Привет!
Собираю информацию об устройстве моющего окна робота Ecovacs W950. Буду очень признателен за фотографии/видео об этой модели.
В частности интересует механические утсройство робота, то как реализован повортный механизм, где стоят концевики и прочее.
В свою очередь готов поделиться если кому интересно информацией, что успел собрать на данный момент.
| |
roboforum.ruТехнический форум по робототехнике. |
|
Робот мойщик окон Ecovacs W950
Сообщений: 24
• Страница 1 из 2 • 1, 2
Робот мойщик окон Ecovacs W950
![]() nen777w » 27 ноя 2020, 14:53
nen777w » 27 ноя 2020, 14:53
- nen777w
- Сообщения: 12
- Зарегистрирован: 24 фев 2020, 22:51
Re: Робот мойщик окон Ecovacs W950
![]() Dmitry__ » 27 ноя 2020, 23:26
Dmitry__ » 27 ноя 2020, 23:26
nen777w писал(а):В свою очередь готов поделиться если кому интересно информацией, что успел собрать на данный момент.
У меня нет инфо по W950, но все интересно...
Мы тут реверсили хобота, печатали корпуса, замеряли тягу, разбирали работу акселерометра как датчика препятствий и многое друое. Рекомендую:
http://roboforum.ru/forum86/topic14836.html
-

Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Робот мойщик окон Ecovacs W950
![]() nen777w » 28 ноя 2020, 15:07
nen777w » 28 ноя 2020, 15:07
Dmitry__ писал(а):nen777w писал(а):В свою очередь готов поделиться если кому интересно информацией, что успел собрать на данный момент.
У меня нет инфо по W950, но все интересно...
Мы тут реверсили хобота, печатали корпуса, замеряли тягу, разбирали работу акселерометра как датчика препятствий и многое друое. Рекомендую:
http://roboforum.ru/forum86/topic14836.html
Спасибо почитаю.
Из того что у меня есть сейчас:
Китайский форум, на котором китаец разобрал, W850-го робота, и выложил фотографии и кое-какое описание: https://www.mydigit.cn/forum.php?mod=vi ... tid=125723
К сожалению картинки не просмотреть в нормальном разрешении, но Google все сделал, так что картинки вот: https://www.google.com/search?q=2018120 ... OfvfAYK1uM
{kind=link}
Что это дало:
- Двигатель: 35N709L070, производства NIDEC. Можно купить на Ali: https://www.aliexpress.com/item/4000904 ... 4c4dzWA5BP
Я уже заказал. Судя по спеке: https://m.1688.com/offer/530871018279.html Кушает не больше 3A, питание 24v Т.е. максимальная потребляемая мощность: 72W
А учитывая что БП для оригинального W950 всего 18v (так написано на корпусе) то получается что и 54W будет достаточно что бы удержать на стекле эту машину, весом 2kg.
Но опять-таки в спеке на W950 указано что мощность устройство 70W, так что становится немного непонятно, почему цифры не совпадают.
К слову сказать, я до того как нашел эту информацию, думал что там что-то мощнее и заказал на али вот этот мотор: https://www.aliexpress.com/item/3305219 ... 4c4drg8Jgy
Он действительно может свободно дойти до потребления 16A что дает нам 384W мощности. Так что пока не решил что буду ставить на своего робота.
- Колёса: Также можно купить на Ali: https://www.aliexpress.com/item/3288619 ... web201603_
Но я так делать не стал, замоделировал их вo Fusion360. Распечатал из PETG. Но буду переделывать, и кое что печатать из нейлона. Гусеницы отлил из полиуретана 40 (по Шору), форму для отливки тоже печатал.
Сцепление со стеклом вроде хорошее, но испытания покажут.
Для движения использую сервоприводы, вот такие: https://www.aliexpress.com/item/4000065 ... CDebD&mp=1
Тут очень бы хотелось узнать физические характеристики этих колёс размер гусениц, ширина, материал.
В оригинальных используется обычные DC моторы вроде как с червячной передачей (мои догадки).
- Датчик давления: Вот такой, также можно купить на Ali: https://www.aliexpress.com/item/3284649 ... 4c4drxukAk
Я уже заказал.
- Микроконтроллер, который планирую использовать ESP32 там на борту и WiFi и BT да и сам микроконтроллер довольно хороший.
- По корпусу: Видно, что на нижней стороне робота вокруг колёс и центрального вентилятора есть резиновый (полиуретановый) уплотнитель.

В рекламах говорят что это скребок, но по совместительству понятно что это еще и уплотнитель для создания разреженного пространства когда робот прижимается ко стеклу.
По фотографиям также видно, что с внутренней стороны робота, где стоит двигатель, также используется уплотнитель.

- По механике: Здесь пока что многое не понятно:
1) Как осуществляется поворот? Только ли за счёт движения гусениц в разные стороны или же что-то еще крутит саму "башню" внутри?
2) По видео видно что "башня" может двигаться относительно корпуса, и слышно как срабатывают концевики когда робот упирается в припятствие.
https://www.youtube.com/watch?v=MHvJ6SiuT-E
https://www.youtube.com/watch?v=IBYBrOlmLe0&t=48s
3) Что в "ногах" по углам робота? В некоторых рекламах говорят "колёсики", но на вид, выглядит как шарики. Думаю, что также с концевиками
для того что бы определить что робот съехал со стекла (если у стекла нет рамок).
Тоже есть на Ali: https://www.aliexpress.com/item/3299612 ... tent=47843
Но как то дороговато и по фотографиям не очень понятно как устроены. Просил продавца прислать больше фоток, но тот сказал что это все что у него есть.
Да и отзывы не очень.
Пока что есть.
- nen777w
- Сообщения: 12
- Зарегистрирован: 24 фев 2020, 22:51
Re: Робот мойщик окон Ecovacs W950
![]() Myp » 30 ноя 2020, 02:49
Myp » 30 ноя 2020, 02:49
Сенсор в ногах по углам обычная оптопара, стоит копейки.
ты денег потратил уже небось хватило бы робот купить.
немного другая модель но видно как поворачивает, гусеницы крутятся в разные стороны и за счёт этого поворачивается внутрянка
https://youtu.be/ErqM8fUJ9ys?t=55
сами гусеницы проще купить готовые, гарантированно будут работать https://www.aliexpress.com/item/4000218118715.html
Насчёт скребка уплотнителя... если достаточно сильно дуть, то уплотнитель не понадобится, штатный моторчик очевидно слабенький и нужен уплотнитель.
Но тут другая проблема, тебе же надо к нему провод тянуть, если там мотор на 18 ампер, то придётся искать провод толщиной с палец, желательно в силиконовой изоляции.
кроме того что потребуется его дофига метров что опять не дешево, этот провод сам по себе будет весить дофига и тянуть робота вниз.
само собой блок питания на 24 вольта и 18 ампер это кагбы тоже тоже проблема.
Так что к сожалению высокой мощностью проблему не решить.
ЗЫ
А почему именно квадратный на гусеницах?
у меня стекломой с двумя блинами полностью справляется с задачей.
ты денег потратил уже небось хватило бы робот купить.
немного другая модель но видно как поворачивает, гусеницы крутятся в разные стороны и за счёт этого поворачивается внутрянка
https://youtu.be/ErqM8fUJ9ys?t=55
сами гусеницы проще купить готовые, гарантированно будут работать https://www.aliexpress.com/item/4000218118715.html
Насчёт скребка уплотнителя... если достаточно сильно дуть, то уплотнитель не понадобится, штатный моторчик очевидно слабенький и нужен уплотнитель.
Но тут другая проблема, тебе же надо к нему провод тянуть, если там мотор на 18 ампер, то придётся искать провод толщиной с палец, желательно в силиконовой изоляции.
кроме того что потребуется его дофига метров что опять не дешево, этот провод сам по себе будет весить дофига и тянуть робота вниз.
само собой блок питания на 24 вольта и 18 ампер это кагбы тоже тоже проблема.
Так что к сожалению высокой мощностью проблему не решить.
ЗЫ
А почему именно квадратный на гусеницах?
у меня стекломой с двумя блинами полностью справляется с задачей.
-

Myp - скрытый хозяин вселенной :)
- Сообщения: 18018
- Зарегистрирован: 18 сен 2006, 12:26
- Откуда: Тверь по прозвищу Дверь
- прог. языки: псевдокод =) сила в алгоритме!
- ФИО: глубокоуважаемый Фёдор Анатольевич
Re: Робот мойщик окон Ecovacs W950
![]() Dmitry__ » 30 ноя 2020, 14:48
Dmitry__ » 30 ноя 2020, 14:48
Крутые появляются мойщики стекол, с большой площадью. Это и для висения хорошо и для смены тряпок. Мне мой хобот не нравится из-за площади, часто носки ему надо менять 
-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Робот мойщик окон Ecovacs W950
![]() Medtech » 01 дек 2020, 12:36
Medtech » 01 дек 2020, 12:36
Сам принцип не очень технологичен, медленно ползущая салфетка которая немного протирает стекло, это только для слабозагрязнённого стекла, люди жалуются что чтоб оттереть 1-2х месячное стекло надо несколько раз робота запускать, но так конечно завораживает своими поворотами, прямолинейным движением, но эффективность низкая, пока лучше вращающихся дисков ничего не придумано, лучше много раз вращение чем один раз проход.
nen777w возьмите салфетку, натяните её на платформу и попробуйте оттереть уличную сторону стекла за 1-2 прохода имитируя движение робота, получите полное представление о эффективности данного метода
nen777w возьмите салфетку, натяните её на платформу и попробуйте оттереть уличную сторону стекла за 1-2 прохода имитируя движение робота, получите полное представление о эффективности данного метода
-

Medtech - Сообщения: 562
- Зарегистрирован: 20 апр 2015, 22:02
- Откуда: Москва
- Skype: sergelola
- ФИО: Сергей
Re: Робот мойщик окон Ecovacs W950
![]() Dmitry__ » 01 дек 2020, 15:38
Dmitry__ » 01 дек 2020, 15:38
Medtech писал(а):Сам принцип не очень технологичен, медленно ползущая салфетка которая немного протирает стекло
Мда, не подумал. Верю практикам.
Эх, нет в мире совершенства...

-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Робот мойщик окон Ecovacs W950
![]() Medtech » 03 дек 2020, 11:33
Medtech » 03 дек 2020, 11:33
Достаточно сделать чтоб платформа двигалась и совершала движение относительно перемещения, нужны разнонаправленные движения, вроде уже есть такие с платформой трясучкой, достаточно амплитуды 1-2 см и частотой не менее Герца, вот оно уже будет отлично оттирать ну и плюс как у топикстартера уплотнение присоски при движении тоже будет сдвигать гряз как скребком в зависимости от конструкции, но в тоже время и набирать грязь на этот скребок.
Квадратная салфетка даёт иллюзию что углы окна будут протёрты, но там как раз у робота датчики падения, по этому пока конструкция с двумя вращающимися дисками рулит, но люди усердствуют и брызгают много жидкости, а движки на вентиляторы сейчас пошли бесколлекторные - дохнут от попадания жидкости, да и на плату та-же жидкость попадает, смачивать надо очень умеренно, в инструкции обычно правильные совет. Ну и как в роботах пылесосах, чем чаще запускаешь тем меньше канители, на полугодовое стекло надо много запусков.
Квадратная салфетка даёт иллюзию что углы окна будут протёрты, но там как раз у робота датчики падения, по этому пока конструкция с двумя вращающимися дисками рулит, но люди усердствуют и брызгают много жидкости, а движки на вентиляторы сейчас пошли бесколлекторные - дохнут от попадания жидкости, да и на плату та-же жидкость попадает, смачивать надо очень умеренно, в инструкции обычно правильные совет. Ну и как в роботах пылесосах, чем чаще запускаешь тем меньше канители, на полугодовое стекло надо много запусков.
-
Medtech - Сообщения: 562
- Зарегистрирован: 20 апр 2015, 22:02
- Откуда: Москва
- Skype: sergelola
- ФИО: Сергей
Re: Робот мойщик окон Ecovacs W950
![]() Scorpio » 03 дек 2020, 19:22
Scorpio » 03 дек 2020, 19:22
У меня W830 валяется (правда не там, где я сейчас).
Писал про него в "прилипале":
У меня огромные окна от пола до потолка. И робот первым делом стал застревать и сбиваться с курса при мытье контура, цепляясь за резинку уплотнения стекол к алюминевой раме своими углами. Пришлось все углы стекломоя снабдить тефлоновыми скобами. К томуже стекломой продали по интернету без батареи, хотя про наличие батареи явно оговаривалось. Т.е. при потере питания робот бодро сползал и отрывался. И без страховки использовать было не возможно. Продавец долго пудрил мозги, что мол батарея в пути из США, парится на таможне и т.п. Потом просто слился. В конце концов приобрел фирменную батарею в сервисном центре, по цене в пол-стекломоя. Естественно, половину работы приходится делать самому: переодеть, постирать салфетки, затереть разводы, после работы робота, и. т.д. Но иллюзия свободы от рутинной работы всеже присутствует.
Писал про него в "прилипале":
У меня огромные окна от пола до потолка. И робот первым делом стал застревать и сбиваться с курса при мытье контура, цепляясь за резинку уплотнения стекол к алюминевой раме своими углами. Пришлось все углы стекломоя снабдить тефлоновыми скобами. К томуже стекломой продали по интернету без батареи, хотя про наличие батареи явно оговаривалось. Т.е. при потере питания робот бодро сползал и отрывался. И без страховки использовать было не возможно. Продавец долго пудрил мозги, что мол батарея в пути из США, парится на таможне и т.п. Потом просто слился. В конце концов приобрел фирменную батарею в сервисном центре, по цене в пол-стекломоя. Естественно, половину работы приходится делать самому: переодеть, постирать салфетки, затереть разводы, после работы робота, и. т.д. Но иллюзия свободы от рутинной работы всеже присутствует.
-

Scorpio - Сообщения: 2702
- Зарегистрирован: 30 сен 2008, 18:49
- Откуда: Где-то в Латинской Америке
Re: Робот мойщик окон Ecovacs W950
![]() nen777w » 05 дек 2020, 14:08
nen777w » 05 дек 2020, 14:08
Myp писал(а):Сенсор в ногах по углам обычная оптопара, стоит копейки.
ты денег потратил уже небось хватило бы робот купить.
Не в деньгах дело, а в инженерном интересе.

Да! Это понятно. Но какой принцип. Что перекрывает (или перестает перекрывать) оптопару когда робот натыкается ногой на препятствие?
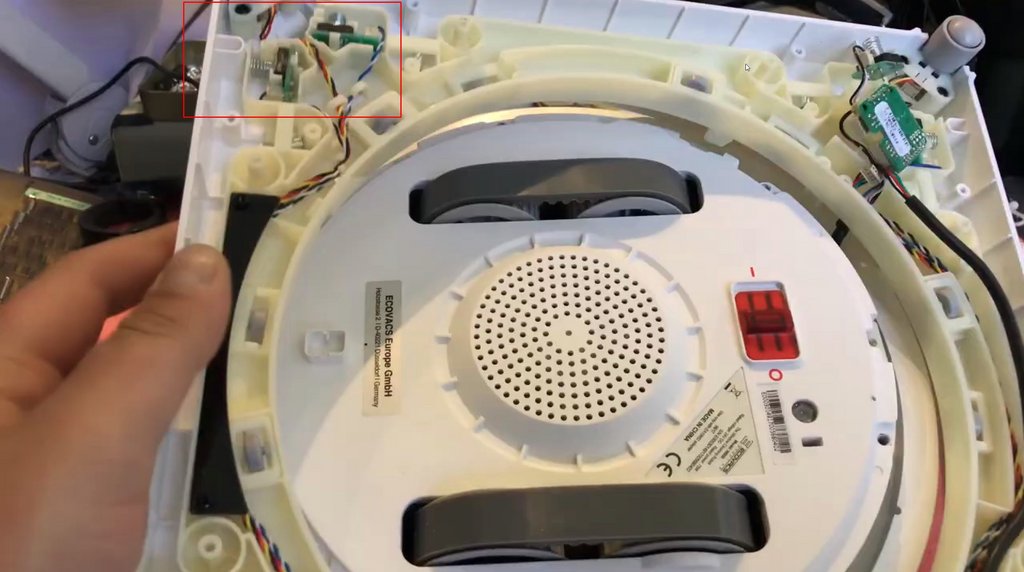
Еще раз скину фото (так как то то куда то пропало).
На фото видно что это нога (с шариком на конце) внутри стоит оптопара. Видно крепление. Непонятно что перекрывает оптопару и по какому принципу?
Разве что там пружинка и когда робот уходит ногой за стекло, нога выдвигается и что то перекрывает оптопару. Но тогда это не датчик препятсвия
а датчик достижения края. Хотя я тут подумал что наверно так и есть... даже на Ali написано Edge Detector. Так что наверно это мой затуп.

А вот то что робот на что то налетел?
По видео видно что "голова" робота "ходит" внутри корпуса достаточно свободно.
[youtube]https://www.youtube.com/watch?v=MHvJ6SiuT-E[/youtube]
Видно и слышно, что когда робот натыкается на что то то "голова" смещается (продолжает движение в направлении препятсвия) потом происходит щелчёк, откат назад и поворот "головы".
Непонятно следущее:
- Как свободно "голова" может вращатся внутри корпуса. Там есть какие то фиксаторы или же что то другое?
- Как устроено ее крепление внутри корпуса?
Myp писал(а):сами гусеницы проще купить готовые, гарантированно будут работать https://www.aliexpress.com/item/4000218118715.html
Я уже свои сделал. При наличии 3D принтера это не сложно.
Myp писал(а):Насчёт скребка уплотнителя... если достаточно сильно дуть, то уплотнитель не понадобится, штатный моторчик очевидно слабенький и нужен уплотнитель.
Но тут другая проблема, тебе же надо к нему провод тянуть, если там мотор на 18 ампер, то придётся искать провод толщиной с палец, желательно в силиконовой изоляции.
кроме того что потребуется его дофига метров что опять не дешево, этот провод сам по себе будет весить дофига и тянуть робота вниз.
само собой блок питания на 24 вольта и 18 ампер это кагбы тоже тоже проблема.
Так что к сожалению высокой мощностью проблему не решить.
Да вроде как штатный до 3A, писал уже что заказал, жду что бы проверить.
Уплотнитель можно из силикона отлить, также как я и гусенецы делал.
А так да, 18A мотор, пока в чертеж который делаю в Fusion360 встраивать не спешу.
Мне быд где то размеры раздобыть оригинала, и примерную конструкцию. Было бы очень полезно.
Myp писал(а):А почему именно квадратный на гусеницах?
Мне он показался достаточно эффективным.
Кстати салфетку на W950 я тоже заказал на али, так сказать пробную, да и что бы не заниматься еще этим вопросом.
Хочу делать в том же размере что и оригинал, но с ультразвуковым распилителем.
Medtech писал(а):Сам принцип не очень технологичен, медленно ползущая салфетка которая немного протирает стекло, это только для слабозагрязнённого стекла, люди жалуются что чтоб оттереть 1-2х месячное стекло надо несколько раз робота запускать, но так конечно завораживает своими поворотами, прямолинейным движением, но эффективность низкая, пока лучше вращающихся дисков ничего не придумано, лучше много раз вращение чем один раз проход.
nen777w возьмите салфетку, натяните её на платформу и попробуйте оттереть уличную сторону стекла за 1-2 прохода имитируя движение робота, получите полное представление о эффективности данного метода
У меня дома окон много, и они большие, так что будет лучше если этим будет робот заниматься
Scorpio писал(а):У меня W830 валяется (правда не там, где я сейчас).
У Вас размеров его нет случайно? Корпус, гусенецы, ширина, высота, расстояние между колёсиками?
Или побольше фоток?
- nen777w
- Сообщения: 12
- Зарегистрирован: 24 фев 2020, 22:51
Re: Робот мойщик окон Ecovacs W950
![]() nen777w » 10 дек 2020, 11:36
nen777w » 10 дек 2020, 11:36
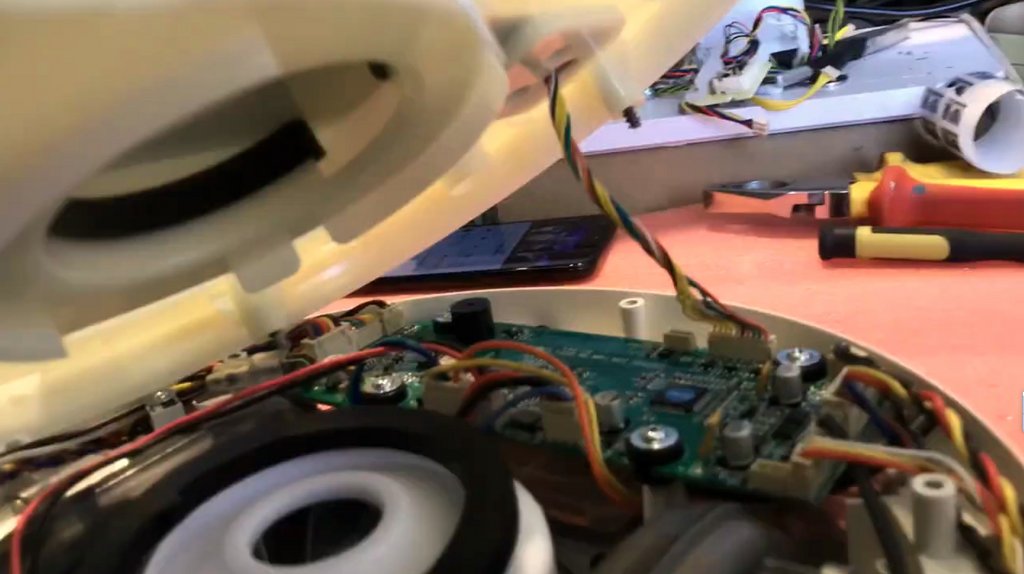
Удалось найти видео разборки W950-й модели.
https://www.youtube.com/watch?v=cIse1CJKaqQ
Местами порезано, ускорено. Но кое что понять можно (буду еще пересматривать).
Из того что уже сразу непонятно:
1) Когда откручивают дно. Зачем под ним находятся 8-мь пружинок. Разве что бы подпружинивать центральную часть робота? Но как это сделано?
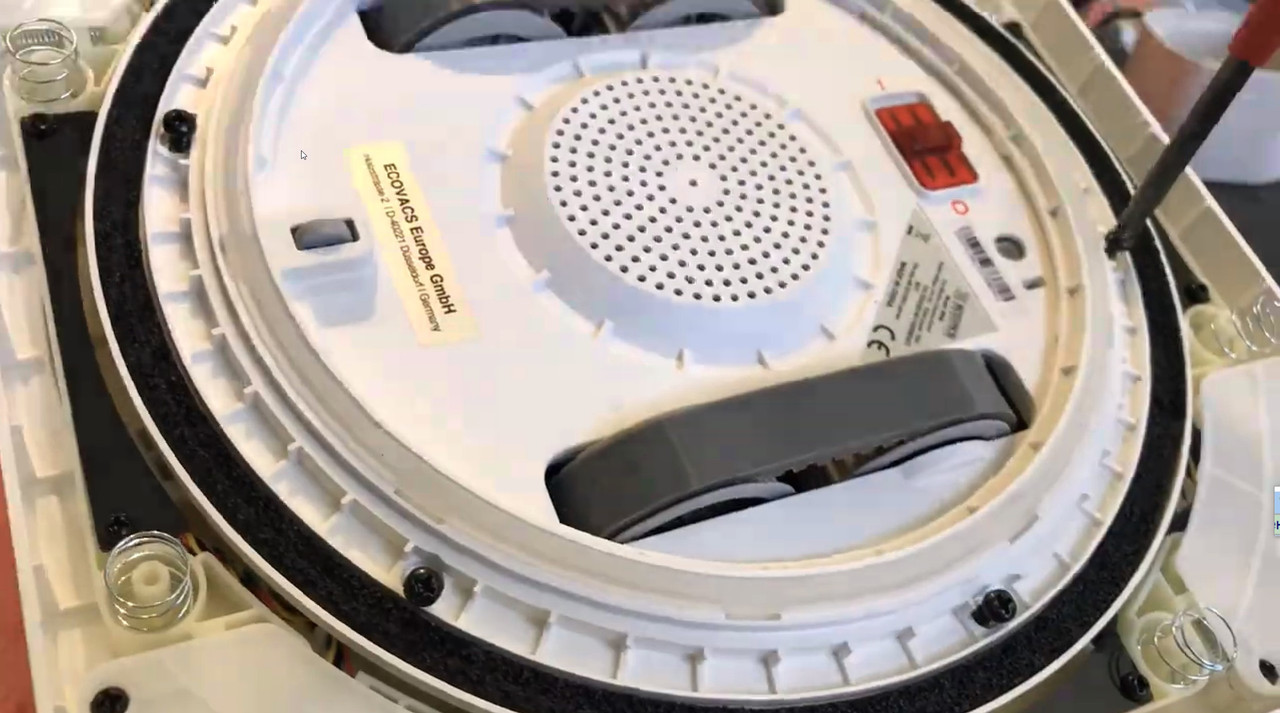
2) когда разбирают голову турбина и прокладка оказывается перевернутой. Т.е. она лежит не так как оно действительно должно быть.

Но будем считать что это монтаж. Или то что до этого видео кто то уже разбирал этого робота и неправильно его собрал.
Тут можно увидеть как выглядят оригинальные запчасти от W950:
https://ineedparts.eu/products/right-an ... 034d&_ss=r
https://ineedparts.eu/products/blower-f ... 034d&_ss=r
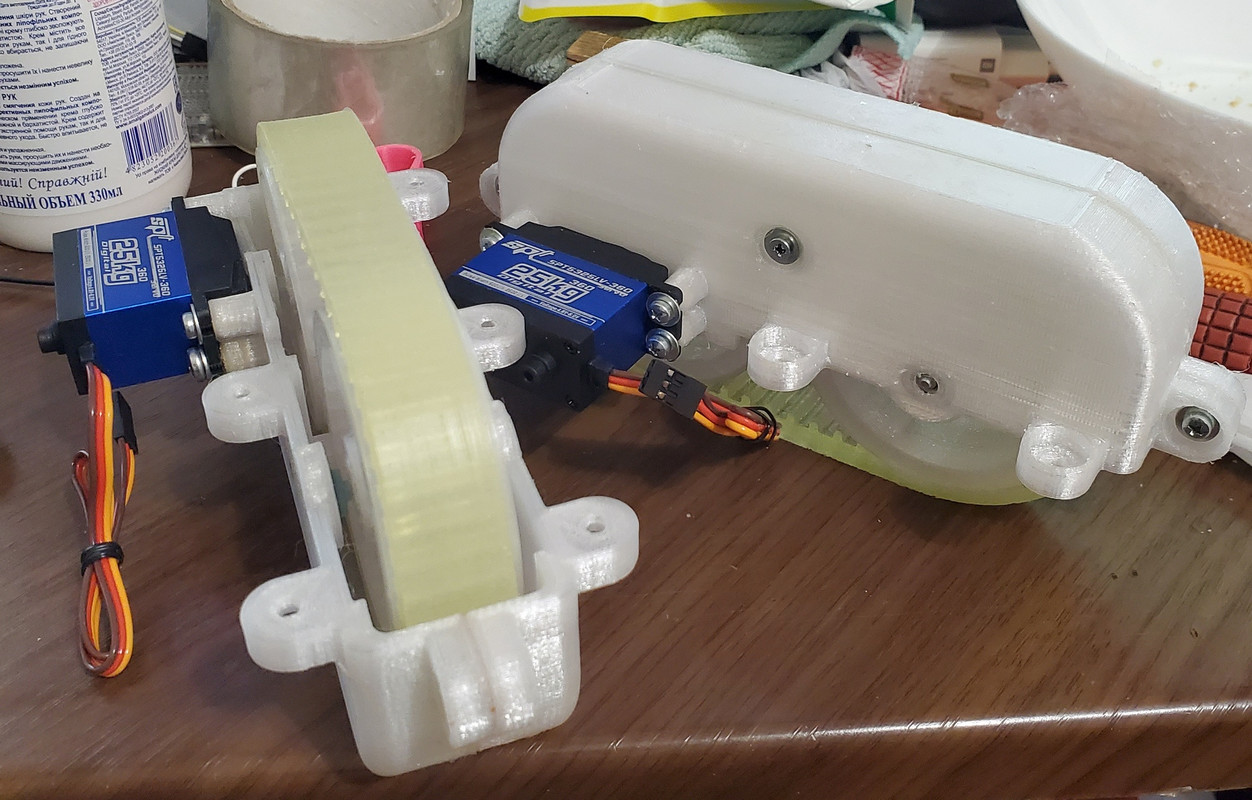
Еще вот по этой картинке, видно как работают концевики. Из чего можно сделать вывод что внутреняя часть (которая из более желтого пластика) не должна быть закреплена жестко внутри корпуса.
Также на ней видны ролики по которым происходит поворот "головы".
https://www.youtube.com/watch?v=cIse1CJKaqQ
Местами порезано, ускорено. Но кое что понять можно (буду еще пересматривать).
Из того что уже сразу непонятно:
1) Когда откручивают дно. Зачем под ним находятся 8-мь пружинок. Разве что бы подпружинивать центральную часть робота? Но как это сделано?
2) когда разбирают голову турбина и прокладка оказывается перевернутой. Т.е. она лежит не так как оно действительно должно быть.
Но будем считать что это монтаж. Или то что до этого видео кто то уже разбирал этого робота и неправильно его собрал.
Тут можно увидеть как выглядят оригинальные запчасти от W950:
https://ineedparts.eu/products/right-an ... 034d&_ss=r
https://ineedparts.eu/products/blower-f ... 034d&_ss=r
Еще вот по этой картинке, видно как работают концевики. Из чего можно сделать вывод что внутреняя часть (которая из более желтого пластика) не должна быть закреплена жестко внутри корпуса.
Также на ней видны ролики по которым происходит поворот "головы".
- nen777w
- Сообщения: 12
- Зарегистрирован: 24 фев 2020, 22:51
Re: Робот мойщик окон Ecovacs W950
![]() Medtech » 11 дек 2020, 13:14
Medtech » 11 дек 2020, 13:14
Охота конечно пуще неволи, лучше посмотрите на другой образчик без поворотного шасси, слишком многодельно,пружинки это прижим салфетки к поверхнотси, а две гусеницы вполне решают перемещение робота по всему стеклу и его повороты,стоит учитывать что в устройствах с прохождением большого количества воздуха не стоит применять смазку, пыль будет накапливаться, так же необходимо учитывать износ пластика при работе по сухому. И вообще не очень понятно желание разработчика сохранить ориентацию салфетки в одном направлении, ведь вся эта сложная механика только для этого . В роботе нет турбины, только вентилятор и он стоит правильно и уплотнитель правильно стоит.
-
Medtech - Сообщения: 562
- Зарегистрирован: 20 апр 2015, 22:02
- Откуда: Москва
- Skype: sergelola
- ФИО: Сергей
Re: Робот мойщик окон Ecovacs W950
![]() Scorpio » 11 дек 2020, 17:31
Scorpio » 11 дек 2020, 17:31
Есть еще вариант робота с магнитным удержаниемиз 2х половинок. Преимущества: отсутствие шума и малое потребление.
-
Scorpio - Сообщения: 2702
- Зарегистрирован: 30 сен 2008, 18:49
- Откуда: Где-то в Латинской Америке
Re: Робот мойщик окон Ecovacs W950
![]() nen777w » 11 дек 2020, 19:19
nen777w » 11 дек 2020, 19:19
Medtech писал(а):Пружинки это прижим салфетки к поверхнотси
Вы видео смотрели?
Я Вам перескажу. Там крышка (низ робота). Ее откручивают. Т.е. крышка прикручена болтами. А под ней уже пружинки, 8-мь штук.
Они никак не предназначены для прижима салфетки IMHO.
Medtech писал(а):а две гусеницы вполне решают перемещение робота по всему стеклу и его повороты,стоит учитывать что в устройствах с прохождением большого количества воздуха не стоит применять смазку, пыль будет накапливаться, так же необходимо учитывать износ пластика при работе по сухому.
Это понятно. Благодаря видео, стало понятно что центральная часть (которую я иногда называю "голова") вращается внутри на роликах.
Непонятно мне только как она там закреплена, так что она еще можне "ходить" внутри нажимая на концевики для учёта столкновений.
Medtech писал(а):И вообще не очень понятно желание разработчика сохранить ориентацию салфетки в одном направлении, ведь вся эта сложная механика только для этого . В роботе нет турбины, только вентилятор и он стоит правильно и уплотнитель правильно стоит.
Как правильно? Почему?
Там стоит этот мотор что я показывал и на видео IMHO он стоит неправильно. Так как всасывающее отверстие, в котором видны лопасти импеллера должно быть направлено вниз.
Добавлено спустя 19 минут 46 секунд:
Scorpio писал(а):Есть еще вариант робота с магнитным удержаниемиз 2х половинок. Преимущества: отсутствие шума и малое потребление.
Тоже вариант. Но и тут есть свои плюсы и минусы.
- nen777w
- Сообщения: 12
- Зарегистрирован: 24 фев 2020, 22:51
Re: Робот мойщик окон Ecovacs W950
![]() Myp » 13 дек 2020, 18:00
Myp » 13 дек 2020, 18:00
Scorpio писал(а):Есть еще вариант робота с магнитным удержаниемиз 2х половинок. Преимущества: отсутствие шума и малое потребление.
единственный минус, не для стеклопакетов.
-
Myp - скрытый хозяин вселенной :)
- Сообщения: 18018
- Зарегистрирован: 18 сен 2006, 12:26
- Откуда: Тверь по прозвищу Дверь
- прог. языки: псевдокод =) сила в алгоритме!
- ФИО: глубокоуважаемый Фёдор Анатольевич
Сообщений: 24
• Страница 1 из 2 • 1, 2
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0