Технический форум по робототехнике.
EdGull » 15 дек 2010, 01:01
Необходимо разработать систему управления роботом и передачу видео через Skype.
Здесь будет ТЗ
скайп или браузер
браузер предпочтительней
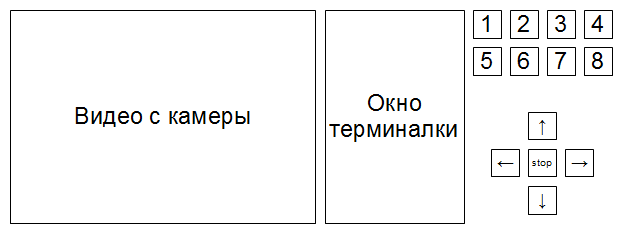
выглядеть должно вот так
кнопки должны иметь возможность переименновываться и менять отсылаемую строку
yak-40 » 27 дек 2010, 22:55
Виктор Казаринов писал(а):На Луне довольно просторно. А в помещении и кошка или рука ребенка может под робота попасть за это время.
Ну, дык, не надо давать ему много свободы

Чуть проехал, посмотрел, всё нормально? можно дальше.
Как бы импульсно ехать...
Виктор Казаринов » 27 дек 2010, 22:58
Черепахоид? Дрыгоход? Лепо.
yak-40 » 27 дек 2010, 23:16
Ну у него же должна быть автономность в виде разных режимов работы (я пылесос имею в виду)
Включаем определённый режим, наслаждаемся, включаем другой, опять смотрим. Ну а если надо поуправлять, то можно и импульсно,по черепаши. Может и нелепо, зато надёжно
А потом, от кошек и детей бампера должны срабатывать...
Grem » 28 дек 2010, 18:38
Тестировал отправку/получение сообщений. Отправлялись всю ночь периодичностью в 10 секунд. Связь ни разу разорвана небыла. Минимальное время доставки сообщения 0.17с., максимальное - 2.49с.. Так что особых проблем не вижу.
=DeaD= » 28 дек 2010, 20:21
Абсолютные минимум и максимум это ерунда, надо смотреть их только откинув 5% самых медленных и самых быстрых сообщений.
Scorpio » 28 дек 2010, 23:34
Grem писал(а):Тестировал отправку/получение сообщений. Отправлялись всю ночь периодичностью в 10 секунд. Связь ни разу разорвана небыла. Минимальное время доставки сообщения 0.17с., максимальное - 2.49с.. Так что особых проблем не вижу.
А видеоканал при этом был включен?
В принципе для пылесоса задержки действительно некритичны. Основная комманда у него "начать уборку" и то, если дома забыл назначить время уборки. А остальное, это развлекательные опции, которыми пользователь быстро наиграется.
Grem » 29 дек 2010, 01:26
=DeaD= писал(а):Абсолютные минимум и максимум это ерунда, надо смотреть их только откинув 5% самых медленных и самых быстрых сообщений.
Ок, не знал, но все равно сообщений с временем >1.5с. было около 3%.
Когда в универе на вышке читали статистику - меня небыло, т.е. целый семестр 
видеоканал при этом был включен?
Конечно же.
Grem » 30 дек 2010, 03:33
1. В терминалке принятые/отправленные отображать как авр писал - <,>?
2. Сообщение считать отправленным когда его скайп послало, либо мы нажали энтер? Порой это отличное друг от друга время.
3. Может контроль доставки сообщений замутить?
EdGull » 30 дек 2010, 09:35
1. да
2. когда его скайп послало
3. в следующей версии
Grem » 30 дек 2010, 17:53
1. Что должно прити на сервер, чтоб он подключился к ком порту?
Можно, например, connect COM1 115200.
2. Нужна ли возможость смотреть доступные порты? Если да, то опять же пример команды.
3. Какие еще нужны?
4. В RC какой набор функций должен быть?
EdGull » 30 дек 2010, 18:34
1. ничего, он должен всегда быть подключенный к выбранному сом-порту.
2. нет. Настройка порта и кнопок прописывается в ini-файле.
3. пока никаких.
4. не понял вопроса.
Grem » 30 дек 2010, 18:47
1. А если соединение оборвется, а никого рядом нет? Мне кажется, что нужна возможность восстановить подключение удаленно.
2. Раз надо - сделаю. Сейчас - ПКМ на кнопку и можно писать команду для нее, убрать? Мне кажется так удобней, чем вручную редактировать ини файл. А пример подключения к ком порту я парой страниц выше приводил, не подходит?
4. Как узнать, готово ли приложение ? RC - релиз кандидат.
EdGull » 02 янв 2011, 12:22
Grem » 02 янв 2011, 13:41
Да ну, я не стал бы пользоваться ввиду платности и то, что они записи на сервере хранят, а вдруг я кокаин фасую по вечерам
EdGull » 02 янв 2011, 14:19
да причем тут они?
я интересовался мнением по по воду их мнения на базе чего делать