с пальчиковыми батарейками можете не париться.... не сгорит... а у меня 8,4в и 3 банки в параллель = 30а токоотдачи и и около 6000 емкости... оно конечно идет через стабилизатор, тот держит до 3а. но этого хватило для одной сервы....
у вас еще в опыте вы долго банку не держите... а что если вашу "мину" нужно будет в полевых условиях тащить минут 5? если серва сдохнет то "мина" так и останется зажатой в роботе... следующую взять не получиться...
Строю сейчас гусеничные платформы. Начал с ГРАМАДЫ. Управление от 6-ти командного ПДУ. Далее с Малаховым Иваном сделали гусеничного Сапера.
Добавлено спустя 4 минуты 47 секунд: Гусеничный робот Сапер. Видео с его похождениями я, вроде, выставлял.
Добавлено спустя 6 минут 32 секунды: Он закончен. Сейчас работаем над Танкеткой. На ходу уже испытывали. В стадии завершения. Фото выставлю чуть позже. Не решили, что использовать в качестве сенсоров - УЗ или ИК. Или поставить оба.
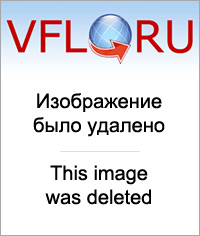
Добавлено спустя 17 минут 41 секунду: Начал работу над Амфибией. Планирую сделать ее 2-х корпусной. Плавающей. Покажу этапы работы над этим роботом. Может кому-нибуть будет полезно. Материал для корпусов взял от списанных компьютеров.
Добавлено спустя 3 минуты 27 секунд: Далее разметил.
Добавлено спустя 3 минуты 9 секунд:
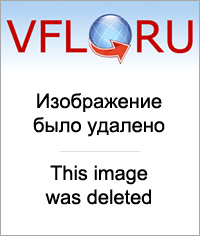
Добавлено спустя 2 минуты 43 секунды: Вырезал болгаркой.
Добавлено спустя 4 минуты 23 секунды: Проклеил поверхности соприкосновения толстым двусторонним скотчем, согнул и закрепил винтами М3.
Добавлено спустя 5 минут 23 секунды: Соединять корпуса буду через ЦПУ (центральный пружинный узел). Вот эскиз.
Добавлено спустя 4 минуты 22 секунды: Начало работы над корпусами.
Добавлено спустя 2 минуты 11 секунд: Установка гусениц.
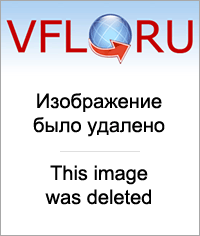
Добавлено спустя 2 минуты 14 секунд: Первый корпус вчерне готов.
Добавлено спустя 4 минуты 17 секунд: Опорные катки (желтые) самодельные. Из крышек от яблочного сока. Возня, конечно, но зато бесплатно.
клевые у вас корпуса получаются! а я все никак не соберусь себе сделать... все времени нет. каков итог вы планируете? какойто определенный функционал? или просто тестирование разных платформ?
Ну, во-первых, протестировать поведение своего изобретения - ЦПУ. Я его испытывал на Разведчике 3 (зеленом внедорожнике). Там он себя проявил замечательно! Одна пружина вместо четырех рессор! Во-вторых, проверю действие разных сенсоров. В-третьих, амфибий (плавающих роботов) я еще не делал.
Добавлено спустя 3 минуты 47 секунд: Да, все хотел спросить, у твоего робота сколько двигателей? Проходимость у него отличная!
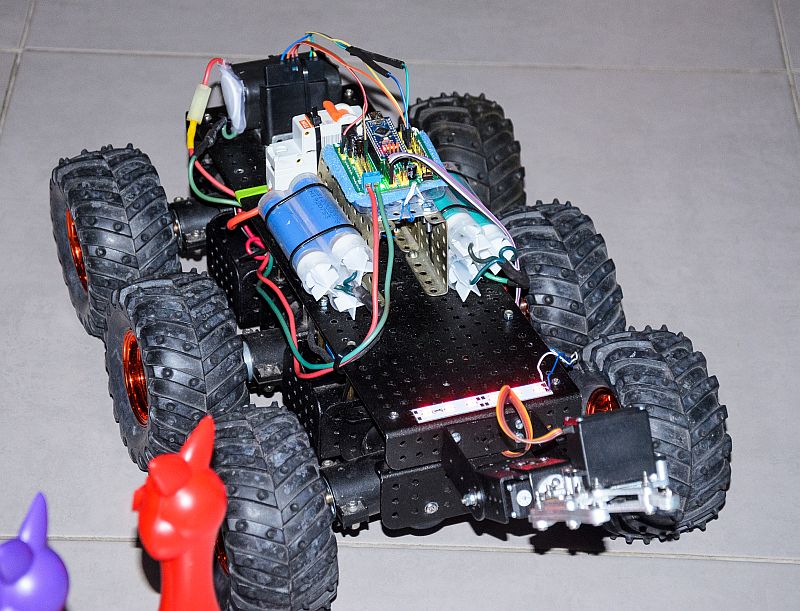
6 двигателей, по двигателю на каждое колесо. пороходимость на улице хорошая, кроме густой травы, и на густых коврах за счет подвески колеса начинают выгибаться в результате в хорошем сцеплении остается 3колеса и мощности рвать волокна ковра недостаточно, телега застряет
"6 двигателей..."! Да, это впечатляет! Я как-то сделал Монстрика. Он имел 6 колес с 6-тью мотор-редукторами, с возможностью подъема передних приводов для лучшего преодоления лестниц. По этот проект так и не был завершен. Потребовались колеса и моторы на другие роботы... Это вечное стеснение в средствах... Мотор-редукторы пришлось снять для гусеничных машин. Может быть по-позже вернусь к реализации Монстрика. А какие у тебя на твоем роботе аккумуляторы?
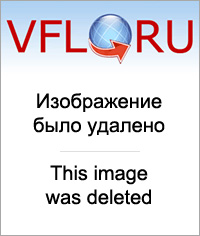
в качестве источника питания использую банки от разобранных ноутбучных акумов 3 в параллель х2 тоесть всего 6 банок, напряжение где то 8.4в правда хватает всего минут на 10-15 активной езды. зато стоят недорого, я купил у человека занимающегося ремонтом 5 акумов за 300руб, в каждом акуме по 6 банок. и того из 30 банок 26 нормальные.
а вы чем питаетесь? и с какого пульта управляете?
вот 6 банок в шприцах:
а вот по такому мохнатому ковру плохо поворачивает.
Я, в основном, использую аккумуляторы АА и ААА (пальчиковые и мизинчиковые) 1,2В. Реже батарейки 1,5В. Силовой блок ставлю 5-6 АА, электронику питаю от второго блока 4-5 АА или ААА. Хватает на полчаса-час работы. Потом, если надо, сменные аккумы, а разряженные на зарядку. Внедорожник, ГРАМАДА и Разведчик 3 управляются от 6-ти командного ПДУ (в свое время приобрел 3 приемника к нему). Гусеничный (с манипулятором и захватом) и Танкетка - от радиоуправления. Переход на радио идет от Ардуино UNO.
изначально пробовал питать от батареек, не хватает мощности. сейчас пытаюсь управление перевести на геймпад. но он неудобен в плане резкого хода рычагов.
если у машины не будет аммортизаторов, то это телега, которую колбасит от каждого небольшого камушка. так и с джойстиком, фильтром данные сглаживать нужно.
Angel71 писал(а):если у машины не будет аммортизаторов, то это телега, которую колбасит от каждого небольшого камушка. так и с джойстиком, фильтром данные сглаживать нужно.
lmspeed = -(ps2x.Analog(PSS_LY)-128); //скопировать данные джойстика в регистры правого и левого двигателя int tmp = -(ps2x.Analog(PSS_LX)-128); // rmspeed = lmspeed; lmspeed -= tmp; lmspeed *=2; rmspeed += tmp; rmspeed *=2; if (lmspeed>255) lmspeed =255; //ограничить макс. значения моторов if (rmspeed>255) rmspeed =255; // if (lmspeed<-255) lmspeed =-255; // if (rmspeed<-255) rmspeed =-255; //
странный вопрос. взять и применить к поступающим данным фильтр. а там уже от фильтра зависит, это смотря какой выберете/придумаете. может при присваивагии нужно будет просто добавить парочку простеньких математических действий над коофициентом, старым и новым значением. помимо коофициентов совсем не помешает ещё и время учитывать, но... это ещё и тикалку написать нужно.