 только 5й кмукам дороже простенького ведроидного смартфона с блюпупом. за 75$ (как сейчас на адафруите) так и носом покрутить можно. а чуть позже всё чаще будут появляться недорогие смарты с ble, это будет ещё приятней. на смарте можно было бы и картинку с камеры обрабатывать и кучу всего ещё (экран для морды/интерфейса, мобильный тырнет, вифи, в некоторых gps есть, динамики, микрофон и т.д.).
только 5й кмукам дороже простенького ведроидного смартфона с блюпупом. за 75$ (как сейчас на адафруите) так и носом покрутить можно. а чуть позже всё чаще будут появляться недорогие смарты с ble, это будет ещё приятней. на смарте можно было бы и картинку с камеры обрабатывать и кучу всего ещё (экран для морды/интерфейса, мобильный тырнет, вифи, в некоторых gps есть, динамики, микрофон и т.д.).roboforum.ru
Технический форум по робототехнике.
соединение 2х ардуин
Re: соединение 2х ардуин
только 5й кмукам дороже простенького ведроидного смартфона с блюпупом. за 75$ (как сейчас на адафруите) так и носом покрутить можно. а чуть позже всё чаще будут появляться недорогие смарты с ble, это будет ещё приятней. на смарте можно было бы и картинку с камеры обрабатывать и кучу всего ещё (экран для морды/интерфейса, мобильный тырнет, вифи, в некоторых gps есть, динамики, микрофон и т.д.).Re: соединение 2х ардуин
Это да, базара нет. Этот мир погубит ведроид 
Re: соединение 2х ардуин
а смартфон можно использовать как мозги и камеру для робота? я чтото думал только как пульт
можно ссылочки на реальные проеты где тоже самое что с камерой.... сделано на смарте... ?
можно ссылочки на реальные проеты где тоже самое что с камерой.... сделано на смарте... ?
Re: соединение 2х ардуин
slom писал(а):команды:
вперед, назад, лево, право,
поворот сервами пушки.
повороты сервами манипулятора
кнопка стрелять
кнопка автоматически сделать шаг вперед, схватить клешней что подвернется и закинуть назад.
Как вариант - просто повесить ардуины в параллель на УАРТ, чтобы каждая отвечала только на свои команды. Однако сложные команды типа вашей последней, должны выполняться целиком на одной ардуине. Это очень тупое решение, но вполне может быть, что, как минимум на первое время, вам его хватит.
Re: соединение 2х ардуин
slom писал(а):а смартфон можно использовать как мозги и камеру для робота? я чтото думал только как пульт
можно ссылочки на реальные проеты где тоже самое что с камерой.... сделано на смарте... ?
Пора тебе усложнять задания
Поисковый запрос: "arduino opencv android"
Йа нашел такое:
Re: соединение 2х ардуин
а я вот че нашел, шасси как у меня..


http://letsmakerobots.com/node/38338
Добавлено спустя 21 минуту 43 секунды:
порылся в инете, что то инфы совсем мало, а так чтобы кто то выложил свой проект с подробной схемой, скетчами и программами так нет совсем...
http://letsmakerobots.com/node/38338
Добавлено спустя 21 минуту 43 секунды:
порылся в инете, что то инфы совсем мало, а так чтобы кто то выложил свой проект с подробной схемой, скетчами и программами так нет совсем...
Re: соединение 2х ардуин
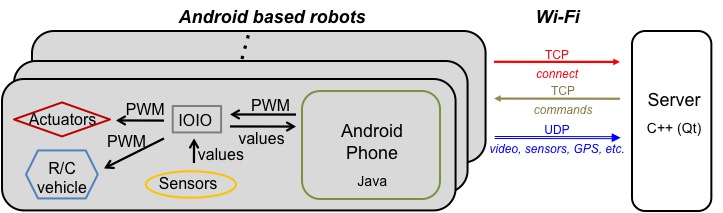
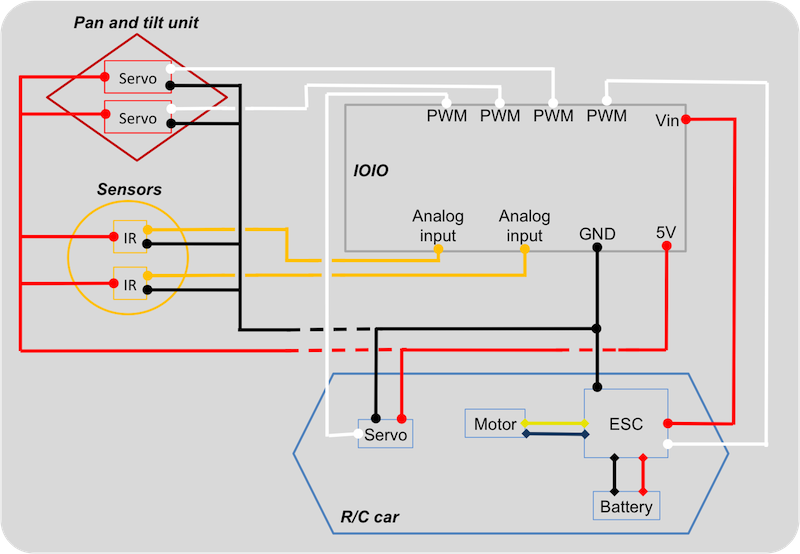
Вот тут что-то интересное, картинки радуют:
http://www.socsci.uci.edu/~jkrichma/ABR/
Плата IOIO-OTG
https://www.sparkfun.com/products/12633
https://github.com/ytai/ioio/wiki
Все открыто...
http://www.socsci.uci.edu/~jkrichma/ABR/
Плата IOIO-OTG
https://www.sparkfun.com/products/12633
https://github.com/ytai/ioio/wiki
Все открыто...
Re: соединение 2х ардуин
получил посылку с геймпадом.
проверил, работает...
у него свой блютус модуль, не требующий уарт, поэтому уарт на обеих ардуинах освобожден. насколько я понимаю через него можно проще наладить связь.
может у кого то есть пример кода когда с одной ардуины принимают команды с пульта или джойстика, а потом передают их на другую дуню где уже срабатывают моторы и сервы.
проверил, работает...
у него свой блютус модуль, не требующий уарт, поэтому уарт на обеих ардуинах освобожден. насколько я понимаю через него можно проще наладить связь.
может у кого то есть пример кода когда с одной ардуины принимают команды с пульта или джойстика, а потом передают их на другую дуню где уже срабатывают моторы и сервы.
Re: соединение 2х ардуин
формулировка особенного первого вопроса отвратительная.
описание работы с уартом на офсайте http://arduino.cc/en/Reference/Serial
описание работы с уартом на офсайте http://arduino.cc/en/Reference/Serial
Re: соединение 2х ардуин
есть код:
в нем джойстик от плейстейшин подключен к ардуине и управляет 2мя сервами и моторами.

как сделать так чтобы эта ардуина пересылала сигнал на другую ардуину через уарт и к той уже крепились эти сервы и моторы....
Добавлено спустя 2 минуты 4 секунды:
тоесть геймпад подключаем к 1й ардуине. 1ю ардуину подключаем ко 2й ардуине, к ней же подключаем сервы и моторы.
жмем кнопки на пульте, сигнал идет в1ю, там пересылается на 2ю и та уже управляет сервами и моторами... в теории все вроде просто, но как такой код должен выглядеть на практике?
- Код: Выделить всё • Развернуть
#include <PS2X_lib.h> //for v1.6
#include <Servo.h>
PS2X ps2x;
int PS2 = 0;
Servo LXservo;
Servo LYservo;
#define L_dir 2 //пины для драйвера мотора
#define L_pwm 3
#define R_dir 4
#define R_pwm 5
int mass[4]; //здесь будем хранить значения для скоростей и направлений
//mass[0] лев.напр.
//mass[1] лев.скор.
//mass[2] прав.напр.
//mass[3] прав.скор.
void setup(){
LXservo.attach(8);
LYservo.attach(6);
PS2 = ps2x.config_gamepad(13,11,10,12, true, true); //Настройка выводов: (clock, command, attention, data, true, true)
pinMode(L_dir, OUTPUT);
pinMode(L_pwm, OUTPUT);
pinMode(R_dir, OUTPUT);
pinMode(R_pwm, OUTPUT);
}
void loop(){
LXservo.write(map(ps2x.Analog(PSS_LX), 255, 0, 0, 180)); ;
delay(50);
ps2x.read_gamepad(false, 0);
LYservo.write(map(ps2x.Analog(PSS_LY), 0, 255, 0, 90)); ;
delay(50);
ps2x.read_gamepad(false, 0);
dir_pwm(ps2x.Analog(PSS_RY),2); //обрабатываем правый джойстик
digitalWrite(R_dir, mass[2]);
analogWrite(R_pwm, mass[3]);
}
void dir_pwm(int Y, int n){ //Подпрограмма для обработки значений джойстика
if (Y == 128){
mass[n+1] = 0;
}
if (Y >128){
mass[n+1] = Y*2-255;
mass[n] = 1;
}
if (Y <128){
mass[n+1] = 255-Y*2;
mass[n] = 0;
}
}
в нем джойстик от плейстейшин подключен к ардуине и управляет 2мя сервами и моторами.
как сделать так чтобы эта ардуина пересылала сигнал на другую ардуину через уарт и к той уже крепились эти сервы и моторы....
Добавлено спустя 2 минуты 4 секунды:
тоесть геймпад подключаем к 1й ардуине. 1ю ардуину подключаем ко 2й ардуине, к ней же подключаем сервы и моторы.
жмем кнопки на пульте, сигнал идет в1ю, там пересылается на 2ю и та уже управляет сервами и моторами... в теории все вроде просто, но как такой код должен выглядеть на практике?
Re: соединение 2х ардуин
получили данные с геймпада и отправляете в уарт. что значит как? для кого ссылку на офсайт давали? есть print, есть printf, есть write, можно напрямую с файловым потоком работать. берёте и отправляете. для получения данных там в классе куча ф-ий, берёте понравившиеся и получаете данные. или вам нужно на уровне кормления детей смесями? считываем данные с джойстика, смотрим, что изменилось. изменившиеся отсылаем в уарт. первый байт это идентификатор команды, следующий один или два это данные. или ещё кучей других вариантов, вангуя хотелки? 
Re: соединение 2х ардуин
мне еще рано смеси для кормления... мне бы сисю разжевать
конкретный пример хотца...
конкретный пример хотца...
Re: соединение 2х ардуин
удачи. это единственное, на что можете расчитывать с такой позицией.
Re: соединение 2х ардуин
что за вредные и злобные люди в Донецке...
менталитет у вас такой нехороший... недаром большинство беженцев что к нам переехало либо вообще не уживаюится и уезжают, либо делают это с большим трудом...
менталитет у вас такой нехороший... недаром большинство беженцев что к нам переехало либо вообще не уживаюится и уезжают, либо делают это с большим трудом...
Re: соединение 2х ардуин
следуя вашей логике крымчане или не способны на элементарные умственные действия или настолько ленивы и разбалованы, что будут до посинения ждать по каждой мелочи разжёвываний.  не дождётесь, я нормально к крымчанам отношусь и к вам в том числе. хохму "не уживаются" нужно будет знакомым рассказать, может пореже будут в гости вытягивать или выбраться погулять, просить электронику всякую настроить/починить, прекратят свои нелепые потуги за помошь деньги совать.
не дождётесь, я нормально к крымчанам отношусь и к вам в том числе. хохму "не уживаются" нужно будет знакомым рассказать, может пореже будут в гости вытягивать или выбраться погулять, просить электронику всякую настроить/починить, прекратят свои нелепые потуги за помошь деньги совать.  если вы не поняли смысл нежелания возни с примерами, могу ещё раз повторить - зачастую единственный вариант более-менее нормально научиться это изучать азы (в данном случае как минимум языка) и самостоятельное решение простеньких задач. когда человек с наскоку не осилил, то это уже единственный вариант, который может уберечь от постоянного спотыкания на каждой простенькой задачке. для начала просто брать самоучители/задачники и сотнями решать предлагаемые там задачки. с каждой решенной задачкой понемногу будет вырабатываться способность создавать алгоритмы. от того, что всё время будете только копипастить кусочки кода будете только развивать навык копипаста. или вы эти элементарные вещи не поняли ещё со школы, когда пачками решали задачи по математике, физике, химии,...?
если вы не поняли смысл нежелания возни с примерами, могу ещё раз повторить - зачастую единственный вариант более-менее нормально научиться это изучать азы (в данном случае как минимум языка) и самостоятельное решение простеньких задач. когда человек с наскоку не осилил, то это уже единственный вариант, который может уберечь от постоянного спотыкания на каждой простенькой задачке. для начала просто брать самоучители/задачники и сотнями решать предлагаемые там задачки. с каждой решенной задачкой понемногу будет вырабатываться способность создавать алгоритмы. от того, что всё время будете только копипастить кусочки кода будете только развивать навык копипаста. или вы эти элементарные вещи не поняли ещё со школы, когда пачками решали задачи по математике, физике, химии,...?
не дождётесь, я нормально к крымчанам отношусь и к вам в том числе. хохму "не уживаются" нужно будет знакомым рассказать, может пореже будут в гости вытягивать или выбраться погулять, просить электронику всякую настроить/починить, прекратят свои нелепые потуги за помошь деньги совать. если вы не поняли смысл нежелания возни с примерами, могу ещё раз повторить - зачастую единственный вариант более-менее нормально научиться это изучать азы (в данном случае как минимум языка) и самостоятельное решение простеньких задач. когда человек с наскоку не осилил, то это уже единственный вариант, который может уберечь от постоянного спотыкания на каждой простенькой задачке. для начала просто брать самоучители/задачники и сотнями решать предлагаемые там задачки. с каждой решенной задачкой понемногу будет вырабатываться способность создавать алгоритмы. от того, что всё время будете только копипастить кусочки кода будете только развивать навык копипаста. или вы эти элементарные вещи не поняли ещё со школы, когда пачками решали задачи по математике, физике, химии,...?