 искать сначала лучше в общем, а не конкретные алгоритмы. как-то так: "алгоритмы растровой графики", "алгоритмы компьютерной графики",...
искать сначала лучше в общем, а не конкретные алгоритмы. как-то так: "алгоритмы растровой графики", "алгоритмы компьютерной графики",...roboforum.ru
Технический форум по робототехнике.
Гусеничный робот noname
Re: Гусеничный робот noname
на всякий искать сначала лучше в общем, а не конкретные алгоритмы. как-то так: "алгоритмы растровой графики", "алгоритмы компьютерной графики",...
искать сначала лучше в общем, а не конкретные алгоритмы. как-то так: "алгоритмы растровой графики", "алгоритмы компьютерной графики",...Re: Гусеничный робот noname
Korbofos писал(а):C квадратом разобрался как по карте передвигаться, а как быть с прямоугольником? И если его нужно развернуть градусов на 10 вокруг оси?
Гуглить по ключевому слову "аффинное преобразование"
http://en.wikipedia.org/wiki/Affine_transformation
Re: Гусеничный робот noname
Думаю с халтурить на карте робот будет кругом вместо прямоугольника
Re: Гусеничный робот noname
В плотную занялся компасом, после калибровки нашёл неточности в его работе. Где то на робофоруме читал что компас нужно выносить как можно дальше от металла... На антенне с сервоприводом сделать что-ли? чтобы не мешалась когда не нужна.
Re: Гусеничный робот noname
Установил компас на штанге с сервоприводом, и тут образовалась новая проблема, нужен более мощный сервопривод?
Re: Гусеничный робот noname
Тут проблема не в мощности, а во вхождении сервопривода в режим автоколебаний
Re: Гусеничный робот noname
Нужно что то типа успокоителя?
Re: Гусеничный робот noname
Да через рычаг нормально работает.
Re: Гусеничный робот noname
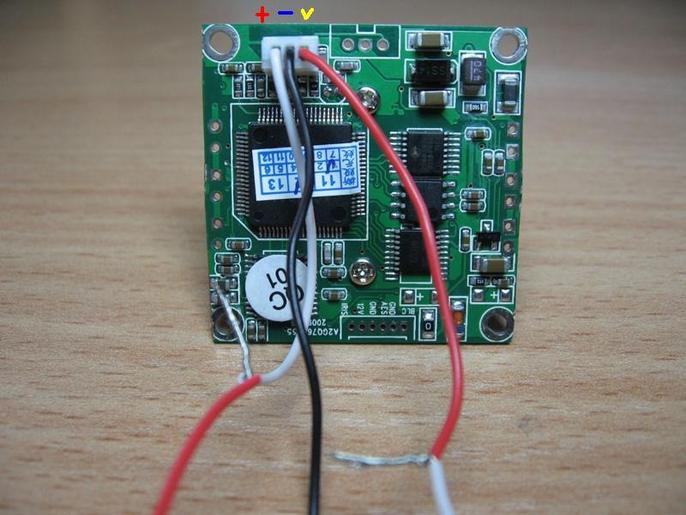
http://www.parkflyer.ru/51941/product/100745/?refcat=54421 пришла сия камера
Только проблема в том что на фишке и камере не совпадают + и видео выход, не понятно где перепутано на фишке или на камере
Только проблема в том что на фишке и камере не совпадают + и видео выход, не понятно где перепутано на фишке или на камере
Re: Гусеничный робот noname
вот так должно быть
Re: Гусеничный робот noname
спс. на фишке значит перепутано, у меня на камере так и подписано.
Добавлено спустя 9 минут 58 секунд:
А для чего жёлтый провод на передатчике, а то на фишке с ним тоже всё перепутано
Добавлено спустя 9 минут 58 секунд:
А для чего жёлтый провод на передатчике, а то на фишке с ним тоже всё перепутано
- Вложения
-
-
Re: Гусеничный робот noname
Робот похудел на 2кг благодаря li-po аккумулятору
Re: Гусеничный робот noname
Тест камеры
Цветопередача не очень радует, но в принципе нечего
Цветопередача не очень радует, но в принципе нечего
Re: Гусеничный робот noname
один из проводов (желтый либо белый) аудиовход.