Технический форум по робототехнике.
EdGull » 15 дек 2010, 01:01
Необходимо разработать систему управления роботом и передачу видео через Skype.
Здесь будет ТЗ
скайп или браузер
браузер предпочтительней
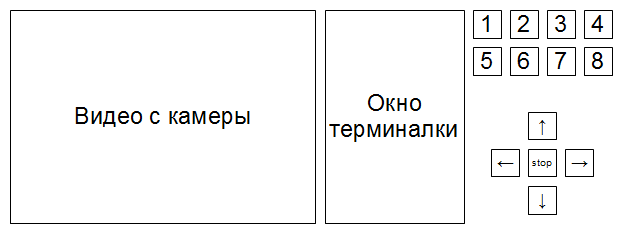
выглядеть должно вот так
кнопки должны иметь возможность переименновываться и менять отсылаемую строку
EdGull » 27 дек 2010, 10:25
плавность старта-стопа робот должен сам отрабатывать, так же как и предотвращение столкновений.
Grem » 27 дек 2010, 12:06
blindman писал(а):Grem писал(а):DTMF - скайп поддерживает, можно как отправлять, так и принимать их.
Отправлять - понятно. А как принимать?
На индуском форуме человек писал, что DTMF принимает CallListener.
- Код: Выделить всё • Развернуть
public static void addCallListener(CallListener listener) throws SkypeException
Эд, а нужна возможность подключаться к ком порту сервера с клиента?
EdGull » 27 дек 2010, 17:14
что значит подключаться?
как можно без подключения к компорту персылать в него данные?
Grem » 27 дек 2010, 17:42
1) Подключаться к ком порту непосредственно на серверной машине
2) Подключаться, например, отправив какую-нибудь команду через терминал клиента в _уже запущенную_ серверную часть.
EdGull » 27 дек 2010, 17:54
1. если не подключаться, условия ТЗ будут выполняться?
2. а как можно по другому?
Grem » 27 дек 2010, 17:58
условия ТЗ будут выполняться?
А там ни слова нет про ком порт

2. а как можно по другому?
Я написал, можно при запуске серверной части, сразу. Во всяком случае сейчас так и есть.
Сделаю оба в общем.
EdGull » 27 дек 2010, 18:06
а терминалка куда по твоему должна данные гнать?

Grem » 27 дек 2010, 18:12
Я про способ подключения. Ясень пень что соединение должно быть. А так, могу штук 10 различных способов подключения придумать за минуты 2. Поэтому хотел от вас услышать как именно надо.
Scorpio » 27 дек 2010, 20:49
avr123.nm.ru писал(а):Наверно многократно лучше - при дисконекте бот просто остановится, а не будет крушить все на своем пути
Напоминаю, что сообщение уже отправленное по скайповскому чату уже не удалишь. Т.е. после восстановления соединения, на робота обрушится целая пачка разных комманд одновременно. Для проверки соединения в библиотеке есть специальные функции. Я, наоборот, специально блокирую кнопки, чтобы не посылать дважды уже принятую комманду.
EdGull » 27 дек 2010, 21:58
может тогда отказаться от скайпа?
=DeaD= » 27 дек 2010, 22:09
Проблем то - отправлять с командой TimeStamp и всё.
Старые команды не выполнять.
yak-40 » 27 дек 2010, 22:27
Может управлять как луноходом?
Команда + время работы или пройденое расстояние.
Наример: налево 3 сек. Или прямо 40 см.
И визуальный контроль.
Виктор Казаринов » 27 дек 2010, 22:41
На Луне довольно просторно. А в помещении и кошка или рука ребенка может под робота попасть за это время. Луноходность потребует большей автономности. А кому это надо? Задержки могут составлять от долей секунды до нескольких секунд. Это легко определить по обычному видеочату. Особенно "приятны" будут повороты на скорости, когда в камеру еще не видно то направление, куда происходит поворот.
Grem » 27 дек 2010, 22:54
после восстановления соединения, на робота обрушится целая пачка разных комманд одновременно.
Если после восстановления запретить выполнение команд на пару секунд - ничего плохого не случится. Либо как Дед предложил - использовать TimeStamp.
повороты на скорости
Мы в гонках участвовать собрались? Это же ПЫЛЕСОС! Какие нафиг скорости? Та же румба быстро ездит?
Myp » 27 дек 2010, 22:55
ну если у кого инет плохой то это его проблемы, а не клеардроида

вроде не стояла задача сделать управление дроидом по плохому каналу