Понравилась тема forum10/topic6195.html
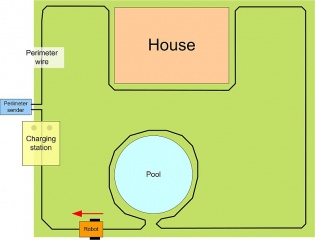
Решил за основу взять DIY проект Ardumower.de
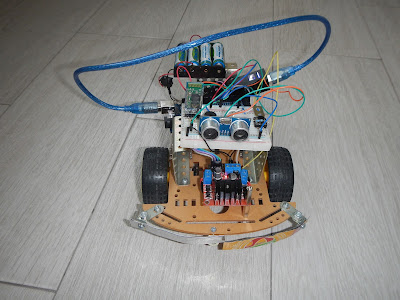
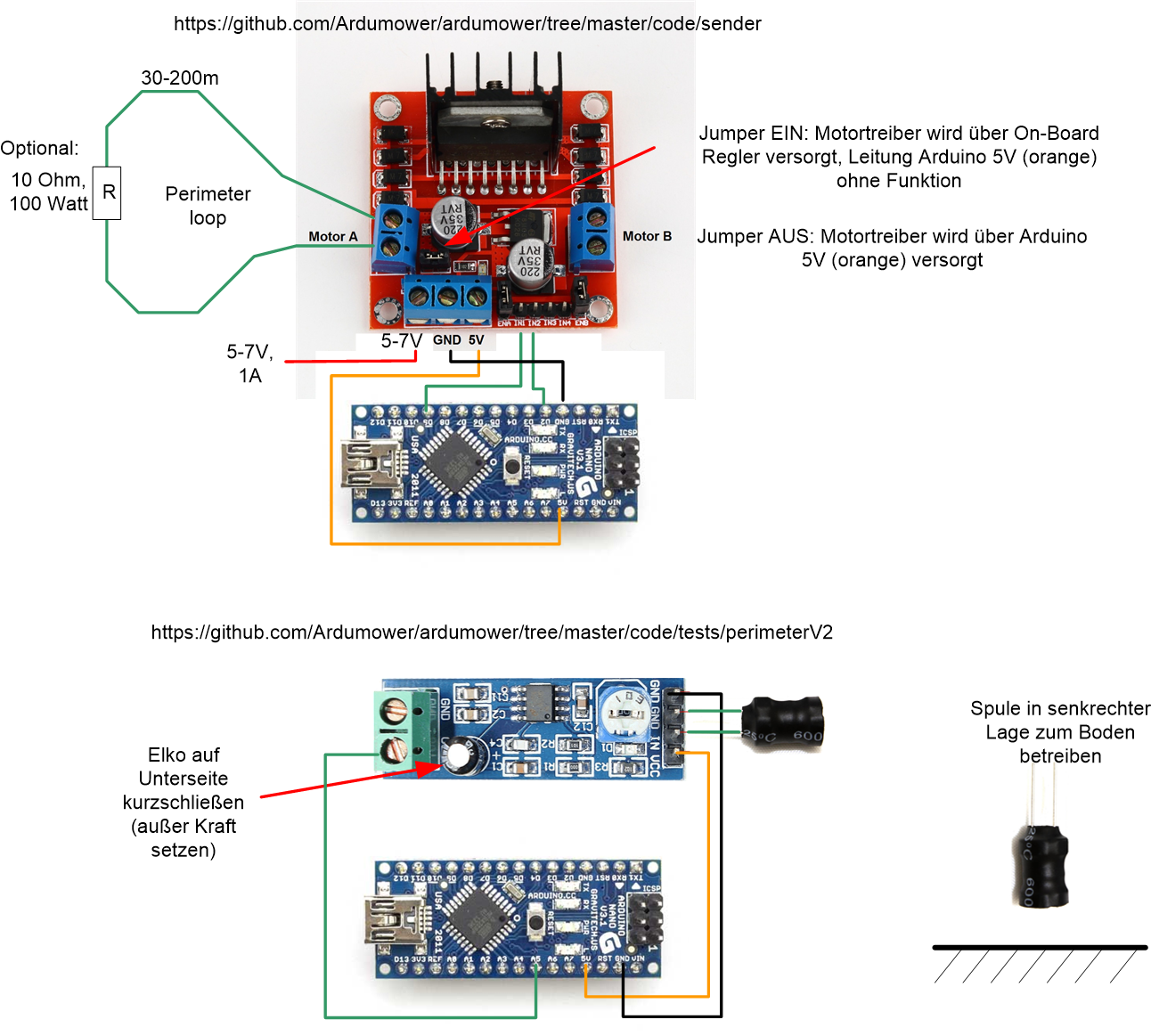
Начать решил с "тестовой" версии, благо основные комплектующие имелись (тележка, мега, сонар, драйвер двигателя, БТ)
На выходе получил почти такого таракана, только без датчика периметра (это черная пипка спереди на полиморфусе)

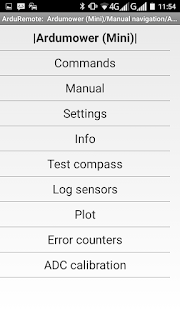
Скачал последнюю "прошивку" 1.0a6-Azurit
Указал в конфиге, что у меня мини, в коде оказались ошибки, потанцевал с бубном, вгрузил... и тишина.. в смысле ничего не происходит (лопасти/колеса не крутятся, только бипер (установленный при сборке мини ардумовера) противно пищит. Писк оказалось это фигня-проблема, решилась быстро. Начал проверять все компоненты по отдельности, дальномер, кнопка, бипер, моторы, синий зуб (не проверил) с тестовыми скетчами работают.
Сейчас копаю основной код. Сегодня наткнулся на раздел Troubleshooting
Вечером надо будет через консоль посмотреть на показания датчиков, может что увижу.
Энтузиастов прошу помощи, у многих есть для этого все необходимое. Вот привел список, что минимально понадобится
Даже если вам не нужен робот газонокосилка, проект имеет большой потенциал и алгоритм можно использовать в других проектах, например в роботе пылесосе.
На вскидку из полезняшек, что там есть:
алгоритм отслеживания уровня заряда/разряда и отправка робота на подзарядку;
навигация с использованием gps модуля;
одометрия;
защита от перегрузок (когда например заклинит двигатель);
управление через wi-fi;
и т.д.
Собирайте, скачивайте код и будем вместе осваивать.