Я почитал Ваши комментарии - как всегда очень остроумно!

Оценил!
Но только давайте все же "включим мозги".
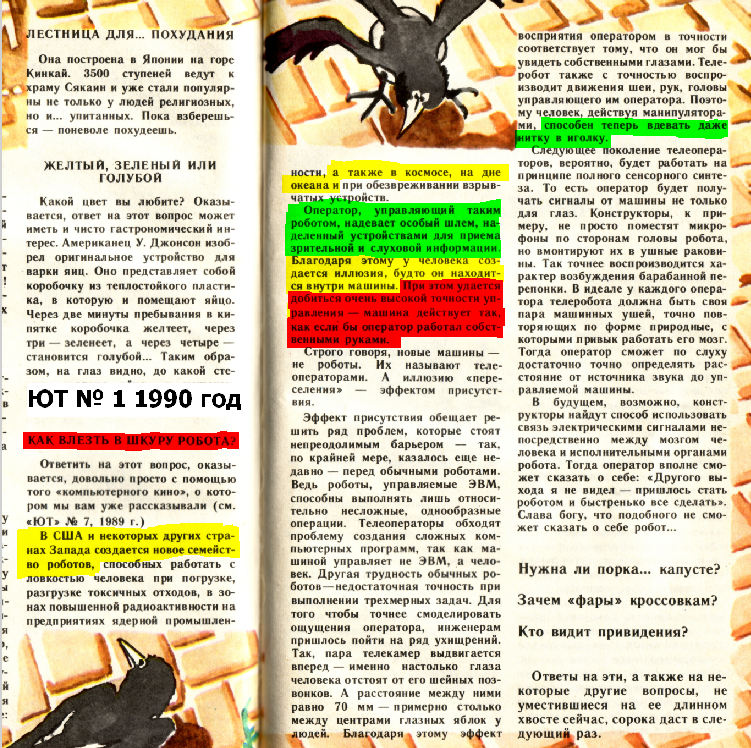
Копирующие манипуляторы для рук известны давно ещё со середины 60 годов прошлого века. Вот, например, вырезка из журнала "Наука и жизнь" за
1973 год:
 Читайте внимательно:
Читайте внимательно: "пальцы железных рук настолько чувствительны, что могут продеть нитку в ушко иглы" - вероятно подобными манипуляторами достаточно удобно управлять.
Таким образом, для рук у нас копирующие манипуляторы есть.
Не составит большого труда сделать нечто подобное и для ног - управляющие штаны для движения ногами робота (принцип управления ногами робота будет тот же что и руками - копирующий)
Теперь для обеспечения управления антропоморфным роботом остаётся решить только одну задачу – найти способ придавать телу человека-оператора в пространстве туже угловую ориентацию относительно гравитационного поля Земли как и у корпуса робота.
И тогда мы сможем дистанционно управлять антропоморфным роботом в копирующем режиме в том числе возможно и вертикальной двуногой ходьбой. Так ведь?
У кого-нибудь из участников форума есть возражения против приведенных здесь логических размышлений?
Вот моё изобретение как раз и решает проблему придания телу человека-оператора в пространстве такой же угловую ориентацию относительно гравитационного поля Земли как и у корпуса робота. Т.е. моё изобретение завершает процесс решения проблемы создания дистанционно-управляемого антропоморфного робота, управляемого в копирующем режиме.
Про то что на голову человеку-оператору, управляющему роботом необходимо водрузить специальный шлем с мониторами, как в этом видеоролике:
http://aleksstreltsov9.narod.ru/VR.wmv я подробно писать не буду – думаю, участники форума об этом сами догадаются (скажу только, что т.н. виртуальная сфера братьев Латыповых, показанная в этом видеоролике, непригодна для дистанционного управления копирующим антропоморфным роботом).
Надеюсь, что и теперь ни у кого на форуме не возникло возражений и против этих моих логических размышлений?
Т.е. полагаю, что Вы все согласились со мной в том, что дистанционно-управляемого антропоморфного робота, управляемого в копирующем режиме создать можно. Принципиальных запретов на это нет. Ведь так? Или у кого-нибудь есть возражения?
Остаётся решить вопрос: где такие роботы могут найти применение.
Ответ при проведении различного рода аварийных работ в опасной для человека среде. Здесь чтобы не писать много по этому вопросу приведу ссылку на сайт Московского Государственного Технического Университета – там это хорошо и кратко изложено:
http://aleksstreltsov14.narod.ru/MGTU.htmЯ же изначально рассматривал возможность применения антропоморфных роботов для подводных (водолазных) работ.
Объясняю участникам форума суть проблемы.
Человек, напяливший на себя резиновый гидрокомбинезон, может погрузиться при соблюдении определенных режимов (я не буду вдаваться во все подробности) примерно до 600 метров Глубже не позволяет биология человеческого организма.
Подводные дистанционно-управляемые роботы могут работать на существенно больших глубинах. При этом эти роботы имеют не антропоморфное строение:

Однако, ПРОШУ УЧАСТНИКОВ ФОРУМА ОБРАТИТЬ НА ЭТО ОСОБОЕ ВНИМАНИЕ, наряду с подводными роботами на практике используются и жесткие водолазные скафандры – антропоморфная конструкция.

Казалось бы зачем? Если по Вашим словам, господа критики, можно обойтись и не антропоморфными роботами. А вот как раз из-за удобства управления антропоморфные жесткие водолазные скафандры и применяются:
http://aleksstreltsov9.narod.ru/Kamtchatka.wmv (при том что глубина, на которой можно работать в жестком водолазном скафандре исчерпывается 610 метрами)
А моё изобретение позволяет «скрестить» достоинства роботов (неограниченная глубина погружения) и антропоморфных жестких водолазных скафандров (максимальное удобство управления). И благодаря этому решить проблему проведения водолазных работ на любых глубинах.
Ну и где здесь неадекватность? И кто после этого из нас «тролль»?