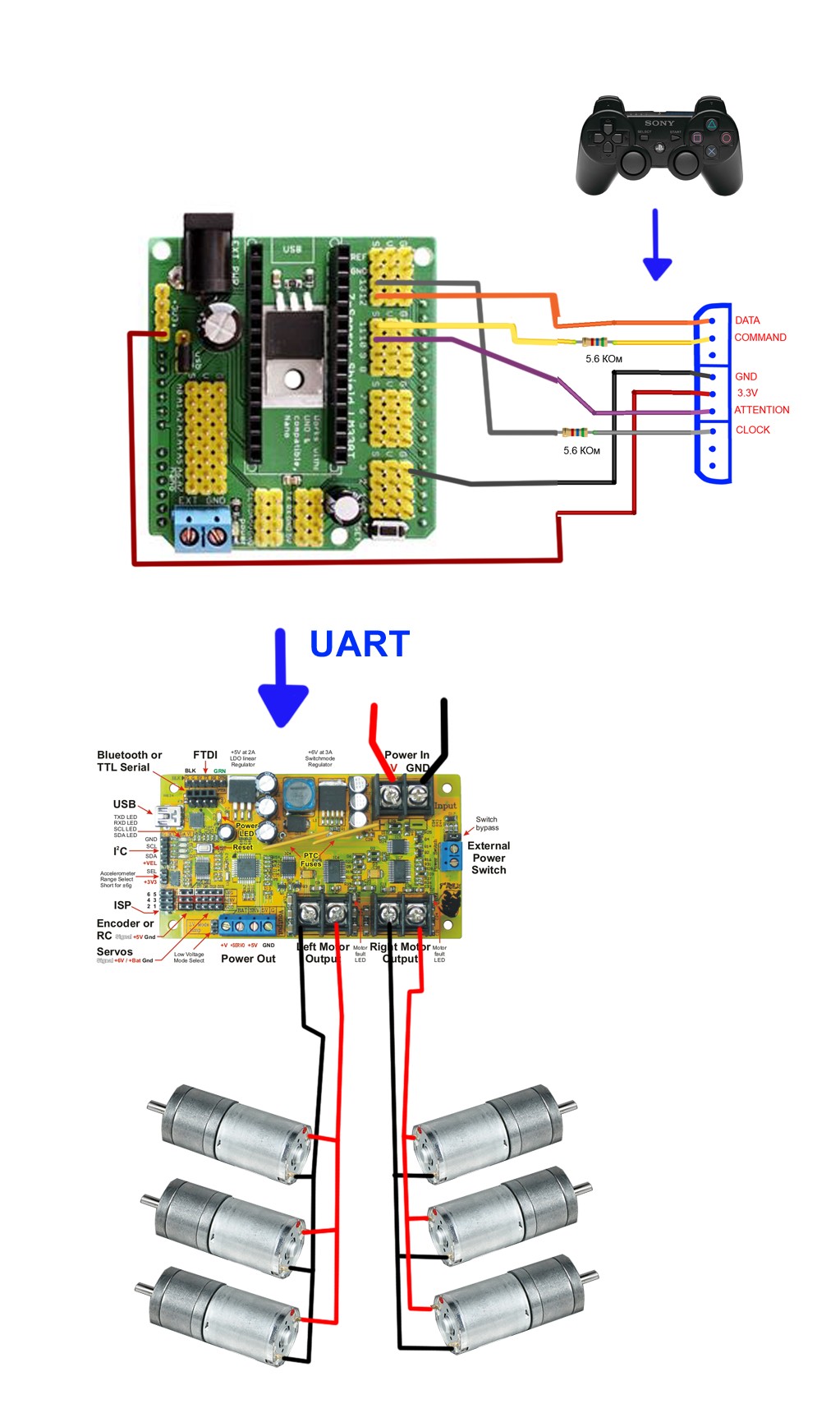
Found Controller, configured successful pressures = false
rumble = false
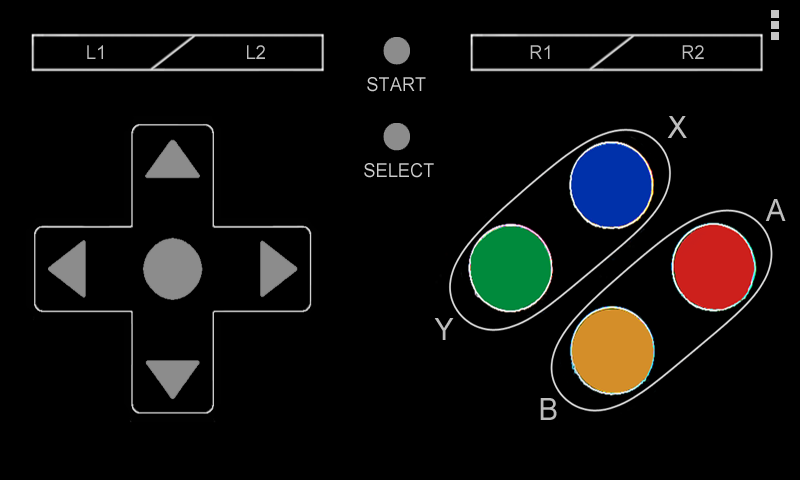
Try out all the buttons, X will vibrate the controller, faster as you press harder;
holding L1 or R1 will print out the analog stick values.
Note: Go to www.billporter.info for updates and to report bugs.
Unknown Controller type found L2 pressed
Stick Values:127,109,127,128
Stick Values:127,109,127,128
Start is being held
Start is being held
Start is being held
Select is being held
Select is being held
Select is being held
Select is being held
Select is being held
Select is being held
Select is being held
L2 pressed
Stick Values:127,110,127,128
Stick Values:127,109,127,128
Stick Values:127,109,127,128
Stick Values:127,109,127,128
Stick Values:127,110,127,128
Stick Values:127,109,127,128
Stick Values:127,109,127,128
Stick Values:127,109,127,128
Stick Values:127,109,127,128
Stick Values:127,109,127,128
Stick Values:127,109,127,128
Stick Values:127,109,127,128
Stick Values:127,110,127,128
Stick Values:127,109,127,128
Stick Values:127,108,127,128
Stick Values:127,110,127,128
Stick Values:127,108,127,128
Stick Values:127,108,127,128
Stick Values:127,108,127,128
Stick Values:127,108,127,128
Stick Values:127,109,127,128
Stick Values:127,109,127,128
Stick Values:127,110,127,128
Stick Values:127,110,127,128
Stick Values:127,108,127,128
Stick Values:127,108,127,128
Stick Values:127,108,127,128
Stick Values:127,108,127,128
Stick Values:127,108,127,128
Stick Values:127,108,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
L2 pressed
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
R2 pressed
R2 pressed
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,0,128
Stick Values:127,128,0,128
Stick Values:127,128,0,128
Stick Values:127,128,0,128
R3 pressed
L3 pressed
R3 pressed
L3 pressed
Circle just pressed
Square just released
X just changed
X just changed
Triangle pressed
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
Stick Values:127,128,127,128
DOWN held this hard: 0
DOWN held this hard: 0
DOWN held this hard: 0
DOWN held this hard: 0
DOWN held this hard: 0
Up held this hard: 0
Up held this hard: 0
Up held this hard: 0
LEFT held this hard: 0
LEFT held this hard: 0
LEFT held this hard: 0
Right held this hard: 0
Right held this hard: 0
Right held this hard: 0
Select is being held
Select is being held
Select is being held
Start is being held
Start is being held
Start is being held
Start is being held
R3 pressed
Stick Values:127,107,127,128
Stick Values:127,107,127,128
Stick Values:127,107,127,128
Stick Values:127,107,127,128
 поржал с того примера кода. ладно, скучно с вами, уйду я от вас.
поржал с того примера кода. ладно, скучно с вами, уйду я от вас.




 2? максимум для быстрого теста функционала. а так интересней гетерогенная сеть из 3х и более железок.
2? максимум для быстрого теста функционала. а так интересней гетерогенная сеть из 3х и более железок.