямую соплю. Синий светодиод на ЕСП горит постоянно, нога не дергается. Отключаю - дергается.
Думаю - ну мож че-то там не тянет, ток не дотекает и т.д. Ставлю транзистор кт3102г. От ЕСП на базу сопротивление 430 Ом. Эмиттер на землю. Коллектор через 4.7кОм на внешние 5В. Картина та же самая - светодиод горит постоянно, на базе и на ноге ЕСП в районе 0.6В. Мож я как-то причудливо ногу спалил ЕСП-шке? Но без нагрузки-то она дергается прекрасно, хошь туда, хошь сюда... Полевик что-ли еще попробовать? Задолбался паять уже плату из 5 деталей две недели. В теории все прекрасно, в железе по отдельности тоже, вместе - ни в какую.
Причем если после запитки платы подключить ЕСП, то все вертится. Но если кинуть питание на плату с подключенной ЕСП - вот такая фигня.
Последний раз редактировалось dccharacter 23 май 2015, 22:15, всего редактировалось 1 раз.
-
dccharacter - Сообщения: 4995
- Зарегистрирован: 10 дек 2010, 13:16
- Откуда: Красногорск МО
- прог. языки: C, Python, wiring/processing
- ФИО: Андрей
Re: dccharacter - Излить посильно
![]() dccharacter » 23 май 2015, 20:41
dccharacter » 23 май 2015, 20:41
хм
Fatal exception (3):
epc1=0x40100000, epc2=0x00000000, epc3=0x00000000, excvaddr=0x40001290, depc=0x00000000
Добавлено спустя 9 минут 40 секунд:
Какая-то лажа. Перевесил УАРТ на другую ногу. Один фиг, когда подключаешь нагрузку к ноге, модуль падает в ресет. Через 430 Ом на 3.6В же максимальный ток - 8мА, а там еще 0.6В падение на базе транзистора, т.е.вообще 6мА. Вдвое меньше лимита в 12мА. Какого фига? Повесить туда пару килоом что ли?
Fatal exception (3):
epc1=0x40100000, epc2=0x00000000, epc3=0x00000000, excvaddr=0x40001290, depc=0x00000000
Добавлено спустя 9 минут 40 секунд:
Какая-то лажа. Перевесил УАРТ на другую ногу. Один фиг, когда подключаешь нагрузку к ноге, модуль падает в ресет. Через 430 Ом на 3.6В же максимальный ток - 8мА, а там еще 0.6В падение на базе транзистора, т.е.вообще 6мА. Вдвое меньше лимита в 12мА. Какого фига? Повесить туда пару килоом что ли?
-
dccharacter - Сообщения: 4995
- Зарегистрирован: 10 дек 2010, 13:16
- Откуда: Красногорск МО
- прог. языки: C, Python, wiring/processing
- ФИО: Андрей
Re: dccharacter - Излить посильно
![]() Dmitry__ » 23 май 2015, 20:46
Dmitry__ » 23 май 2015, 20:46
Зачем ты вообще такой низкоомный резистор в базу засунул? Ставь от 3к до 100к.
-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: dccharacter - Излить посильно
![]() dccharacter » 23 май 2015, 20:59
dccharacter » 23 май 2015, 20:59
хм, 4.7кОм повесил. Один фиг уходит в ребут. А чо это может быть в принципе? При токе около 0.7мА - как он может вообще что-то чувствовать?
Добавлено спустя 2 минуты 28 секунд:
Причем явно что-то на старте происходит, потому что если отключить Тх, подать питание и подключить его - все ОК. Питание пробовал и AMS1117-33, сейчас питается от трехамперного степ-дауна. Питание 3.5В, стабильно. ЧО ЗА ЛАЖА? Уже все отпаял и напрямую проводами скрутил, чтоб исключить флюсы и прочеее. ПППЦЦЦЦЦЦЦ
Добавлено спустя 59 секунд:
О,ща осциллом посмотрим напругу на резисторе.
Добавлено спустя 2 минуты 28 секунд:
Причем явно что-то на старте происходит, потому что если отключить Тх, подать питание и подключить его - все ОК. Питание пробовал и AMS1117-33, сейчас питается от трехамперного степ-дауна. Питание 3.5В, стабильно. ЧО ЗА ЛАЖА? Уже все отпаял и напрямую проводами скрутил, чтоб исключить флюсы и прочеее. ПППЦЦЦЦЦЦЦ
Добавлено спустя 59 секунд:
О,ща осциллом посмотрим напругу на резисторе.
-
dccharacter - Сообщения: 4995
- Зарегистрирован: 10 дек 2010, 13:16
- Откуда: Красногорск МО
- прог. языки: C, Python, wiring/processing
- ФИО: Андрей
Re: dccharacter - Излить посильно
![]() Dmitry__ » 23 май 2015, 21:07
Dmitry__ » 23 май 2015, 21:07
Гугля говорит, что синий светодиод всегда горит когда слетает прошивка. Я с этим модулем дел не имел, могу только теоретизировать, но пин работает явно не как выход, или он настраивается на выход с открытым коллектором и ловит помехи как старт биты.
-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: dccharacter - Излить посильно
![]() dccharacter » 23 май 2015, 21:28
dccharacter » 23 май 2015, 21:28
Хм, короче модуль при старте начинает сыпать отладку в уарт. При этом с нарастающей амплитудой на спадающем фронте появляются всплески обратного напряжения. Как только амплитуда достигает примерно 0,6В, всплески пропадают, и процесс начинается заново - судя по всему это и есть ребут. Ща попробую картинку запилить. Это на резисторе Тх - база транзистора
Добавлено спустя 1 минуту 23 секунды:
Синий горит, потому что это индикатор передачи. Соответственно, когда модуль в бесконечном ребуте, он сыпет в консоль без остановки "ПОМОГИТЕ СПАСИТЕ ПАДА... ПОМОГИТЕ СПАСИТЕ ПАДА...". А вот отчего он падает...
Добавлено спустя 2 минуты 50 секунд:
Вот как это выглядит
Добавлено спустя 6 минут 43 секунды:
Мож с землей транзистора че-то не то?
Добавлено спустя 7 минут 58 секунд:
Перекинул землю транзистора на землю модуля. Пофиг... Отчего такая хрень может быть? Это ж биполярный транзистор, там же нет расчудесной затворной емкости?
Добавлено спустя 1 минуту 23 секунды:
Синий горит, потому что это индикатор передачи. Соответственно, когда модуль в бесконечном ребуте, он сыпет в консоль без остановки "ПОМОГИТЕ СПАСИТЕ ПАДА... ПОМОГИТЕ СПАСИТЕ ПАДА...". А вот отчего он падает...
Добавлено спустя 2 минуты 50 секунд:
Вот как это выглядит
Добавлено спустя 6 минут 43 секунды:
Мож с землей транзистора че-то не то?
Добавлено спустя 7 минут 58 секунд:
Перекинул землю транзистора на землю модуля. Пофиг... Отчего такая хрень может быть? Это ж биполярный транзистор, там же нет расчудесной затворной емкости?
- Вложения
-
- IMAGE000.jpg (50.66 КиБ) Просмотров: 3090
-
dccharacter - Сообщения: 4995
- Зарегистрирован: 10 дек 2010, 13:16
- Откуда: Красногорск МО
- прог. языки: C, Python, wiring/processing
- ФИО: Андрей
Re: dccharacter - Излить посильно
![]() Dmitry__ » 23 май 2015, 21:29
Dmitry__ » 23 май 2015, 21:29
Этих выбросов может не быть на самом деле. Очень смахивает на огранич. диод в цепи щупа на стороне осцилла. Так может вести щуп осцилла без должной настройки. Проверь щуп на прямоугольных импульсах. А еще лучше, при измерениях на esp8266, послед. щупу поставить резистор примерно 10к, чтоб завалить вч фронты и не давать проходить отраженным импульсам на пины esp8266. Или использовать щуп с делителем напряжения, делитель должен быть обязательно в самом щупе (не в основании разьема щупа).
http://habrahabr.ru/post/145612/
http://habrahabr.ru/post/145612/
-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: dccharacter - Излить посильно
![]() dccharacter » 23 май 2015, 21:34
dccharacter » 23 май 2015, 21:34
А, стоп, это ж на резисторе напряжение, а не земля-нога. Но как-то уж подозрительны эти -0,6В... Ща посмотрю есть ли они на самой ноге
-
dccharacter - Сообщения: 4995
- Зарегистрирован: 10 дек 2010, 13:16
- Откуда: Красногорск МО
- прог. языки: C, Python, wiring/processing
- ФИО: Андрей
Re: dccharacter - Излить посильно
![]() Dmitry__ » 23 май 2015, 21:37
Dmitry__ » 23 май 2015, 21:37
Ты лучше не мерь, а прочитай что пишет esp8266. Мож там есть вся информация
-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0