https://rg.ru/video/2023/01/27/v-rossii ... vatar.html
However some like alredy was in 60-th years:

Технический форум по робототехнике.

 Вы исчезли из социальной сети „Вконтакте“ - подозреваю, что Вас забанили за Ваши слишком резкие высказывания. А ведь я Вас предупреждал о том, что так может случиться в наше неспокойное время - могли ведь и посадить - Вы ещё легко отделались! Призываю Вас, Томас Ахметович, здесь на форуме воздерживаться от резких высказываний и слишком откровенных суждений. А то ведь Вас и отсюда могут „попросить на выход” - тогда Вы лишитесь этой трибуны.
Вы исчезли из социальной сети „Вконтакте“ - подозреваю, что Вас забанили за Ваши слишком резкие высказывания. А ведь я Вас предупреждал о том, что так может случиться в наше неспокойное время - могли ведь и посадить - Вы ещё легко отделались! Призываю Вас, Томас Ахметович, здесь на форуме воздерживаться от резких высказываний и слишком откровенных суждений. А то ведь Вас и отсюда могут „попросить на выход” - тогда Вы лишитесь этой трибуны. 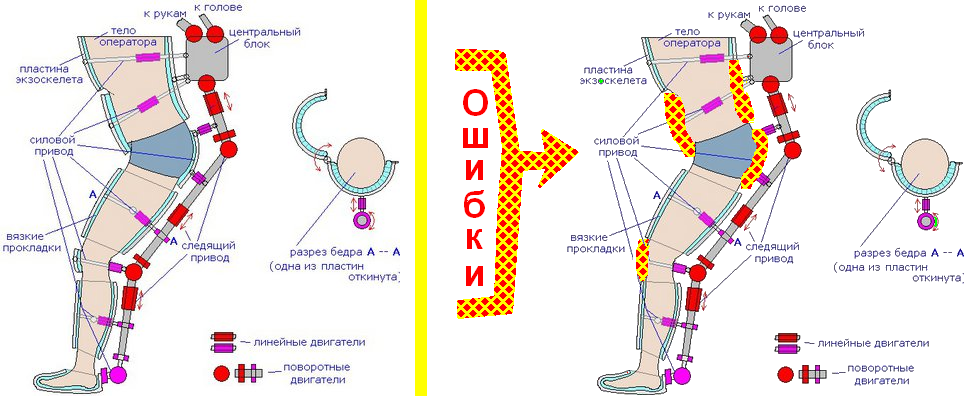 - В России вообще „слишком умных” - начальство не любит - как, там в одной песенке поётся: „С умным - хлопотно, с дураком - плохо, нужно что-то среднее”… Вот из-за этого „хлопотно” и возникают везде проблемы
- В России вообще „слишком умных” - начальство не любит - как, там в одной песенке поётся: „С умным - хлопотно, с дураком - плохо, нужно что-то среднее”… Вот из-за этого „хлопотно” и возникают везде проблемы  Она ещё со времен царей :
Она ещё со времен царей : Поэтому делиться этой информацией „за просто так“ я не буду.
Поэтому делиться этой информацией „за просто так“ я не буду. Но как я уже сказал: анализировать эту проблему я здесь не буду - не хочу проболтаться. — просто указал, где на мой взгляд, у Ватки ошибки.
Но как я уже сказал: анализировать эту проблему я здесь не буду - не хочу проболтаться. — просто указал, где на мой взгляд, у Ватки ошибки.
 ???? в данном случае Ваша мысль мне не понятна, поэтому ни согласиться с Вами, ни возразить не могу.
???? в данном случае Ваша мысль мне не понятна, поэтому ни согласиться с Вами, ни возразить не могу. Томас Эдисон писал(а):По вашим словам видно – вы ничего не знаете по методы работы идеологических силовиков. Я принципиально не веду разговоры про темы, которые мало знаю или плохо понимаю, чтоб не позориться. Полагаю этот принцип уместен и для вас.
Чинуши это силовики. Государство – аппарат насилия в лице класса силовиков.
. Да, именно по той причине, что большая (по сравнению с воздухом) вязкость воды позволит легче обеспечить двуногое вертикальное перемещение робота под водой (позволит легче сохранять вертикальную устойчивость ). Хотя на длинные дистанции робота целесообразней перемещать водомётными движителями, но на маленькие расстояния робота можно перемещать обычным образом — сделать обычный шаг. Ну, а антропоморфная форма робота обеспечивает УДОБНЫЙ (ПРИВЫЧНЫЙ) ИНТЕРФЕЙС управления… Короче: технология подводного антропоморфного робота-аватара позволит полностью заменить жесткие водолазные скафандры. Позволит сделать работу водолазов абсолютно безопасной и позволит погружаться на любые глубины. Именно по этим причинам я первоначально выбрал подводный вариант — он гарантирует результат. . ), но в этой области ещё очень-очень-очень много работы, которой хватит на всех
), но в этой области ещё очень-очень-очень много работы, которой хватит на всех  . (Легковые автомобили — рама, двигатель, руль, колеса, сидение, например, уже лет 100 назад изобрели, а инженеры до сих пор доводят конструкцию до совершенства — чего туда только не впихивают: магнитолы, АБС, климат-контроль, ремни, подушки безопасности, и пр. пр. пр.) Так же будет и с костюмом — работай, совершенствую — поле для творчества обширное. По Вашим словам и у Вас, Томас Ахметович, в этой области есть наработки. Они могут скоро понадобиться — об этом ниже.
. (Легковые автомобили — рама, двигатель, руль, колеса, сидение, например, уже лет 100 назад изобрели, а инженеры до сих пор доводят конструкцию до совершенства — чего туда только не впихивают: магнитолы, АБС, климат-контроль, ремни, подушки безопасности, и пр. пр. пр.) Так же будет и с костюмом — работай, совершенствую — поле для творчества обширное. По Вашим словам и у Вас, Томас Ахметович, в этой области есть наработки. Они могут скоро понадобиться — об этом ниже. Томас Эдисон писал(а):Поздравляю вас Александр – вы наполовину миллиардер! Как насчет того, чтобы обмыть в ресторане получение госзаказа на $0,5млрд на разработку костюма телеприсутствия?
 )
)