Кстати, злодей, ты чего фотки прям сюда не заливаешь? Иало ли чё ТАМ приключится с серверами или ещё чем-то.. и мы тут чё, с битыми ссылками останемся? Завязывай давай с этой практикой.
elmot, спасибо! а фотки то со смещением в сторону сильно.... надо было много кадров MegaBIZON, я так повешусь с таким инетом как у меня... и не возможностью грузить фоты кучами за один раз меня не устраивают а с сервера как-то удобней
ай-ай-ай, ты из меня монстра не лепи телеку было 16 лет и + скачёк напруги в сети (а тут я уж думаю.... виноват ли я ) ибо взрыв был в то время когда я паял нечто ужасное (не скажу что ). сегодня почему-то пробки вышибло.... почему бы это?
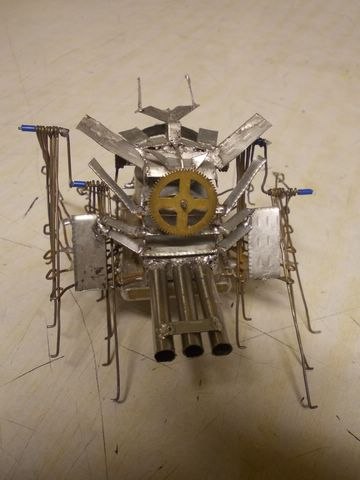
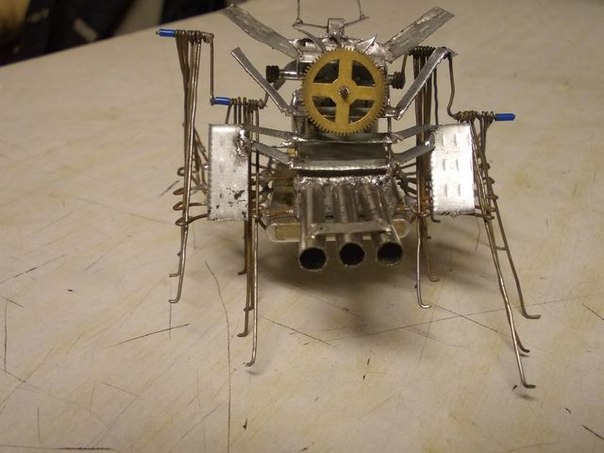
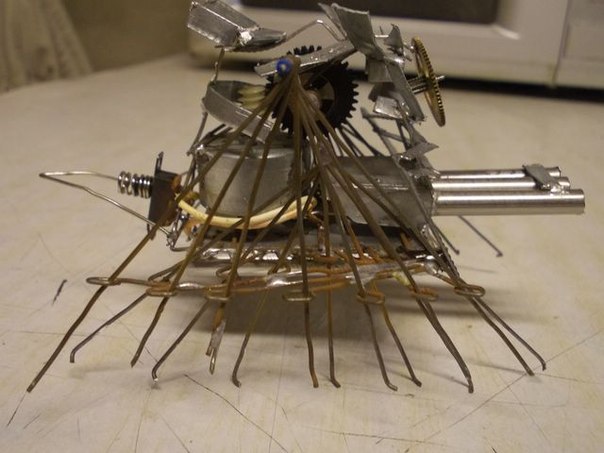
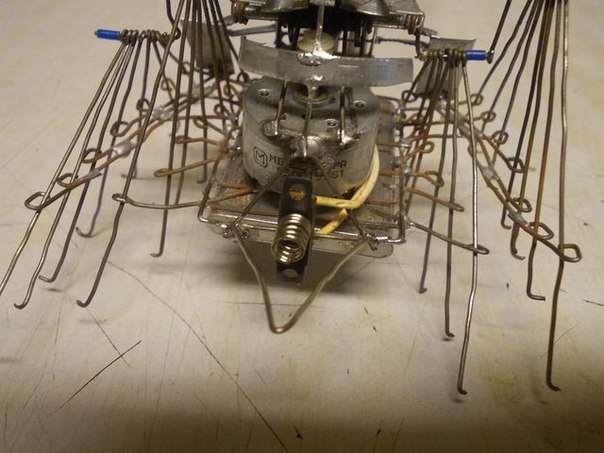
Люблю, когда есть стереофотки робота - по ним сразу все понятно. Вот и в этот раз вроде бы разобрался с устройством Акакия. Собрал его половину, только привод на ноги сделал как у Яка. Вроде в целом все работает как надо, хотелось бы получить замечания Мегабизона (по моим сведениям, Акакия никто не повторял, за исключением скрепкохода на 4-х сервах, но это не совсем то). Смотрим видео, если надо фоток каких-либо узлов - пишите.
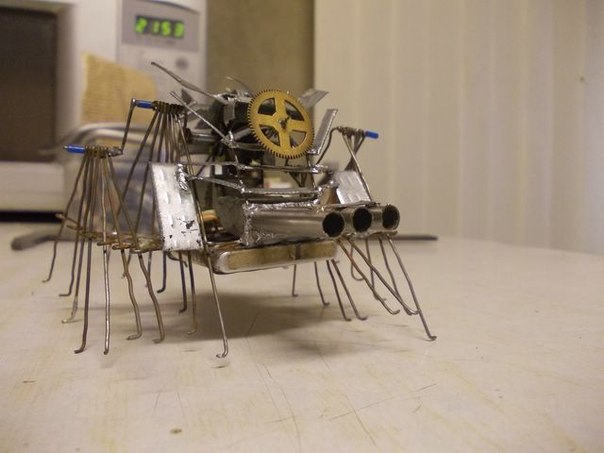
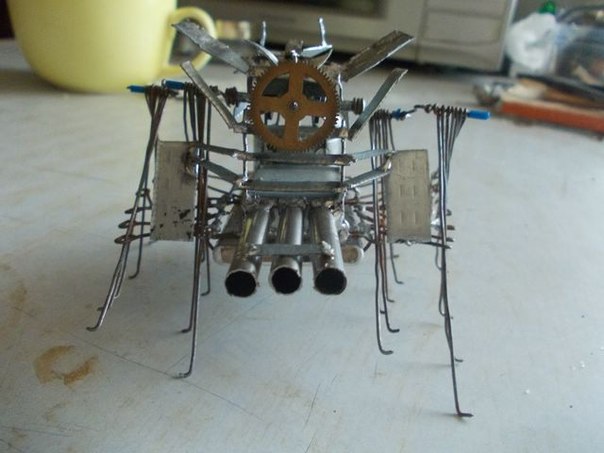
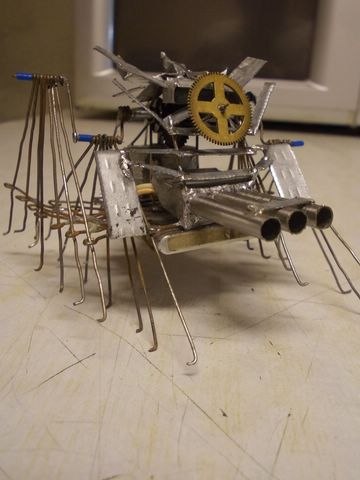
Хорошо. Расскажу о том, что собираюсь сделать. Первый двухмоторный шестиногий робот с мозгами. У него будет два лица, их можно увидеть в наших проектах, тема "Фотоглаз робота". Когда лица не используются - робот управляется по ИК. Одно лицо - ИК бампер + случайное блуждание без натыкания на стены. Второе лицо можно установить двумя способами: взгляд на пол и перемещение за пятном фонарика, и взгляд в небо и перемещение к источнику света (типа бим). Стороны будут синхронизированы простенькими энкодерами, я их уже проверил в деле - работают. Конструкция будет модульной, некоторые модули у меня уже есть от других роботов, некоторые делаю потихоньку.




 3Д.zip
3Д.zip

 с таким инетом как у меня... и не возможностью грузить фоты кучами за один раз меня не устраивают
с таким инетом как у меня... и не возможностью грузить фоты кучами за один раз меня не устраивают  а с сервера как-то удобней
а с сервера как-то удобней 




 ) ибо взрыв был в то время когда я паял нечто ужасное (не скажу что
) ибо взрыв был в то время когда я паял нечто ужасное (не скажу что 