есть еще море контроллеров. stm8, mcp и еще не несколько других 8мибитников, сотни(не меньше!) вариантов ARMов, куча всякой экзотики, SoC системы (типа роутеров, Raspberry PI и подобных).
Традиции предписывают 8бит авр и ардуины, стремление к совершенству - 32 бит армы.
Выбор между готовыми модулями и рассыпухой - дело личных пристрастий. Лично я начинал(да так и продолжаю) работать с платами discovery фирмы st. Считаю, лучше начинать с готовых плат, чтобы собирать не все грабли сразу, а все-таки по очереди.
roboforum.ru
Технический форум по робототехнике.
Как собрать робота с нуля? (Читать всем!)
Re: Как собрать робота с нуля? (Читать всем!)
Как кто то сказал на этом форуме, выбирать надо то что использует знакомый, и сможет если что помочь... (или это было о дистрибутиве линукса..?)
А если нет знакомого то что использовалось в готовых решениях, где пошагово разжевано что к чему и почему. т.е. о чем документация доступна и вменяема.
А если нет знакомого то что использовалось в готовых решениях, где пошагово разжевано что к чему и почему. т.е. о чем документация доступна и вменяема.
Re: Как собрать робота с нуля? (Читать всем!)
Дело вкуса. Я готов разбираться и без знакомых.
Но если хочется поддержки социума - тогда AVR(для простых поделок) или арм какой-нибудь, типа NXP или STM32 - для более заковыристых.
Но если хочется поддержки социума - тогда AVR(для простых поделок) или арм какой-нибудь, типа NXP или STM32 - для более заковыристых.
 Re: Как собрать робота с нуля? (Читать всем!)
Re: Как собрать робота с нуля? (Читать всем!)
Приветствую! Помогите решить вопрос с платформой! Хочу сделать автономного робота. Чтобы он смог распознавать человека через камеру и ехал к нему. Не знаю что использовать, ардуино или расберри. Тут ещё есть возможность использовать TP-LINK TL-MR3020 сразу =)
Re: Как собрать робота с нуля? (Читать всем!)
Хочу собрать простого робота на платформе arduino. Роботов не разу не собирал. Сам работаю программистом и заинтересовала такая возможность. Хочу чтобы робот выполнял следующие задачи:
1. Ездил
2. Можно было управлять дистанционно с помощью bluetooth
3. Робот самостоятельно объезжал препятствия
4. Простая сборка и разборка, читал про Prototyping Board
Какое комплектующее мне нужно приобрести? Если можно, то указывайте комплектующее со ссылками, пожалуйста. Заранее благодарю за помощь.
1. Ездил
2. Можно было управлять дистанционно с помощью bluetooth
3. Робот самостоятельно объезжал препятствия
4. Простая сборка и разборка, читал про Prototyping Board
Какое комплектующее мне нужно приобрести? Если можно, то указывайте комплектующее со ссылками, пожалуйста. Заранее благодарю за помощь.
Re: Как собрать робота с нуля? (Читать всем!)
народ требует конкретики !
1. на колёсах, на гусеницах? какие габариты и грузоподъёмность? хочется самому делать при помощи ножовки/клея/проволоки или купить готовое?
в любом случае кроме собственно самого механического шасси, потребуются подходящие платы управления и аккумуляторы.
2. блютус скучно и просто вайфай прикольней но сложней. для блютуса нужна будет плата собственно блютуса и какойнибуть микроконтроллер на платке типа ардуины, компьютерный USB свисток не годится. для вайфая понадобится какойнибуть роутер и простенький контроллер типа ардуины.
вайфай прикольней но сложней. для блютуса нужна будет плата собственно блютуса и какойнибуть микроконтроллер на платке типа ардуины, компьютерный USB свисток не годится. для вайфая понадобится какойнибуть роутер и простенький контроллер типа ардуины.
3. значит нужны сенсоры. ультразвуковые? инфракрасные? контактные датчики? или может сразу компьютерное зрение + кинект?
4. простая сборка и разборка это у готовых конструкторов в коробке. если покупать вразнобой то без жёлудей и спичек не обойтись, протобоард это для того чтобы разные радиодетали не паять в плату, а по быстрому повтыкать и проверить что работает. в твоём случае навряд ли понадобится.
программист чего? если знаком с линуксом то может быть будет интересно сделать на базе роутера, wiki/OR-WRT
если хочется более низкого программирования то плату на базе AVR или STM.
1. на колёсах, на гусеницах? какие габариты и грузоподъёмность? хочется самому делать при помощи ножовки/клея/проволоки или купить готовое?
в любом случае кроме собственно самого механического шасси, потребуются подходящие платы управления и аккумуляторы.
2. блютус скучно и просто
вайфай прикольней но сложней. для блютуса нужна будет плата собственно блютуса и какойнибуть микроконтроллер на платке типа ардуины, компьютерный USB свисток не годится. для вайфая понадобится какойнибуть роутер и простенький контроллер типа ардуины.3. значит нужны сенсоры. ультразвуковые? инфракрасные? контактные датчики? или может сразу компьютерное зрение + кинект?
4. простая сборка и разборка это у готовых конструкторов в коробке. если покупать вразнобой то без жёлудей и спичек не обойтись, протобоард это для того чтобы разные радиодетали не паять в плату, а по быстрому повтыкать и проверить что работает. в твоём случае навряд ли понадобится.
программист чего? если знаком с линуксом то может быть будет интересно сделать на базе роутера, wiki/OR-WRT
если хочется более низкого программирования то плату на базе AVR или STM.
Re: Как собрать робота с нуля? (Читать всем!)
Myp, мне из блюпупов характеристики nrf51822 очень понравились.
Re: Как собрать робота с нуля? (Читать всем!)
Добрый день! Купил такого робота на базе серводвигателей ld-2015 и такого контроллера
http://i.ebayimg.com/00/s/NjEyWDgwMA==/ ... IkE9qU3kIs)BRhOsHDuk!~~60_3.JPG
https://www.dropbox.com/s/jolmn87bes279 ... 220040.jpg и
https://www.dropbox.com/s/3te4gyrv9jasl ... 220024.jpg .
Но в процессе сборки (подключил аккумулятор на 7,4 v, подключил по USB к компу, установил дрова, воткнул сервы) столкнулся с тем, что при попытке запуска цикла действий на три/четыре сервы сразу, на плате сгорели несколько предохранителей. А при новой проверке каждого серва по отдельности выявились два серводвигателя, которые не работали и начинали греть предохранители, а на самой плате перестала работать половина контактов для серво (напряжение на них есть: на питающих пинах 7,4 v, на сигнальном 2,5 v, но при подключении Сервы - она ноль эмоций). На работающих контактах для Серво - на сигнальном пине напряжение 0,3-0,4 v (немного скачет если двигать ползунок в программе).
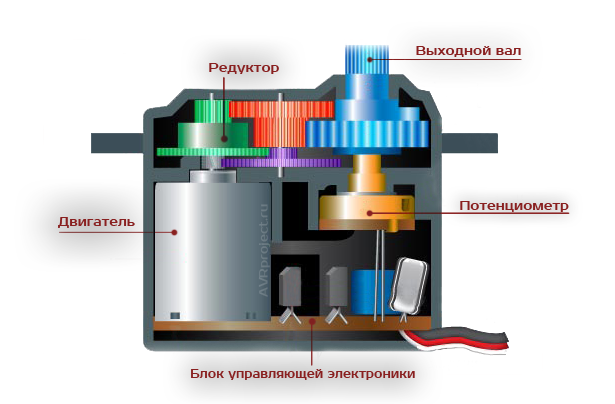
Как выяснить источник проблемы? Если дело в Сервах, то как можно выяснить, что могло с ними произойти (внутренности один в один как на картинке http://avrproject.ru/servo/servo_construction.png) - они стали очень туго ходить (по сравнению с другими) и при попытке запустить при помощи контроллера - выбивает предохранитель на плате контроллера. Подача на моторчик 7,4 вольт напрямую ничего не дала - напружно гудит, дрожит и все. На плате Сервы явных признаков неисправности - нет.
То же самое с контроллером - кроме сгоревших предохранителей и половины неработающих пинов - явных признаков поломки нет. =) Могу заменить предохранители, но опасаюсь, что проблему это не решит, да и просто раздражает непонимание причин происходящего. Куда копать?
http://i.ebayimg.com/00/s/NjEyWDgwMA==/ ... IkE9qU3kIs)BRhOsHDuk!~~60_3.JPG
https://www.dropbox.com/s/jolmn87bes279 ... 220040.jpg и
{kind=link}
https://www.dropbox.com/s/3te4gyrv9jasl ... 220024.jpg .
{kind=link}
Но в процессе сборки (подключил аккумулятор на 7,4 v, подключил по USB к компу, установил дрова, воткнул сервы) столкнулся с тем, что при попытке запуска цикла действий на три/четыре сервы сразу, на плате сгорели несколько предохранителей. А при новой проверке каждого серва по отдельности выявились два серводвигателя, которые не работали и начинали греть предохранители, а на самой плате перестала работать половина контактов для серво (напряжение на них есть: на питающих пинах 7,4 v, на сигнальном 2,5 v, но при подключении Сервы - она ноль эмоций). На работающих контактах для Серво - на сигнальном пине напряжение 0,3-0,4 v (немного скачет если двигать ползунок в программе).
Как выяснить источник проблемы? Если дело в Сервах, то как можно выяснить, что могло с ними произойти (внутренности один в один как на картинке http://avrproject.ru/servo/servo_construction.png) - они стали очень туго ходить (по сравнению с другими) и при попытке запустить при помощи контроллера - выбивает предохранитель на плате контроллера. Подача на моторчик 7,4 вольт напрямую ничего не дала - напружно гудит, дрожит и все. На плате Сервы явных признаков неисправности - нет.
{kind=link}
То же самое с контроллером - кроме сгоревших предохранителей и половины неработающих пинов - явных признаков поломки нет. =) Могу заменить предохранители, но опасаюсь, что проблему это не решит, да и просто раздражает непонимание причин происходящего. Куда копать?
Re: Как собрать робота с нуля? (Читать всем!)
большое руководство для нас, спасибо за те советы.
Re: Как собрать робота с нуля? (Читать всем!)
Здравствуйте!
Хочу начать изучение роботов вместе с ребенком 9 лет. Интересует как работа с ними, так и постройка с нуля. Собственно, вопрос в следующем: есть ли где-нибудь описание простейших роботов-манипуляторов, чтобы можно было использовать пару-тройку датчиков, движок или серву. Тип контроллера не важен. На начальном этапе это будет ардуйня.
Хочется сделать нечто, с помощью чего можно заинтересовать ребенка роботами и контроллерами и что не потребует много сил для разработки и изменения.
Спасибо
Хочу начать изучение роботов вместе с ребенком 9 лет. Интересует как работа с ними, так и постройка с нуля. Собственно, вопрос в следующем: есть ли где-нибудь описание простейших роботов-манипуляторов, чтобы можно было использовать пару-тройку датчиков, движок или серву. Тип контроллера не важен. На начальном этапе это будет ардуйня.
Хочется сделать нечто, с помощью чего можно заинтересовать ребенка роботами и контроллерами и что не потребует много сил для разработки и изменения.
Спасибо
Re: Как собрать робота с нуля? (Читать всем!)
На всякий случай хочу уточнить посыл из предыдущего сообщения. Ребенок - девочка. Ее одноклассник ходит на кружок, где они занимаются с Lego Mindstorm NXT. Малышке тоже хочется делать роботов, но на кружок этот ходить по некоторым причинам не может.
Под роботом я имею в виде не только самодвижущуюся тележку, но и простейший автомат, который в ответ на какое-нибудь событие производит некоторое действие. К примеру, сторожевой автомат, у которого в качестве датчика выступает УЗ-дальномер, в качестве исполнительного механизма - светодиод или буззер. Алгоритм прост - при приближении обхекта на некотором расстоянии от датчика срабатывает светодиод и/или буззер. При удалении - они отключаются. В общем, вопрос остется прежним: есть ли где-нибудь ресурс, посвященный такого рода самоделкам, которые при минимуме деталей и навыков в построении механизмов смогут показать хоть маленькую, но мощь роботостроения. Я хотел бы начать с простейшего, после чего можно было бы задачи усложнять по мере увеличения навыков как у меня, так и у ребенка. Возможно, кто-то из форумчан имеет опыт постройки такого рода механических автоматов и сможет привести пару тройку самых простых, которые можно было бы повторить в домашних условиях.
В наличии есть механический конструктор, который можно было бы использовать в качестве базы для автомата, плюс пяток Arduino Mini Pro, пяток серв, УЗ-дальномеры, релюшки и еще немного всякого хлама, который можно подключить к контроллеру. А еще много желания и прямые руки, дружащие и с паяльником, и с молотком, и со сварочным аппаратом. В общем, буду рад любому пинку в нужном направлении. Большое всем спасибо.
Под роботом я имею в виде не только самодвижущуюся тележку, но и простейший автомат, который в ответ на какое-нибудь событие производит некоторое действие. К примеру, сторожевой автомат, у которого в качестве датчика выступает УЗ-дальномер, в качестве исполнительного механизма - светодиод или буззер. Алгоритм прост - при приближении обхекта на некотором расстоянии от датчика срабатывает светодиод и/или буззер. При удалении - они отключаются. В общем, вопрос остется прежним: есть ли где-нибудь ресурс, посвященный такого рода самоделкам, которые при минимуме деталей и навыков в построении механизмов смогут показать хоть маленькую, но мощь роботостроения. Я хотел бы начать с простейшего, после чего можно было бы задачи усложнять по мере увеличения навыков как у меня, так и у ребенка. Возможно, кто-то из форумчан имеет опыт постройки такого рода механических автоматов и сможет привести пару тройку самых простых, которые можно было бы повторить в домашних условиях.
В наличии есть механический конструктор, который можно было бы использовать в качестве базы для автомата, плюс пяток Arduino Mini Pro, пяток серв, УЗ-дальномеры, релюшки и еще немного всякого хлама, который можно подключить к контроллеру. А еще много желания и прямые руки, дружащие и с паяльником, и с молотком, и со сварочным аппаратом. В общем, буду рад любому пинку в нужном направлении. Большое всем спасибо.
Re: Как собрать робота с нуля? (Читать всем!)
Для начала - смешная и оч простая штука: загуглите Most Useless Machine
Добавлено спустя 5 минут 52 секунды:
Потом можно полистать тут, вдруг чего приглянется и адаптировать под не-лего:
http://www.nxtprograms.com/projects.html
Можно посмотреть на BEAM роботов
Добавлено спустя 5 минут 52 секунды:
Потом можно полистать тут, вдруг чего приглянется и адаптировать под не-лего:
http://www.nxtprograms.com/projects.html
Можно посмотреть на BEAM роботов
Re: Как собрать робота с нуля? (Читать всем!)
Загорелся идеей освоить азы робототехники. Ни разу этим не занимался, но хочу начать.
В связи с этим прошу вашего совета.
Есть цель, собрать робота-вездехода на ДУ. За основу планирую взять ардуино. Понимаю, что я собрать такого робота сразу не смогу, поэтому хочу разбить свой проект на несколько пунктов:
1. Собрать платформу/шасси и научить её поворачивать.
2. Поставить датчики и научить робота обходить препятствия.
3. Установить ДУ.
Что необходимо для сборки? Какой инструмент? Какие детали и платы? Желательно детально всё описать.
Буду рад адекватной критике и дельным советам. Очень надеюсь на вашу помощь.
В связи с этим прошу вашего совета.
Есть цель, собрать робота-вездехода на ДУ. За основу планирую взять ардуино. Понимаю, что я собрать такого робота сразу не смогу, поэтому хочу разбить свой проект на несколько пунктов:
1. Собрать платформу/шасси и научить её поворачивать.
2. Поставить датчики и научить робота обходить препятствия.
3. Установить ДУ.
Что необходимо для сборки? Какой инструмент? Какие детали и платы? Желательно детально всё описать.
Буду рад адекватной критике и дельным советам. Очень надеюсь на вашу помощь.
Re: Как собрать робота с нуля? (Читать всем!)
самый главный совет это чётко описать хотелки.
вес устройства, количество колёс/моторов, размеры всего и вся.
желаемые параметры типа скорости, грузоподъёмности, запаса хода.
потом нарисовать на бумажке в масштабе конструкцию вместе с компоновкой узлов
потом уже можно начать подбирать контроллеры, привода, аккумуляторы и т.п.
вес устройства, количество колёс/моторов, размеры всего и вся.
желаемые параметры типа скорости, грузоподъёмности, запаса хода.
потом нарисовать на бумажке в масштабе конструкцию вместе с компоновкой узлов
потом уже можно начать подбирать контроллеры, привода, аккумуляторы и т.п.
Re: Как собрать робота с нуля? (Читать всем!)
Попробую более чётко описать.
Вес устройства: не принципиален(в пределах разумного)
Количество колёс: 4 или 6, пока не определился. По поводу количества моторов, надеюсь на ваши советы.
Размеры: около 50см*40см. Жду предложений, что и как лучше?
Тип скорости: желательно три типа скорости: медленная, обычная, форсаж.
Грузоподъёмность: максимальная.
Запас хода: есть предложения?
Нужен хотя бы примерный список необходимых деталей. Чтобы начать. Желательно не очень дорогих.
Вес устройства: не принципиален(в пределах разумного)
Количество колёс: 4 или 6, пока не определился. По поводу количества моторов, надеюсь на ваши советы.
Размеры: около 50см*40см. Жду предложений, что и как лучше?
Тип скорости: желательно три типа скорости: медленная, обычная, форсаж.
Грузоподъёмность: максимальная.
Запас хода: есть предложения?
Нужен хотя бы примерный список необходимых деталей. Чтобы начать. Желательно не очень дорогих.