Если бесплатно, то, вероятно, в Русандройде согласятся.
Только ведь бесплатно им будет мало - они потребуют ещё и дополнительно приплатить им, за проявленный ко мне интерес
И за бугром о моих разработках знают, но там не могут простить нам таблицы МЕНДЕЛЕЕВА, не могут простит СПУТНИК, не могут протсить ГАГАРИНА… , а здесь раз - и: „Опять эти русские придумали!!!“ - Непорядок!… Поэтому они знают, но делают вид, что не знают ___________________________________________________
Я, говоря честно, не знаю, что делать - пока работаю в стол.
Предложите Андроидной технике свою помощь при примерно средней зарплате конструктора у них и выложите их слова здесь для людей интересующихся робототехникой.
Объясните - это универсальный симулятор виртуальной реальности, который можно использовать для летчиков (авиасимуляторы стоят $миллионы), танкистов, для любой профессии где нужно под нагрузкой точно управлять телом.
Годовой оборот денег на мировом рынке универсальных симуляторов (костюмов телеприсутствия) к 2040г будет больше, чем на мировом рынке новых автомобилей.
Они вашими патентами и разработками Александр, забьют себе крупную долю на мировом рынке к 2030г. А их пропитанная гарью и парами самогона деревня Магнитогорск станет покруче виртуального мегаполиса Нью-Васюки.
Как пишет Fortune, 23-летняя блоггерша Snapchat, Кэрин Марджори создала AI-аватар, который готов быть вашей девушкой на $1/минуту. Инфлюэнсер имеет 1,8 млн подписчиков в Snapchat. Ну девушка девушкой, с другой стороны технология, позволяющая создание избранного Вами образа, не вызывающего у собеседников негатив, который на разных языках может вместо Вас, в Вашей манере и стиле, или предпочтительных персон, вести диалог на разные, или запланированные темы с собеседниками. Я бы такого с удовольствием принял в штат своего стартапа на роль адвайзера. Пусть учтиво и терпеливо отвечает круглые сутки на вопросы исходя из данных на сайте продукта, питчит, дает рекомендации и линки, общается в зумах, и прочих митапах. Мечта любого стартапера. Что-то во мне екнуло и я приступил к наполнению своим контентом сведений о продукте стартапа, конечно под своим профилем на ChatGPT, чувствую что это не предел... Демонстрация в работе финансового консультанта:
После того что я здесь выше описал, мне дико захотелось в ChatGPT 3.5 создать контент, который будет максимально наполнен всеми сведениями и публикациями о продукте моего стартапа. Цель быстро генерировать сжатые и компетентные ответы, и другие вопросы, которые могут требовать быстрых ответов или публицистических решений связанных с нашим программно аппаратным[urlhttps://www.beeptoolkit.com/]продуктом[/url].
Возможно кто либо хочет здесь увидеть работу такого приема, Вы можете задавать здесь, в контексте в.с. свои вопросы, и я буквально с 1 пинка буду переадресовывать их и генерить GPT ответы.
Новости: Правительство России озаботилось осуществлением "Межтрансферного маневра" - освоением дальних (глубинных) территорий страны:
На мой взгляд технология "Дистанционно управляемый антропоморфный робот-аватар" очень хорошо подходит для этого - ведь для роботов не надо строить капитальные теплые жилые помещения, им не нужна канализация для удаления отходов жизнедеятельности, не нужны фрукты-овощи и прочая еда, не нужна одежда, кинотеатры и пр. - нет необходимости организовывать т.н. Северный завоз. Учитывая большую протяженность России с Востока на Запад. Роботы-аватары под дистанционным управлением смогут работать круглосуточно, управляемые людьми из различных часовых зон (люди в разных городах получат рабочие места по профессии "оператор антропоморфного робота-аватара").
Управлять роботами-аватарами можнА из уже существующих привычных дипрессивных зон обитания человеков (из человейников) с высоким уровенем безработицы (так капиталистам выгодней будет - можно меньше платить зарплату, чем в столице)
ЗАДЕРЖКА УПРАВЛЕНИЯ РОБОТОМ-АВАТАРОМ равна времени задержки приводов костюма телеприсутствия при передаче оператором сигнала андроиду + время передачи сигнала по линии связи к роботу-аватару + время задержки отработки сигнала оператора приводами робота-аватара + время передачи сигнала о выполненном движении по линии связи от робота-аватара к оператору + время задержки отработки приводами костюма телеприсутствия сигнала от робота-аватара.
ЗАДЕРЖКА УПРАВЛЕНИЯ РОБОТОМ-АВАТАРОМ равна удвоенному времени передачи сигнала в одну сторону + удвоенное время работы приводов костюма телеприсутствия + время отработки сигнала приводами робота-аватара.
0,02сек – задержка управления магнитореологической муфтой сцепления в быстродействующем электроприводе японского андроида Asimo. На 6000км от костюма телеприсутствия до робота-аватара суммарное время двухкратного прохода лазерного сигнала (радиосигнала) обратной связи 0,04сек + две задержки приводов костюма телеприсутствия по 0,02сек + задержка приводов андроида 0,02сек.
Итого общее время задержки управления андроидом 0,1сек на расстоянии 6000км. Реакция мозга человека ~0,1сек – 10Гц средняя частота (альфа-ритм мозга) опроса мозгом пропорциональных биодатчиков силы, удлинения мышц человека.
6000км – радиус дистанционного управления роботом-аватаром по прямому лучу. При передаче сигнала по кабелям или спутникам радиус дистанционного управления роботами-аватарами скорее всего будет ~2000км от оператора.
Задержка не больше 0,1сек – обучать работе в костюме телеприсутствия не требуется.
Часто прерывается сигнал, велика задержка управления – оператор включит режим «ПРОГНОЗ» – по изменению угловой скорости и скорости роста силы, по траектории рук и ног софт заранее двигает приводы андроида, костюма телеприсутствия. В настройках оператор уточнит цифры и алгоритм прогноза.
ЗАЩИТА ОТ ПРЕРЫВАНИЯ СИГНАЛА ОТ ПЕРЕКЛЮЧЕНИЯ МЕЖДУ СПУТНИКАМИ: паралельное подключение – ещё не кончил передачу сигнала спутник-А, подключается спутник-В дублируя сигнал обратной связи.
ПРИ ПРЕРЫВАНИИ СИГНАЛА обратной связи андроид сохраняет работу части алгоритмов и предыдущие цифры сигнала, кроме исключений Алгоритма прерывания сигнала, выполняющего список необходимых действий андроида для минимума ущерба.
При потере устойчивости андроида или прерывании сигнала обратной связи андроидом управляет СИСТЕМА УСТОЙЧИВОСТИ АНДРОИДА с алгоритмами: 1.алгоритм продольной устойчивости андроида: по центру масс и вектору инерции поддерживает устойчивость движения андроида в продольной вертикальной плоскости центра масс андроида и отдельно груза в его ладонях. Сохраняет параметры (установки на ускорение, спуск, подъем) ходьбы и бега андроида, останавливает его по установкам оператора. Ограничивает продольно-горизонтальное ускорение телекамер головы и ладоней андроида 2.алгоритм поперечной устойчивости андроида: устойчивость движения в поперечной вертикальной плоскости центра масс андроида и отдельно груза в его ладонях. Ограничивает величину перемещения (установки реакции на ускорение, наклонную поверхность ходьбы) вбок андроида в ходьбе, поднятии тяжести. Ограничивает поперечно-горизонтальное ускорение телекамер головы и ладоней андроида 3.алгоритм вертикальных движений: устойчивость движений по вертикали центра масс андроида и отдельно груза в его ладонях. Стабилизирует по вертикали телекамеры андроида, ограничивает вертикальное ускорение телекамер головы и ладоней андроида.
УСТАНОВКИ ОПЕРАТОРА В СИСТЕМЕ УСТОЙЧИВОСТИ АНДРОИДА: 1. оператор уточняет угловую скорость отклонения вперед-назад от вертикали линии «центр масс – мгновенный центр опоры ступней андроида», при превышении которой и отсутствии трафика сигнала начинает работать алгоритм продольной устойчивости андроида 2. оператор уточняет угловую скорость отклонения вправо-влево от вертикали линии «центр масс – мгновенный центр опоры ступней андроида», при превышении которой и отсутствии трафика сигнала работает алгоритм поперечной устойчивости андроида 3. оператор уточняет цифру размаха знакопеременных вертикальных движений центра масс андроида и отдельно эту цифру для груза в его ладонях, при превышении которой и отсутствии трафика сигнала работает алгоритм вертикальных движений 4. оператор уточняет цифру ускорения вертикальных движений центра масс андроида и отдельно эту цифру для груза в ладонях андроида, при превышении которой и отсутствии трафика работает алгоритм вертикальных движений 5. установки параллельного режима работы алгоритмов устойчивости андроида, в котором алгоритмы работают независимо от сигнала обратной связи.
Алгоритмы сохраняют угловую ориентацию груза в ладонях андроида, уменьшают ускорения движения его центра масс по вертикали. Груз в ладонях андроида: пулемет, дальнобойный тепловизор...
СИСТЕМА УСТОЙЧИВОСТИ АНДРОИДА непрерывно подстраховывает андроида от проблем ходьбы и бега, которых не было в сигнале от оператора. Для этого в ступнях андроида 3D-датчик линейного ускорения, сигнал (установки оператора) идет в приводы ступни оператора при превышении критических цифр ускорения ступни андроида. Критические цифры таблицами привязаны к скорости движения андроида.
В беге если Алгоритм Безопасности Бега Андроида АББА обнаружит – сигнал от оператора уронит андроида – АББА включит собственный алгоритм бега андроида, подгоняя скорость андроида к цифрам сигнала от оператора. Оператору чтоб умышленно уронить андроида надо выполнить кистью жест «УРОНИТЬ АНДРОИДА».
Оператор может в АББА включить режим «ХОДЬБА», уточнив диапазон скоростей. АББА не дает дает превысить критические угловые скорости и углы устойчивости вертикального положения андроида во время бега.
Продольный критический угол туловища – угол между вертикалью и проекцией на продольную вертикальную плоскость бега андроида линии, соединяющей центр масс андроида и точку опоры ступни в момент максимальной силы толчка этой ступни. Если Продольный критический угол туловища меньше нормы (наклон слишком назад) – алгоритм уменьшает угол колена в нулевой точке шага. Если Продольный критический угол туловища больше нормы (наклон слишком вперед) – алгоритм увеличивает угол колена в нулевой точке шага.
Нулевая точка шага – точка в которой приземление с торможением переходит в разгон: продольное ускорение центра масс туловища равно нулю.
Продольная вертикальная плоскость бега – вертикальная плоскость проходящая через центр масс андроида и параллельная вектору движения андроида.
Левый поперечный критический угол туловища – угол между вертикалью и проекцией на поперечную вертикальную плоскость бега андроида линии, соединяющей центр масс андроида и точку опоры левой ступни в момент максимальной силы толчка этой ступни.
Поперечная плоскость бега – вертикальная плоскость проходящая через центр масс андроида и перпендикулярная продольной плоскости бега.
Правый поперечный критический угол туловища – угол между вертикалью и проекцией на поперечную вертикальную плоскость бега андроида линии, соединяющей центр масс андроида и точку опоры правой ступни в момент максимальной силы толчка этой ступни.
АЛГОРИТМ ПРОДОЛЬНОГО, ПОПЕРЕЧНОГО УГЛОВ СТУПНИ шагающего аватара-андроида работает независимо (исключения: установки оператора) от оператора: 1. поперечный угол ступни стремится к нулю. Алгоритм-1 управляет жесткостью подвески ограничителя отклонения от нуля поперечного угла ступни, графиком (зависимости жесткости подвески от её хода) прогрессивной подвески. Жесткость подвески нарастает при увеличении скорости ходьбы (бега) аватара-андроида, при уменьшении процентной вязкости поверхности куда приземляется ступня. Алгоритм-1 управляет поперечным углом ступни по цифрам 2-х передних датчиков силы ступни 2. в ходьбе (беге) андроида на поворотах поперечный угол ступни устанавливают датчик поперечного центробежного ускорения андроида, два передних датчика силы ступни 3. продольный угол ступни имеет в таблицах стандартную цифру угла. Цифра зависит от скорости ходьбы (бега) аватара-андроида и наклона голени от поперечной вертикальной плоскости андроида, от процентной вязкости (таблицы) поверхности приземления ступни. Алгоритм-2 дает стандартную цифру продольного угла ступни. Ступня андроида имеет сгибающийся вверх носок из двух широких пальцев. Алгоритм-2 устанавливает отдельно каждому из 2-х пальцев носка ступни стандартную цифру угла отклонения на всех режимах работы 4. есть прогрессивная подвеска ограничителя продольного отклонения ступни андроида от стандартной цифры, устанавливаемой алгоритмом-2 в зависимости от наклона голени от вертикали.
Прогрессивная подвеска ограничителя продольного отклонения ступни андроида регулируется отдельно по вертикальному ходу подвески, отдельно по продольному ходу подвески назад при продольном столкновении ступни с выступающим вверх препятствием.
АЛГОРИТМ РОВНОЙ ХОДЬБЫ, БЕГА: туловище андроида заваливается вбок-влево (вправо) от выбранного пути – увеличить силу и время опоры на левую (правую) ногу, уменьшить на другую, пока туловище не перестанет заваливаться вбок.
В режиме «ПРОГНОЗ» при средней задержке управления алгоритм дает симулируемый толчок на ступню оператора раньше на расчетное время задержки управления. С возможностью для оператора вручную выставлять процентную зависимость «задержка управления – время упреждения». При большой задержке управления алгоритм симулирует среднюю за 2-4 шага силу на ступне андроида, с учетом вектора скорости и средней высоты приземления ступни андроида.
В беге силу инерции туловища после каждого толчка ногой симулирует кратковременный шаговый наклон оператора назад поворотом ОСИ-2 3D-КАРДАНА подвеса оператора. Наклон прямо пропорционален силе инерции туловища андроида после толчка ногой.
АЛГОРИТМ ЗАХВАТА ПРЕДМЕТА: после захвата предмета оператором, алгоритм вычисляет стандарт средней силы сжатия кистью предмета за 3-4сек после его захвата кистью. Далее при небольших колебаниях силы захвата оператором или прерывании обратной связи привод поддерживает силу сжатия предмета кистью андроида не меньше стандарта средней силы-1 сжатия кистью предмета, чтоб андроид не уронил предмет.
Чтоб разжать пальцы с предмета оператор должен приложить к своим пальцам силу-2, которая равна силе-1. Оператор может процентным коэффициентом установить силу-2.
В алгоритме разные процентные коэффициенты для стационарных (больше) и перемещаемых рукой оператора предметов. Оператор может выбрать алгоритм захвата предмета с списка алгоритмов захвата, изменить цифры в выбранном алгоритме.
АЛГОРИТМ ПОДЪЕМА ПО ВЕРТИКАЛЬНОЙ ЛЕСТНИЦЕ основан на распознавании изображений и разнесенных датчиках ускорения туловища андроида. При большой задержке управления алгоритм поможет андроиду лезть вверх по жесткой или веревочной лестнице.
Алгоритмы СИСТЕМЫ УСТОЙЧИВОСТИ АНДРОИДА более подробно здесь: institutrobotov.ru/#7
ДИСТАНЦИОННЫЕ ЕДИНОБОРСТВА В КОСТЮМАХ ТЕЛЕПРИСУТСТВИЯ В костюмах телеприсутствия можно проводить спаринги по борьбе на расстоянии до 6000км. Кроме силовой обратной связи нужны вычислительные ресурсы серверного компьютера, 3D-сканы их тела. Положение человеков в пространстве компьютер определяет по углам зажимных рам рук, ног, туловища.
Общую систему координат обоих борцов компьютер определяет по вычисленной поверхности пола + 2-3 точки контакта борцов (захваты руками, подсечки). Высоту расположения этих 2-3 точек контакта компьютер определяет по углам зажимных рам рук и ног, по наклону туловищ борцов по двум осям от вертикали.
В расчетах компьютер использует: 1. цифры датчиков силы ступней 2. силы действующие на 2-3 точки контакта (захваты, подсечки) 3. успешный бросок компьютер определяет по нулевым сигналам датчиков силы ступней одного из борцов 4. цифры траекторий угловых и линейных движений тел борцов, компьютер получает с 3D-датчиков углов и 3D-датчиков ускорений в зажимной раме туловища. Это сохраняет общую систему координат при потере контакта между борцами 5. по силе тока в управляемых муфтах сцепления группового привода компьютер вычисляет вес тел, моменты их инерции по разным осям, положение обоих тел после проведенного приема. Цифры сил тока в муфтах сцепления включаются в сигнал обратной связи.
В режиме «ПРОГНОЗ», в режиме виртуальной и дополненной реальности, команду куда вращать оси 3D-кардана подвеса оператора, дают 3D-датчики силы ступней аватара. По их цифрам и векторам силы в ступне, по положению центра масс человека софт вычисляет моменты приводов 3D-кардана.
В спарингах ударных единоборств софт по весу тел, по вектору и импульсу в точке удара вычисляет конечные угловые положения тел. Вектор удара – по разнице показаний плечевых и нижнего датчиков ускорений туловища. Импульс – по величине суммарного вектора датчиков ускорения туловища. Конечные положения тел софт также корректирует через видеоканал и каналы датчиков.
ДИСТАНЦИОННЫЙ СЕКС МУЖЧИНЫ С ЖЕНЩИНОЙ Аналогичны вычисления серверного компьютера для дистанционного секса между мужчиной и женщиной в костюмах телеприсутствия на расстоянии до 6000км. При частом пропадании или задержке сигнала включается режим «ПРОГНОЗ».
В режиме «ПРОГНОЗ» обратную связь с датчиками силы (у них приоритет) софт дополняет Стандартной моделью сминаемости тела человека для ограничения во время секса давления на твердые части тела.
В Стандартной модели: несминаемые части – кости, части тела с разным уровнем сминаемости по 3 координатам. Сминаемость в глубину, продольный сдвиг, поперечный сдвиг мягких тканей тела. Стандартные модели сминаемости тела (их ~100) софт выбирает по файлам личных настроек операторов.
-------------------------------------
ОТВЕТ beep_beam
Вы занимаетесь нейронным ИИ. Меня как разработчика ИИ больше интересует алгоритмический ИИ, принципы и структура которого изложены здесь: institutrobotov.ru/#48
Алгоритмический (на обычных алгоритмах) ИИ отличается от ИИ нейронных сетей тем, что: 1. логически прозрачен. Можно протоколировать каждый шаг алгоритма. Каждый шаг алгоритма однозначен 2. полностью предсказуем в смысле безопасности для общества. Если ИИ нелоялен к пользователю, настраиваем уровень лояльности: слегка изменим некоторые таблицы, процентные коэффициенты алгоритмического ИИ. На уровне интеллекта ИИ это не отражается. Реакция ИИ нейронных сетей в сложных случаях непредсказуема, любая реакция алгоритмического интеллекта точно просчитывается 3. для нейронного ИИ вероятность создать антивирус по алгоритмам работы ИИ слишком мала для военных и некоторых коммерческих целей 4. алгоритмический ИИ отличает от нейронного ИИ универсальность, быстрота перехода на новые темы, легкость обобщения понятий, быстрота создания целей 5. уровень интеллекта нейронного ИИ прямо зависит от качества баз данных, на которых он тренировался и не даст ничего, чего нет в базах данных. В вопросах без подходящих баз данных, например для изобретательства или интуиции, требуется обобщенное абстрактное мышление, в котором алгоритмический ИИ как универсальная система алгоритмов и абстрактных моделей, имеет подавляющее превосходство над нейронными сетями с машинным обучением 6. алгоритмический ИИ превосходит ИИ нейронных сетей в задачах требующих логики, планирования; поиска связей между объектами, процессами 7. в задачах имеющих однозначное решение ИИ нейронных сетей могут обмануть специалисты по алгоритмам. Алгоритмический ИИ маловероятно обмануть 8. алгоритмический ИИ потребляет энергии в тысячи раз меньше ИИ нейронных сетей 9. алгоритмический ИИ потребляет памяти компьютера в тысячи раз меньше ИИ нейронных сетей 10. алгоритмический ИИ сначала эволюционирует медленно, затем скорость эволюции начнет расти в квадрате. Нейронный ИИ эволюционирует линейно
beep_beam писал(а):Демонстрация в работе финансового консультанта:
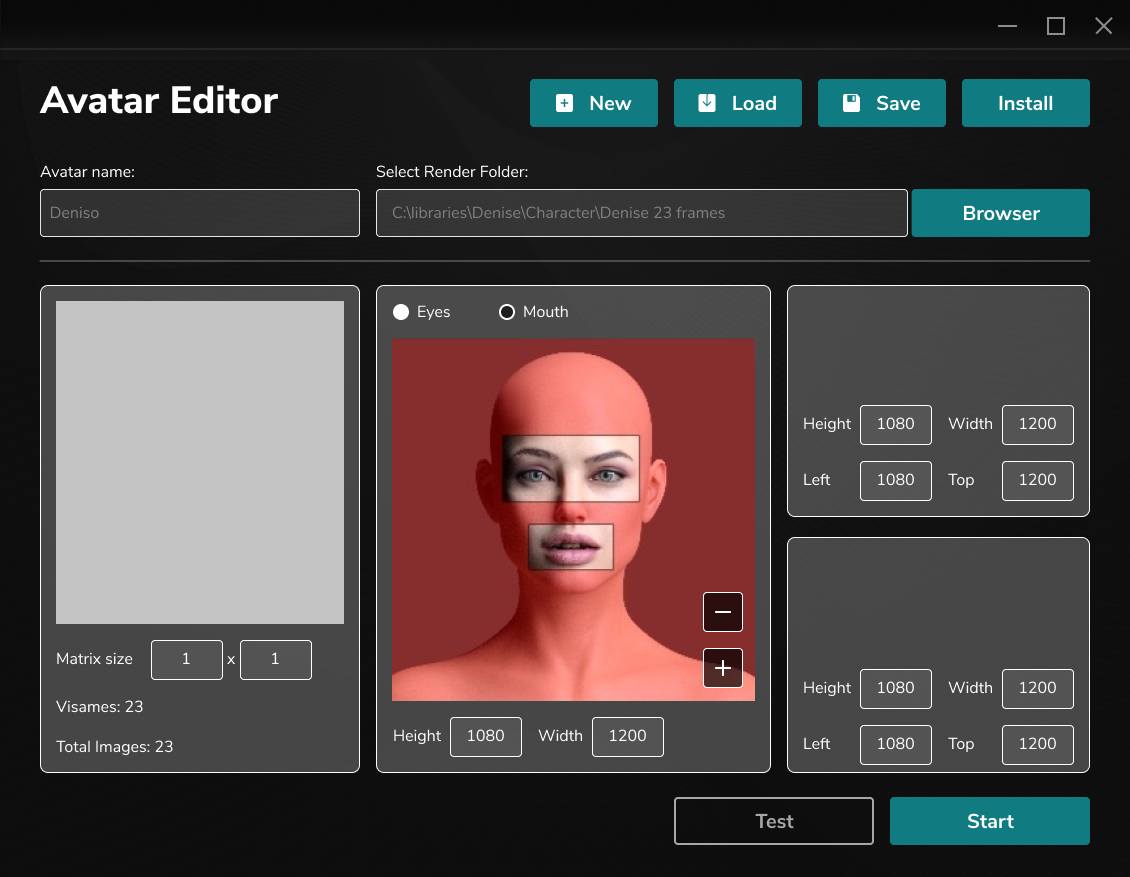
Чем радикально эта кукла лучше той, что я сделал на коленке в 2011 году, которая умела моргать и проявлять некоторые эмоции? Я тогда не сделал движение головой и телом, но это не было проблемой.
Тут главное - то, что именно вещает она. А фотореалистичный внешний вид я смог бы легко сделать и тогда, в 2011 году, заменив рисунки на фрагменты фото, полученным из видеопотока для создания слитных движений.
Виктор Казаринов писал(а):Демонстрация в работе финансового консультанта:
На рынке ОЧЕНЬ много решает „обёртка (упаковка) товара“. Допустим, если есть две книги для маленьких детей одного и тогож автора: в одной только мелкий текст и нет рисунков (ну или рисунки скучные черно-былые)
и книга другого издателя, у которой совсем другое оформление - хорошая бумага, четкий текст большого размера и КРАСОЧНЫЕ ЦВЕТНЫЕ КАРТИНКИ!!! Как Вы думаете, какую книгу предпочтут купить СВОИМ детям родители?
Так и в Вашем случае с какой программой будет мужику приятней общаться? С той, где красивая чувиха или с плоской мультяшкой? Вот и ответ на ваше возмущение.
Красивая обёртка (хорошая реклама) - двигатель торговли. Будь ваша программа в 1000 раз лучше, но без оформления (интерфейса) ей будет трудно найти выход на рынок.
Томас Эдисон писал(а):ДИСТАНЦИОННЫЙ СЕКС МУЖЧИНЫ С ЖЕНЩИНОЙ
Ну, Томас Ахметович, в нашем пуританском обществе это публично обсуждать как-то не принято (тем более, что этот форум могут просматривать несовершеннолетние < 18+) (Ну, или наоборт, эта специфическая тема будет принята на ура ) Но пугает слово "Прогноз" Есть даже бородатый анекдот на эту тему: мужик из деревни уезжает в длительную командировку, покупает жене сексробота „Борю“, говорит жене - захочешь - скажешь "Боря, давай!"… Вернулся - в деревни на улице ни души - все попрятались, жены дома нет, случайно нашел старушку - та говорит: "Тихо!!! Прячься!!! Здесь - где-то Боря маньяк ходит!!!!" (И что, будет, если управление перехватит сексуальный маньяк )
Scorpio писал(а):На самом деле уже давным-давно делают различные редакторы
Даже в 2011 году были плагины анимации лица и рта на 3D моделях. Можно было точно таких же реалистичных аватаров делать.
Aleks писал(а):На рынке ОЧЕНЬ много решает „обёртка (упаковка) товара“. Допустим, если есть две книги для маленьких детей одного и тогож автора: в одной только мелкий текст и нет рисунков (ну или рисунки скучные черно-былые)
В нашей стране есть требования к детской литературе, а именно к размеру шрифта и прочим параметрам страницы. Поэтому ваш пример не очень убедителен. Однако понятна психофизиология восприятия лудей и особенно детей. Это вовсю стали эксплуатировать комикодеятели. И сейчас выросли целые покоения гонящихся за оберткой. Но есть поговорка: встречают по одежке, провожают по уму. Красивая обертка обычно после двух минут общения с аватара слетает.
Aleks писал(а):Так и в Вашем случае с какой программой будет мужику приятней общаться? С той, где красивая чувиха или с плоской мультяшкой? Вот и ответ на ваше возмущение.
У меня нет возмущения. Лишь констатация фактов.
Aleks писал(а):Красивая обёртка (хорошая реклама) - двигатель торговли. Будь ваша программа в 1000 раз лучше, но без оформления (интерфейса) ей будет трудно найти выход на рынок.
Сейчас нужно что-то действительно работающее а не тонны желтой прессы в глянцевой обложке и с броскими заголовками.
ЦИТАТА (Aleks): управление перехватит сексуальный маньяк
ОТВЕТ: у маньяка Бори нет шансов КРАСНАЯ КНОПКА БЕЗОПАСНОСТИ останавливает карданный подвес оператора в безопасном для оператора положении тела – экстренный разжим двух половинок гаек всех винтов регулировки длины зажимных рам костюма телеприсутствия. Автомат безопасности отключит интернет, компьютер костюма телеприсутствия. До остановки карданного подвеса оператора автомат безопасности блокирует приводы регулировки длины зажимных рам экзоскелета.
Аналоговый автомат безопасности не дает независимому компьютеру безопасности разжать половинки гаек регулировки длины зажимных рам до остановки карданного подвеса в безопасном положении тела оператора.
Голосовое управление красной кнопкой безопасности через микрофоны-ларингофоны в зажимной раме туловища у шеи. Нет сигнала от ларингофонов – независимый компьютер безопасности выключит костюм телеприсутствия, выведет сообщение на экран. Оператор в компьютере безопасности может установить жест включения красной кнопки.
Компьютер безопасности по цифрам датчиков угла не дает рукам коснуться шлема.
Внешние концевые выключатели экзоскелетов рук отключают движение в сторону поверхности, с которой столкнулся экзоскелет руки. Концевые выключатели дублированы ультрафиолетовыми дальномерами работающими по алгоритму.
Владелец костюма телеприсутствия по Закону использует зарегистрированную КРИПТОЗАЩИТУ ОБРАТНОЙ СВЯЗИ «КОСТЮМ ТЕЛЕПРИСУТСТВИЯ – АНДРОИД»: у команд обратной связи псевдослучайный номер, метки начала, окончания кода команды. В следующей команде другие номер, шифр + метки начала конца команды. Допуски времени на части сигнала, переходы между ними. Псевдослучайная длина пакетов цифровой связи.
В регистратор время, направление приема предыдущего сообщения андроидом. Динамический шифр привязан к дате, времени суток. Отключаются секторы диаграммы направленности фазированных антенн робота откуда ложные команды.
Псевдослучайный перескок частоты по динамическому шифру. Ретрансляторы с нескольких азимутов направлений прихода сигнала динамическим шифром переменной задержки сигнала блокируют пеленгаторы. Каждый андроид – ретранслятор других андроидов.
ЗАЩИТА ОТ ХАКЕРОВ: компьютер безопасности костюма телеприсутствия сводит к нулю вероятность нанесения хакерами увечий пользователю костюма телеприсутствия: он не связан с любыми другими компьютерами, не подключен к линии обратной связи или интернету, информационные системы костюма телеприсутствия изолированы друг от друга. Связь необходима – односторонняя с оптической или гальванической развязкой.
Тариф андроидов по времени суток, территории. Ответственность по УК: выход за пределы территории; незаконное управление; подделка идентификации; подделка госпароля; использование прокси-сервера; аватарное убийство; телесное повреждение установкой опасных ускорений, сил, углов в костюме телеприсутствия; использование электромагнитных помех, сверхярких световых свеч (засвечивают картинку телекамер) против полицейских андроидов.
Андроиды законом снабжены известным госорганам госпаролем перехвата управления. Радиоканал полицейских андроидов дублирован от помех стационарными, мобильными средствами узконаправленной (обратной связью с приемником) гиростабилизированной лазерной связи.
__________________
ЦИТАТА (Виктор Казаринов): В нашей стране есть требования к детской литературе, а именно к размеру шрифта и прочим параметрам страницы.
ОТВЕТ: в России с 1970-х есть исключительно важный для десятков миллионов людей в рунете ГОСТ на контрастность текста. Робофорум, половина сайтов интернета и половина бумажных книг к сожалению грубо нарушают этот самый важный в мире государственный стандарт ГОСТ, используя светло-серый шрифт на белом фоне. Есть подозрение - подобные сайты и оформление книг делают очень злобные садисты-дизайнеры, которые балдеют сознавая что они светло-серым шрифтом на белом фоне причиняют неслабые мучения части читателей рунета и бумажных книг. Пытки домашним животным запрещены, вот возможно измученные УК садисты, пытаются найти отдушину в интернет-садизме и в книжных издательствах.
Томас Эдисон писал(а):ОТВЕТ: у маньяка Бори нет шансов
В анекдоте речь шла об АВТОНОМНОМ роботе Боре. Забыв сообщить жене команду выключения муж обрек всю деревну на то, что автономный робот весх зацелует (скажем так).
По части защиты каналов связи с роботами: Вам, Томас Ахметович, к военным надоть обратиться - сейчас актуально. Только, подозреваю, что специалисты, которые этим занимаются у вояк, Вас к "финансовому корыту" не допустят - таковы правила рынка.
Виктор Казаринов писал(а):У меня нет возмущения. Лишь констатация фактов.
"Реклама - двигатель торговли" - Это не я придумал - крылата фраза.
Очень важны: упаковка, обёртка, ярлык, лейбл и пр.
Управляемые через костюм телеприсутствия ВОЕННЫЕ АНДРОИДЫ ДЛЯ ГОРОДСКИХ БОЕВ сверхживучи в сравнении с обычным солдатом. Эксперты по телеметрии найдут в бою ключевых андроидов-аватаров с лучшей позицией и сохранностью, подключат к лучшим операторам. После боя андроиды соберут с остатков андроидов новых андроидов: можно иметь в боях миллионы андроидов. Конструкция андроида оптимизирована на сборку андроидами.
Когда в поле боя равные силы – позиционная война – чтоб пройти 100м в городе отдают жизни десятки тысяч солдат. Жизнь солдата $1млн – хватит на андроид. Управляют андроидами удаленные до 6000км операторы домашних костюмов телеприсутствия.
КОСТЮМ ТЕЛЕПРИСУТСТВИЯ – ТЕЛЕПОРТ УДАЛЕННОГО СОЛДАТА обороняющего объект сотней андроидов-солдат, сотней квадрокоптеров, поочередно управляя ими при отражении атаки роты живых солдат противника. Софт андроида (квадрокоптера) по микрофонам определяет траекторию самой близко пролетевшей пули – по разница в времени прихода звука, по кривой эффекта Доплера + триангуляция + скорость пули по уровню близости к Z-графику ударной волны. Дальнобойные датчики звуковых, сейсмических волн.
Софт костюма телеприсутствия находит андроида или квадрокоптер, к которому наиболее близко прилетела пуля, переключает на него оператора, показывая в экране расположение (телекамеры андроидов и квадрокоптеров) андроида (квадрокоптера) и противника. Оператор выбирает ракурс телекамер, алгоритм работы софта, уточняет цифры в выбранном алгоритме.
Автомат сопровождения цели на экране, с передачей метки цели с точным временем кадра, обеспечит высокую точность выстрелов даже с большой задержкой сигнала. Искусственный интеллект ИИ андроида прокрутит кадры назад для покадрового распознавания и сопровождения метки на цели.
Автомат сопровождения цели вместе с ИИ автоматически уничтожит её в самое уязвимое место с малым расходом боеприпасов. Быстродействие «сработал датчик – выстрел» военных роботов с ИИ не хуже 0,003сек, живого солдата от 0,3сек до 3сек.
АНДРОИД-ЗАПРАВЩИК включает ультразвуковой сигнал опознавания «свой-чужой». Зная таблицу стандартного времени излучения ультразвука, андроид-солдат двумя разнесенными микрофонами определяет расстояние, направление до андроида-заправщика. Посылает ультразвуковой ответ. Андроид-заправщик снимает с андроида-солдата коробку-рюкзак с аккумулятором, закрепляет свежую коробку-рюкзак с аккумулятором, боеприпасами.
Операторы роботов-аватаров – геймеры многопользовательских онлайн-войн, чемпионатов. Статус, оплата наемника-оператора по результатам чемпионатов, покадрово оцениваемых экспертами.
Военные аватар-сайты в условиях близких к реальным обучат военных в компьютерных виртуальных сражениях любого масштаба, ограниченного только числом реальных участников. Ранения софт симулирует ограничивая приводы, датчики виртуального аватара или костюма телеприсутствия.
Для защиты оптики от пулеметов у военного андроида сверхтвердые зеркала-перископы телекамер с прогрессивной (жесткость плавно растет до бесконечности как в подвеске заднего колеса кроссового мотоцикла) 3D-подвеской – ослабит импульс пуль, осколков с любым вектором удара.
Зеркала с вольфрам-молибденового сплава с отражающим покрытием с легкоплавкого сплава. Появилась царапина от пули – пустим ток по зеркалу – легкоплавкое покрытие из сплава индия плавится, застынет на зеркале без царапин (поверхностное натяжение жидкого сплава).
Андроиды-солдаты имеют импульсный рентгеновский прожектор с рентгеновским зрением сквозь стены на отраженных рентгеновских лучах, микроволновое зрение сквозь стены. Андроиды-солдаты передают друг другу видео узконаправленными ультразвуковыми лучами.
На 2км в условиях гонки мощностей узконаправленными лучами непрерывно блокировать все частоты электромагнитных волн маловероятно. Многочастотная цифровая радиосвязь с псевдослучайным перескоком частоты и отправкой случайных данных в неиспользуемых частотах работает с уровнем помех 10000 раз превышающим сигнал.
Связь через ретрансляторы узкого луча на сотне частот одновременно. Автоматическая регулировка усиления: сильнее помехи – уменьшаем усиление приемников, увеличиваем мощность передатчиков. Управляет усилением датчик помех. Датчик помех – софт использующий сигнал приемника.
МОДУЛИРУЮЩИЕ УГОЛКОВЫЕ ОТРАЖАТЕЛИ (моё изобретение) без приводов, систем стабилизации дают сигналы датчиков андроида костюму телеприсутствия через модуляцию отраженной энергии лазерного луча ретранслятора. Каждое с трех зеркал модулирующего уголкового отражателя это отдельный модулятор. Он меняет яркость отраженного лазерного луча для передачи единиц, нулей цифрового сигнала.
Связь с андроидом на двух длинах лазерного луча. Длина-1 луча для фотоэлемента. Длина-2 луча для ответного уголкового отражателя с модуляцией. Андроид не тратит энергии на обратную связь, только на модуляцию. У фотоэлемента, уголкового отражателя есть фильтры на зеркалах. Модулирующие уголковые отражатели на голове, плечах и ладонях андроида.
Свой-чужой лазерный луч андроид определит по подписи с диалоговым шифром в каждом пакете информации. Подпись рассредоточена по цифрам пакета для защиты от дешифровки. При сильных помехах андроид укорачивает пакеты информации для обеих сторон обратной связи.
Вместо прямого луча можно отраженный от многих стен луч, длинную цепь андроидов-ретрансляторов. При применении противником гранат с многоспектральной дымовой завесой её ретрансляторы пробивают радиоволны синтезированные биениями двух частот лазера. Алгоритм подбирает длину синтезированной радиоволны по цифре трафика сигнала обратной связи.
Военный андроид выходя с зоны связи с рюкзака ставит ретранслятор: оптоволокно сматываясь с катушки пояса андроида сохраняет связь с ретранслятором. С андроидом за стеной радиосвязь сквозь стену, связь на рентгеновских лучах.
Передатчик цифрового сигнала рентгеновской обратной связи – рентгеновских импульсов – коаксиальный вольфрамовый резистор на который через коаксиальный кабель и конденсатор дают сверхкороткие импульсы 100кВ. Конденсатор с высокой добротностью ограничит ток, повысит крутизну заднего фронта рентгеновского импульса. Приемник цифрового рентгеновского сигнала – иодид цезия на кремниевом фотодиоде.
Городской бой военных андроидов: узконаправленная инфракрасная лазерная связь с беспилотников-ретрансляторов с ИИ выбирающим (тепловизор) поверхности отражающие луч. Инфракрасные помехи: связь терагерцовым, рентгеновским лучом.
Модулирующие уголковые отражатели спереди, сзади, сбоку, сверху андроида пронумерованы. По инерциальному навигатору, картинке тепловизора (углы прихода луча) и помехам софт (оператор) найдет какие модулирующие уголковые отражатели андроида включить.
Шаблонные реакции ИИ – установки оператора. Шаблоны: распознавание, уничтожение солдат противника в заданном координатами, временем секторе если нет ответа на опознаватель «свой – чужой».
При мощных помехах в бою оператор пробивает связь с андроидами мегаваттами узконаправленных электромагнитных волн мощного передатчика, использующего электроэнергию бесшумных газотурбогенераторов. От этих мегаваттов андроиды-солдаты не откажут: 1. микропроцессоры высоковольтные: в 99% случаев не действуют электромагнитные бомбы: наиболее вероятное напряжение наводимые в электронике андроидов в условиях городского боя 150-300В. Сегодня есть транзисторы 6000В, контролеры 500В 2. провода заменены заземленными коаксиальными кабелями или оптоволокном (оптоволокно сечением 1кв.мм передает мощность 100кВт) 3. микропроцессорный блок андроида за 4 экранами. Экраны-1-2 из меди. Между медными Экран-1 и Экран-2 поляризующее постоянное напряжение 100000В (для поляризации диэлектрика между экранами) – защита от высотной разности потенциалов от сдувания с молекул воздуха электронов гамма-лучами термоядерного взрыва на высоте 500км, сдувания электронов атомов рентгеновской обратной связью. Между экранами-1-2 диэлектрик с высокой диэлектрической проницаемостью сглаживает острые пики волн электромагнитных бомб. Экран-3 – феррит – защита от вихревых токов. Экран-4 – эрбий 167Er – защита микропроцессора от гамма и рентгеновских лучей. Экран-5 – гадолиний 157Gd – защита микропроцессора от нейтронных бомб.
Вариант для сильной радиации: ламповые микропроцессор, радиоприемник.
Штурмовой фонарь ослепит живого солдата, но не андроида – поляризационные (круговая поляризация правого, левого вращения + 2 оси линейной), спектральные фильтры телекамер. Алгоритм включения фильтра: максимум верхних частот видеосигнала + максимум суммарной длины тонких линий картинки.
Звук, ультразвук андроид-солдат ладонью передает через стену, трубопроводы приложив к ним руку с 2D-вибратором. 2D-вибратор позволяет по одной трубе одновременно отправить каналы-1 поперечной волной в трубе и канал-2 продольной волной в трубе.
Два андроида-солдата ладонными вибраторами бесшумно отправляя с двух концов трубы ультразвук, биениями двух частот могут создать посередине трубы голос оператора. И заставить источник голоса перемещаться вдоль трубы в любом направлении, чтоб запутать противника. Это можно сделать и в некоторых монолитных стенах.
БЕТОНОБОЙНЫЙ ВОЕННЫЙ АНДРОИД – внутри левого локтя гидроцилиндр, сверхтвердым концом своего штока выходящий в тыльную часть ладони. Приложив тыльную часть ладони к бетонной глыбе или скале, андроид через вакуумный разрядник дает 20000-100000В на электроды внутри жидкости гидроцилиндра. Электрогидравлический эффект Юткина – конец штока с силой сотни тонн бьет без зазора по бетонной глыбе или скале, за сотые доли секунды проламывая длинные трещины в бетоне, ломая бетонные мосты противника.
Задняя часть гидроцилиндра твердая, жесткая, имеет массу 15кг, пружинную подвеску с магнитореологическим адаптивным амортизатором. Жидкость в гидроцилиндре неупругая, с высокой скоростью звука. На низкой мощности используя биения частот, андроид может прижатой к стене рукой передавать сквозь метровую бетонную стену громкую речь (Сдавайся мясо!). Биения ультразвуковых частот точно передадут речь.
Генералы заблокировали двухместный танк Т-95 с пушкой 152мм и бортовой бронёй экипажа в пользу трехместной Арматы (оба танка весят 55т) с пушкой 125мм без бортовой противоснарядной брони (не хватает по ширине танка места для брони) экипажа, заблокировали тяжелые танки в пользу средних с 1950г чтоб не уменьшать число подчиненных – синдром Наполеона – хотят управлять сотнями тысяч человек.
Конец Великой отечественной войны – эпоха бронированных монстров типа ИС-3, «Королевский тигр» (в 1945г в Венгрии у озера Балатон «Королевские тигры» отбросили Красную Армию на 40км пока не кончились топливо, боеприпасы). Уже разрабатывали более бронированные танки ИС-4, Е-100 – не хватало высококвалифицированных танкистов, дорого обучение.
Пока идут войны с равным противником, танки растут в весе из-за невосполнимости подготовленных (дорого готовить, трудно найти способных) экипажей. В время войны генералы заинтересованы в росте защищенности (массы) танка. Защищенность (масса) танков растут до самого конца войны и 3 года после.
Генералы заблокировали одноместный вертолет Ка-50 в пользу двухместных (ликвидировали КБ Камова).
При равных условиях одноместный вертолет Ка-50 несет на тонну больше брони, вооружения. Ка-50 с автоматом сопровождения цели (+ сигнализация срыва сопровождения цели), автопилотом и виртуальным пилотом (как в Су-57) выполнит задачу лучше двухместного в условиях сильной ПВО противника: в двухместном вертолете нужно 9-20сек договориться об атаке, одноместному хватит 0,5сек.
Переход с 2-местных военных вертолетов на 1-местные уменьшит вес вертолета (с учетом брони, системы катапультирования летчика) на 1 тонну. Лучше эту 1т веса потратить на броню и более дальнобойные (тяжелые системы охлаждения) датчики, на бортсистемы ПРО и РЭБ, на лазерную систему борьбы с датчиками ракет.
За счет расположения ближе к центру масс вертолета, пушка Ка-50 точнее чем у Ка-52, Ми-28, Апач. Лобовая проекция меньше всех. Бронирование лучше всех в мире.
Надо было от 2-х совершенно разных 2-местных моделей ударных вертолетов, перейти на единый 1-местный вертолет типа Ка-50 с обработкой криптозащищенной телеметрии операторами датчиков наземной базы + операторы датчиков помогают бортсистеме радиоэлектронной борьбы с ракетами и датчиками. Телеметрию 1-местных вертолетов командование в реальном времени военным интернетом даст всем своим.
Генералов с их предательским синдромом Наполеона в Минобороны заменят инженеры, специалисты по ИИ и военный ИИ типа Скайнет. Солдат на поле боя заменят андроиды.
Самый системный класс общества – инженеры – создадут военную систему управления основанную (иерархия приоритетов, управление соотношением потерь) на выгодном соотношении потерь – проиграет войну тот у кого первым кончатся ресурсы.
Последний раз редактировалось Томас Эдисон 18 июл 2023, 19:01, всего редактировалось 2 раз(а).
Aleks писал(а): Генералов в Минобороны заменят инженеры, специалисты по ИИ.
Томас Ахметович! — то, что Вы пишите, это кромола Вы же понимаете, что эти саммые хенералы и чиновники с их синдромом Наполеона Вам не позволят это сделать.
И про военное применение роботов-андройдов Вы здесь зря пишите - проблемы у Вас могут быть очень большие по линии ФСБ. Там, в ФСБ, конечно, бестлочи сидят - физику не знают, головой думать не хотят - лентяи (по своему опыту общения с ними об этом знаю), но, если они то, что Вы здесь, Томас, пишите прочитают - ждите их в гости. Общаться с ними неприятно.
Я милитарист проектом аватара-терминатора душевно травмировал нежные души пацифистов? Только про цветочки, природу и милых котиков?
Костюм телеприсутствия – универсальный симулятор домашнего обучения летчиков, танкистов, снайперов, пулеметчиков, солдат рукопашному бою, эскаваторщиков, сварщиков, фрезеровщиков, шлифовщиков... Костюм телеприсутствия научит парашютистов управлять телом в падении: по положению рук, ног софт вычислит параметры вращения парашютиста.
Костюм телеприсутствия дает 100% всех информационных каналов оператору телеуправления наземными воздушными и подводными дронами, экскаваторами, бульдозерами, любой техникой. Оператор управляет любой техникой с виртуальных органов (пультов) управления, неотличимых в работе от реальных органов управления.
Роботами-аватарами пожарные будут тушить пожары. Андроиды-шахтеры.
Домашними детскими куклами-андроидами всех размеров через интернет будут управлять платные актрисы, актеры.
Поисковик найдет аватар-работника в радиусе до 6000км, запись работы регистратором. Аватар-работник не тратит топливо поездок на работу, с работы – расход топлива государством уменьшится в 10 раз.
ОХРАНА АВТОНОМНЫХ ТАНКЕРОВ, КОНТЕЙНЕРОВОЗОВ – напали пираты – по узконаправленным лучам спутников связи ближайшее по курсу корабля агентство охраны получит временный пароль входа на корабль. Через костюмы телеприсутствия агентство оживит андроидов-солдат.
По зашифрованному сигналу обратной связи андроиды откроют изнутри сейфы для андроидов. Андроиды перестреляют с автоматов, гранатометов всех пиратов.
Автомат сопровождения цели на экране, с передачей метки цели с точным временем кадра, обеспечит высокую точность выстрелов даже с большой задержкой сигнала. Искусственный интеллект андроида прокрутит кадры назад для покадрового распознавания и сопровождения метки на цели. После боя андроиды снова зайдут в сейфы, закроют их изнутри.
Сигнал – аватар-оператор АНДРОИДНОЙ ОХРАНЫ ЖИЛИЩ домашним андроидом прикуёт вора наручниками к трубе до приезда полиции.
Домашний костюм телеприсутствия 2 человека соберут дома за 20 минут с деталей проходящих через стандартную дверь. Все настройки под тело человека за 3 секунды делает софт. Костюм телеприсутствия для человека ростом до 1,82м: высота 2,42м. длина 2,42м. ширина 2,42м. Костюм телеприсутствия для детей ростом до 1,6м: высота 1,9м. длина 1,9м. ширина 1,9м. Конструкция костюма телеприсутствия позволяет ногами чисто делать продольный, поперечный шпагат.
ЭПИДЕМИИ Специалисты в образе андроидов будут работать в лабораториях, больницах городов (окружены армией) с смертельной эпидемией. Без костюма телеприсутствия бактериологическое оружие уничтожит государство.
МИКРОАНДРОИД-ХИРУРГ высотой 3мм изготовлен с материалов с высокой жесткостью, твердостью: сплав иридия, кубический нитрид бора, карбид бора, бор, алмаз. Хвост андроида – длинная позолоченная нить – антенна двухсторонней обратной связи и одновременно бесконтактная зарядка. ЭНЕРГОСНАБЖЕНИЕ МИКРОАНДРОИДА: 1. тонким длинным скользким кабелем идущим с копчика андроида 2. рентгеновскими лучами 3. терагерцовыми лучами 4. ультразвуком ПЕРЕМЕЩЕНИЕ МИКРОАНДРОИДА В КРОВЕНОСНЫХ СОСУДАХ: 1. микроандроида перемещает сфокусированное в перемещаемой точке несимметричное (крутой передний фронт, пологий задний фронт полупериода колебания) по графику электромагнитное поле, снабжающее энергией 2. сфокусированное несимметричное (крутой передний фронт, пологий задний фронт полупериода колебания) электромагнитное или ультразвуковое поле перемещает (снабжает энергией) микроандроида. Он саблей удалит тромб, раковую опухоль; стволовыми клетками вылечит разорванные нервные волокна сломанного позвоночника.
Человек садится в костюм телеприсутствия. Приводы зажимов зажимают руки, ноги, туловище человека.
Привод шлема по двум трубам-направляющим на голову опускает ШЛЕМ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ, фиксируя в зажимной раме туловища, чтобы убрать 2 датчика угла ориентации головы, не гнать 150кадр/сек только из-за движений головы. За полупрозрачным сферическим 3D-экраном с вырезами для плеч, невидимо человеку-1 32 телекамеры обратной связи дают человеку-2 в удаленном костюме-2 телеприсутствия 3D-картинку лица человека-1 в костюме-1 телеприсутствия.
Каждая телекамера показывает квадратный фрагмент лица, сферические искажения компенсирует софт. Границы квадратов калибруют временно включаемой прямоугольной световой сеткой на голове человека. Ячейки сетки в десятки раз меньше квадратного фрагмента.
У телекамер лампы подсветки отраженным от матового экрана рассеянным светом. Ракурсы, тип подсветки лица в шлеме, изменение цвета, яркости каждой светодиодной лампы – сценарии софта. 3D-экран с разверткой 120-180Гц, телекамеры обратной связи, лампы работают импульсно раздельно в времени не мешая друг другу.
Радиус 3D-экрана максимален ~30см: экзоскелеты рук не портят картинку. Дальше от глаз экран шлема – меньше морской болезни, тошноты от разницы «расстояние до реального объекта – до экрана».
Сферический 3D-экран по бокам сплющен на 10см чтоб выполняя работу сверху руки не задевали экран. Плотность пикселей по бокам 3D-экрана выше чем спереди.
Искажения близких объектов на картинке в экране компенсирует софт по цифрам настройки фокуса камеры.
Вариант-2: картинку в 3D-экране создают 6 лазерных проекторов с внешней или внутренней стороны экрана.
ТЕЛЕКАМЕРЫ АНДРОИДА Лицо оператора в сферическом лицевом 3D-дисплее-голове андроида. У андроида вместо поворота головы гиростабилизированное по 2 осям переключение (по горизонтали, вертикали) ракурсных телекамер, строчек их матриц. Андроиду не надо поворачивать голову с телекамерами. На разные углы обзора у андроида 6-12 телекамер. Поворот линии взгляда синтезом кадра с строк кадров основной и дополнительных телекамер.
Это избавляет от движущихся деталей систему поворота взгляда робота, делает неподвижным половину фона кадра телекамеры робота. Неподвижный фон позволяет сильнее сжать видеосигнал и трафик от андроида без потери качества картинки.
У андроида 5 фокусных диапазонов по дальности. Разнофокусные картинки соединяет софт. На каждый фокусный диапазон 2 стереокамеры для определения оператором расстояния до объекта. Длину фокуса оператор может регулировать колесиками сзади зажимной рамы туловища или стандартными движениями головы.
Для минимума трафика видеосигнала у андроида телекамеры имеют объектив большой светосилы с сверхмалой выдержкой кадра: 7кадр/сек хватит картинке медленных движений без смазывания видео. У оператора есть колесико регулировки времени выдержки кадра телекамер андроида для уменьшения трафика видеосигнала в некоторых ситуациях.
По стереокартинке андроида его правой, левой рукой могут одновременно управлять специалисты разных профессий с 2-х костюмов телеприсутствия.
Требования к разрешению стереокамер и точности датчиков вдвое ниже, если положение рук по датчикам мозг оператора стыкует с картинкой телекамер. По калиброванному датчику андроида оператор может на 3сек включить в своем экране исходный уровень освещения картинки.
СИСТЕМА ОСВЕЩЕНИЯ В ТЕМНОТЕ Вокруг лица андроида круг из светодиодов: двигая головой (сигнал датчиков положения головы) оператор управляет их выключением с одной стороны, устанавливая направление светотеней лучше передающее на 3D-экране форму объекта. Виртуальной системой управления оператор может установить режим вращающегося вокруг лица андроида светового пятна: по скорости роста светотеней оператор определяет форму объекта.
Режим «рассеянное освещение»: софт показывает картинку телекамер андроида, где от вращающегося светового пятна освещения сохранены только максимальные цифры яркости каждого пикселя, немного усилен градиент яркости. Оператор может выбрать ракурс и график усиления градиента яркости для рельефности картинки.
Режим «картинка без помех»: освещение фемтосекундными световыми импульсами с включением сверхскоростного оптического затвора телекамер только на время сверхкороткого возвращающегося отраженного светового импульса. Этот режим позволяет оператору в густом тумане, в мутной воде детально рассматривать объект в картинке телекамер, предварительно установив в метрах время возврата светового импульса.
Вариант-2: у пленоптических (матрица линз: фокусирует софт) телекамер андроида софт фокусирует сигнал на нескольких устанавливаемых оператором диапазонах глубины резкости картинки.
Для синхронизации костюмов телеприсутствия разных фирм с андроидами разных фирм: 1. в сигнале обратной связи все цифры силовой и тактильной обратной связи в процентах. 2. всемирный стандарт Базовой нулевой точки в манипуляторах (пальцев, рук, ног) с которой отсчитывают цифры угла. 3. всемирный стандарт Базовой нулевой точки для цифр силы в сигналах тактильной, силовой обратной связи. Базовая нулевая точка это часто цифра силы, которую надо превысить для получения в сигнале цифры обратной связи. 4. всемирный стандарт Базовой верхней (передней) точки максимального отклонения манипуляторов. 5. всемирный стандарт Базовой нижней (задней) точки максимального отклонения манипуляторов.
Телеуправление роботом – возможны МОРСКАЯ БОЛЕЗНЬ, тошнота, головокружение, усталость оператора от: 1. большой скорости, амплитуды угловых колебаний ракурса картинки телекамер. Решение: а)оптическая угловая стабилизация гироскопом ракурса телекамер робота б)софт заменяет равномерную угловую скорость мгновенными скачками угла линии взгляда телекамер. Неподвижный фон, отсутствие угловой скорости улучшат самочувствие оператора 2. несоответствия расстояния «глаз – объект в реале» расстоянию «глаз – экран шлема». Решение: экран в шлеме подальше от глаз оператора.
ИНТЕРНЕТ-ТРАФИК КОСТЮМА ТЕЛЕПРИСУТСТВИЯ: 1. общий трафик силовых, угловых каналов костюма телеприсутствия 56 кбит/с (7 Кб/с): Каналы углов, угловых скоростей: 34 кбит/с: 12 бит на угол, 5 бит на угловую скорость с периодом дискретизации 0,02с. Углы 40 тросов по сигналам датчиков перемещения троса: 24 кбит/с на углы + 10 кбит/с на угловые скорости. Удлинение тросов под нагрузкой компенсируем таблицами решений. Больше угловая скорость экзоскелетов рук, ног – больше частота передачи угла Каналы силы, скорости роста силы: 22 кбит/с: 6 бит на силу, 5 бит на скорость роста силы с периодом дискретизации 0,02с. Это в 40 тросах 12 кбит/с на силы + 10 кбит/с на скорости роста силы в 40 тросах Канал гироскопа: 1,95 кбит/с: в среднем 7 бит на угол с периодом дискретизации 0,02с. Это 1,05 кбит/с на три угла кардана. 6 бит на угловую скорость с периодом дискретизации 0,02с. Это 0,9 кбит/с на 3 угловые скорости кардана. Канал ускорений туловища по 9 каналам активной 3D-подвески: 2,3 кбит/с: 5 бит на канал датчика с периодом дискретизации 0,02с
2.Канал видео, сжатая 3D-картинка, 3D-звук: 1 Мб/с 3.Канал тактильный, обе кисти: 2,7 Мбит/с (43 Кб/с). Для работы андроида достаточно 2304 пикселя на 8 кончиков пальцев обоих кистей андроида, 3 бит на пиксель с периодом дискретизации 0,02с. На кончике пальца андроида тактильная матрица 48 х 48.
На теле человека 1млн тактильных пикселей. Тактильное разрешение пальца руки 1мм, кончика пальца 0,7мм. Порог чувствительности указательного пальца 0,2 г/мм2.
В динамических (несжимаемых) сценах АЛГОРИТМ «РАЗРЕШЕНИЕ ЭКРАНА – ЧАСТОТА КАДРОВ» при нехватке интернет-трафика подгонит видеобаланс «РАЗРЕШЕНИЕ ЭКРАНА – ЧАСТОТА КАДРОВ» к трафику: при превышении критической пиксельной скорости перемещения в картинке линий, алгоритм увеличит частоту кадров, уменьшив разрешение. При уменьшении пиксельной скорости движения линий в картинке, алгоритм увеличит разрешение картинки, уменьшит частоту кадров.
Видеобалансом, стереобазой и буферизацией оператор управляет в виртуальной системе управления.
ЭКОНОМИЯ ТРАФИКА Телекамеры большой светосилы, малые выдержка и битность (алгоритмы) кадра. Рука андроида подняла предмет – с трафика можно временно убрать канал силы кисти – алгоритмом стабилизации сил пальцев до появления боковой силы или больше 2% изменения вертикальной силы.
Приоритетный список тактильных участков: экономим трафик – отключим участки с большим номером, затем номера поменьше. Сжатый трафик костюма телеприсутствия 1-8 Мб/с: увеличен период дискретизации медленно меняющихся цифр, вместо расшифровки имён каналов в начале серии каналов указаны номера периода дискретизации, варианта вырезки каналов с не меняющимися цифрами.
Для костюмов телеприсутствия и виртуальной реальности сотовые сети 5G выделят сегменты минимальной задержки сигнала. Костюм телеприсутствия работает на 1-10 Мб/с в мобильном интернете с движущегося автомобиля.
КОСТЮМ ТЕЛЕПРИСУТСТВИЯ ИЗМЕНИТ ПРОТОКОЛ ИНТЕРНЕТА: 1. интернет разделят на сегменты малой, средней, большой (буферизация) двухсторонней задержки управления 2. введут функцию изменения длины пакета интернет-информации. Короткие пакеты – минимум задержки, длинные – минимум трафика 3. бессерверная обратная связь при ускорении движений укорачивает пакеты интернет-информации, уменьшает число каналов
Последний раз редактировалось Томас Эдисон 18 июл 2023, 19:04, всего редактировалось 2 раз(а).



 Будь ваша программа в 1000 раз лучше, но без оформления (интерфейса) ей будет трудно найти выход на рынок.
Будь ваша программа в 1000 раз лучше, но без оформления (интерфейса) ей будет трудно найти выход на рынок. )
)