Ответ для Сергея:
А в чем конкретно проявляется мое "троленье"? (если, конечно, так можно выразиться) Обоснуйте, пожалуйста, свою мысль.
Ну да, у меня есть изобретение, я считаю, что оно будет полезно обществу. В частности сделает абсолютно не нужным закупку за рубежом дорогостоящих жестких водолазных скафандров и не менее дорогих деталей к ним. А также сделает ненужным организацию производства запасных деталей к жестким водолазным скафандрам в нашей стране, мне известно, что такие попытки предпринимаются. (На мой взгляд, жесткие водолазные скафандры – это уже вчерашний день. Ведь рано или поздно системы дистанционного управления антропоморфными роботами пробьют себе дорогу в жизнь. И тогда жесткие водолазные скафандры можно будет отправить в музей)
Так в чем, уважаемый Сергей, состоит моё "троленье". Я думаю, что
на форуме собрались специалисты в области робототехники, или те, кто себя таковыми считают, и полагаю, что им будет что обсудить - при необходимости они могут высказать свои замечания. Поэтому надеюсь на конструктивный диалог и помощь.
Ответ для dccharacter
К большому сожалению, Ваше предложение по использованию этой технологии для освоения космического пространства не может быть осуществлено. Вы просто не успеете это предложение реализовать – мне известно, что и в США и в Европе уже давно работают над такими проектами и достигли определенных успехов. Вот ссылки на соответствующие видео: США :
http://deepdivertech.narod.ru/Robonaut.wmv Германия:
http://aleksstreltsov.narod.ru/justin.wmv Известно мне, что над этой проблемой создания дистанционно-управляемого антропоморфного робота работают и в других странах. Однако пока все эти дистанционно управляемые роботы передвигаются на колёсиках или гусеницах. Американцы планируют своему робонавту приделать ноги, во всяком случае на картинке, опубликованной в «Комсомольской правде» есть изображение робонавта с ногами:
http://aleksstreltsov14.narod.ru/Guest1.png (но ниже приписано: Две ноги в разработке) Пока же, как я уже сказал, эти полуантропоморфные дистанционно-управляемые роботы передвигаются на колесах или гусеницах. Кроме того, освоение ДАЛЬНЕГО космоса с помощью дистанционно-управляемых роботов весьма проблематично из-за большого запаздывания управляющих сигналов. (Американцы своего дистанционно-управляемого робонавта, например, планируют использовать непосредственно возле станции в пределах прямой видимости – типа астронавт сидит внутри космического корабля и дистанционно управляет роботом, работающим снаружи в космосе. Такое реально, запаздывание сигнала несколько микросекунд. А вот если мы попытаемся управлять с Земли роботом, находящимся на Марсе, то у нас радиосигнал будет запаздывать на несколько минут и тогда дистанционное управление в копирующем режиме станет невозможным.) Так что подобный дистанционно-управляемый антропоморфный робот может эффективно использоваться только на расстоянии в несколько десятков километров. Для проведения каких-нибудь аварийных или подводных работ этого вполне достаточно. Ну вот, как-то так.
И хочу поблагодарить Вас, Андрей, за то, что проголосовали за меня. Ответ для Мур (скрытого хозяина вселенной):
В моей работе (смотрите описание изобретения) предлагается способ герметизации робота, так что снимать с себя резиновый костюм и напяливать его на робота не придётся

)
А вот на суше его гонять за пивом не следует. Во-первых, управлять ходьбой робота в данном случае придется самому, т.е., образно говоря, придётся «самому бить ноги». Так что «овчинка выделки не стоит», ну, если только на улице сильный дождь с градом, то можно в магазин за пивом и колбасой, действительно отправить робота. А так накладно получится. Кроме того, глубокоуважаемый Фёдор Анатольевич, я не могу быть полностью уверен в том, что способ, предложенный мной, позволит управлять сухопутным роботом (и честно говорю об этом). Дело в том, что наши шаги при ходьбе не остаются постоянными по длине, они чуть-чуть различаются от шага к шагу – у нас в голове есть два таких датчика (отолитовые органы), которые измеряют линейные ускорения нашего тела. Поэтому когда мы ходим или бегаем, наши шаги на самом деле отличаются по длине что бы не упасть, всё это делается нашим мозгом на подсознательном уровне – мы просто этого не замечаем. А вот в механизме управления, который разрабатывал я, воспроизвести линейные ускорения не получится, и следовательно, человек-оператор, дистанционно управляющий роботом не сможет получить информацию о том, что надо изменить длину шага. Т.е. робот может оказаться на суше неустойчивым. Поэтому я не могу давать гарантий, что данный способ управления можно использовать для сухопутных роботов. Зато под водой, где плотность среды 760 раз большие и соответственно вязкость тоже, можно гарантировать успех – в толще воды робот будет перемещаться с помощью водомётов и только уже непосредственно на месте работы использовать ноги. Сильных линейных ускорений при этом в вязкой среде не будет. Именно поэтому с самого начала я и разрабатывал робота-водолаза. Для подводных роботов можно давать 100% гарантии. Ну а потом, может быть, удастся использовать и для сухопутных.
 Ну, как, удобно? Уверен, что не очень! – Вы уже привыкли работать мышью. Нужно, например, переместить указатель мыши в правый верхний угол и Вы его перемещаете, двигая мышь по коврику от себя по диагонали вверх и вправо. Нужно переместить курсор мыши влево – двигаете мышь налево… Вам удобно, причем удобно на подсознательном уровне – Вы уже не задумываетесь куда, что двигать. Также и в случае с копирующим роботом - Вы просто одели на себя костюмчик (Вам не надо обучаться специально или обучение будет самым минимальным) и Вы сразу же можете управлять роботом - Вы просто чисто интуитивно делаете в пустом пространстве обычные привычные для Вас движения, которые Вы бы делали, будучи на месте работы в водолазном костюме. И Вам не приходится задумываться какую кнопку всякий раз нажать, какой джойстик куда вертеть. Как я уже сказал - обучение оператора, управляющего роботом, - минимально. Это то, что называется «Хороший интерфейс».
Ну, как, удобно? Уверен, что не очень! – Вы уже привыкли работать мышью. Нужно, например, переместить указатель мыши в правый верхний угол и Вы его перемещаете, двигая мышь по коврику от себя по диагонали вверх и вправо. Нужно переместить курсор мыши влево – двигаете мышь налево… Вам удобно, причем удобно на подсознательном уровне – Вы уже не задумываетесь куда, что двигать. Также и в случае с копирующим роботом - Вы просто одели на себя костюмчик (Вам не надо обучаться специально или обучение будет самым минимальным) и Вы сразу же можете управлять роботом - Вы просто чисто интуитивно делаете в пустом пространстве обычные привычные для Вас движения, которые Вы бы делали, будучи на месте работы в водолазном костюме. И Вам не приходится задумываться какую кнопку всякий раз нажать, какой джойстик куда вертеть. Как я уже сказал - обучение оператора, управляющего роботом, - минимально. Это то, что называется «Хороший интерфейс». 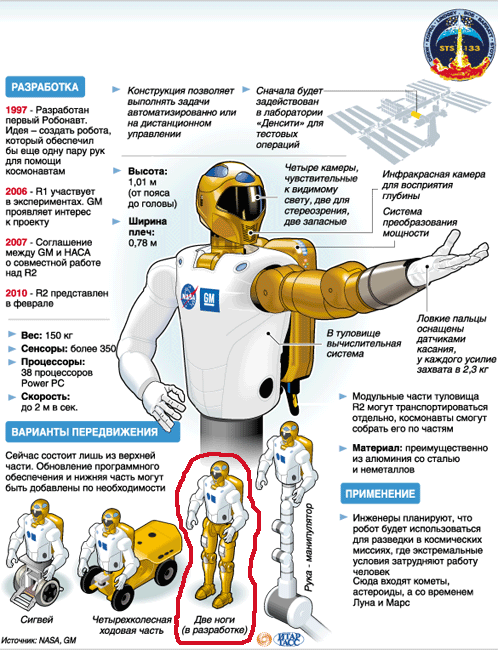{kind=link}