задумал я собрать 3-х осного робота на полностью самодельном шасси(кроме колёс) и сразу наткнулся на проблему выбора подвески.
на форуме неоднократно упоминалось оное, но не сравнивалось. так какая же из них лучше? какие типы есть вообще? вот 2 моих решения - первое для пассика я отверг как ненадёжное в плане проскальзывания, а второе - как на авто практически (пока только модель). собираюсь ставить на колесо мотор+редуктор, но тяжеловато, или гибкий вал (от спидометра мона) попробовать? а как в этом случае поворачивать т.к. танковый разворот не очень устраивает. может среднюю ось не двигать, а 2-мя крайними рулить (в смысле не оси ворочать, а колёса на них но тогда первая подвеска точно не подходит)? кто что думает по этому поводу? если интересно выложу чертежи
roboforum.ru
Технический форум по робототехнике.
какая подвеска лучше?
какая подвеска лучше?
- Вложения
-
-
-
Re: какая подвеска лучше?
По моему мнению, подвеска в роботе вешь абсолютно избыточная, если робот домашний то тем более (любое усложнение ведёт к уменьшению надёжности и увеличению веса). Если же планируется использовать робота на улице, то опять же нужно определиться для какой цели используется подвеска: чтоб передотвратить разрушение робота от ударных нагрузок при езде с высокими скоростями или для сохранности особо нежных комплектующих(типа винчестера, других нежных не знаю  ). Лично я бы делал жёсткое крепление к раме... Вариант 3-х осного робота .
). Лично я бы делал жёсткое крепление к раме... Вариант 3-х осного робота .
). Лично я бы делал жёсткое крепление к раме... Вариант 3-х осного робота .- Вложения
-
- demon7-2.jpg (26.45 КиБ) Просмотров: 9690
-
- andrew-72.jpg (7.71 КиБ) Просмотров: 9696
-
- andrew-71.jpg (7.64 КиБ) Просмотров: 9704
Re: какая подвеска лучше?
видел, читал. главное, хочу чтобы он безо всяких перекосов по лестницам шастал и препятствия штурмом брал. а насчёт нежных деталей вы правы - винт с мамой 286 будет (портов там понапихано и программировать удобно), да и любая плата тряску не любит (тем более камеру на него хочу - а картинка тоже тряски не выносит...). а паркетный мне не нужен. по улице гонять его буду со всеми прелестями второрй беды России . но затаскивать на 7 этаж без лифта его не хоцца, пусть сам. вот и задумал подвеску сварганить...
Добавлено спустя 7 минут 20 секунд:
большая засада здесь в том, как грамотно осуществлять поворот, т.е.колёса насадить.
а аппарат конечно впечатляет. интересно, а сколько груза на борт возьмёт
/вообще интересуюсь чисто практической пользой роботов т.к. ленив от природы, а ради забавы - через неделю его уже и в чулане не буит/
. но затаскивать на 7 этаж без лифта его не хоцца, пусть сам. вот и задумал подвеску сварганить...Добавлено спустя 7 минут 20 секунд:
большая засада здесь в том, как грамотно осуществлять поворот, т.е.колёса насадить.
а аппарат конечно впечатляет. интересно, а сколько груза на борт возьмёт
/вообще интересуюсь чисто практической пользой роботов т.к. ленив от природы, а ради забавы - через неделю его уже и в чулане не буит/
Re: какая подвеска лучше?
Ещё вариант , использовать колёса низкого давления, типа пневмохода , тут тебе и колесо и амортизатор в одном флаконе... А размер - уж какие камеры найдёшь (коляски детские, велики...). Управление только танковое, любое другое не позволит развернуться на месте, тем более в подъезде.
на счет грузоподъёмности предыдущего варианта, два моторедуктора от стеклоподъёмников таскали на себе местного производителя роботов - EdGullа, так что счититай, на той тележке их 6шт (и похоже не от стеклоподъёмников, а от стеклоочистилей, они мощней)
на счет грузоподъёмности предыдущего варианта, два моторедуктора от стеклоподъёмников таскали на себе местного производителя роботов - EdGullа, так что счититай, на той тележке их 6шт (и похоже не от стеклоподъёмников, а от стеклоочистилей, они мощней)
- Вложения
-
Re: какая подвеска лучше?
Denz. я не совсем в тему правда. а вместо 386го чтот посерьёзней нет желания/возможности/необходимости достать? просто помнится мне, что 386й уж очень медлительный. хотя не спорю - не очень я понял что именно будет на этот камушек возложено. я себе на бу`шке недавно VIA EPIA 5000 мать (форм фактор mITX) с камушком взал и памяти 256 к ней. на борту видло, ком, сеть, юсб. камень не оч шустрый (чуть больше 500MHz), зато мелкая и на проц не нужно никаких вентиляторов, да и кушает всё это мало. а. взял примерно за 30 бакинских. на бу и барахолках иногда подобное чтот проскакивает
Re: какая подвеска лучше?
спс за инфу. только боюсь проткнёт он колёса быстро. мозги нашёл asusA9rp(sempron1,5GG). 386 не справится точно т.к. большой поток инфы.
а всётаки почему уделяют больше внимания чему угодно, только не механике? А подвесочка - для равномерного распределения нагрузки на колёса. представьте ситуацию, когда робот забирается на бордюр под углом. при 6 колёсах 4(!!!) вывесятся. а они ведущие. получится как раз падение мощности на подъёме. совсем неэффективно. вот с подвеской могобыть и ни одно колесо не вывесится. конечно сложность передачи вращения на колёса, но по-моему выгода очевидна.
PS: я не имею ввиду паркетных роботов - им и так неплохо живётся.
Добавлено спустя 5 минут 37 секунд:
а на камушок пойдёт инфа для расчёта пути, управления двигателями, манипулятором(ШД),уз локатор, передача по радиоканалу и т.д...
а всётаки почему уделяют больше внимания чему угодно, только не механике? А подвесочка - для равномерного распределения нагрузки на колёса. представьте ситуацию, когда робот забирается на бордюр под углом. при 6 колёсах 4(!!!) вывесятся. а они ведущие. получится как раз падение мощности на подъёме. совсем неэффективно. вот с подвеской могобыть и ни одно колесо не вывесится. конечно сложность передачи вращения на колёса, но по-моему выгода очевидна.
PS: я не имею ввиду паркетных роботов - им и так неплохо живётся.
Добавлено спустя 5 минут 37 секунд:
а на камушок пойдёт инфа для расчёта пути, управления двигателями, манипулятором(ШД),уз локатор, передача по радиоканалу и т.д...
Re: какая подвеска лучше?
кстати Redallex предложил оч неплохой вариант конструкции. вот ещё вариантик:

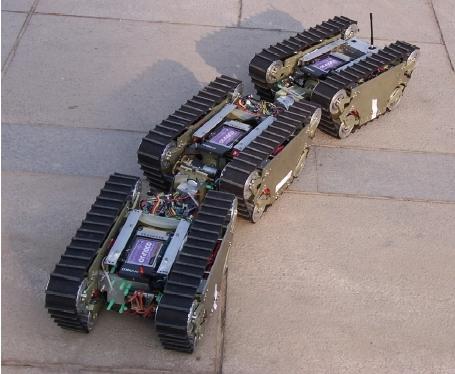
 колёса и лестницы конечно совместимы, но может таки лучше гусеницы? вот пара вариантов, оч легко по лестницам перемещаются:
колёса и лестницы конечно совместимы, но может таки лучше гусеницы? вот пара вариантов, оч легко по лестницам перемещаются:





колёса и лестницы конечно совместимы, но может таки лучше гусеницы? вот пара вариантов, оч легко по лестницам перемещаются:Re: какая подвеска лучше?
видел и таких монстриков. впечатляет конечно. просто прикинул все +/- обоих движителей в самых разных ситуациях, вплоть до грязи/песка/щебня и проч. - и выиграли колёса.
//тут надо учитывать все возможные ситуации+все невозможные+некоторые невообразимые. переделывать всегда сложнее, чем крепко подумать вначале. У меня уже 2 недели голова пухнет
он у меня как в городе, так и в деревне использоваться будет.вот там - настоящие испытания будут(лес/холмы>30град./трава>30см/двор с шелезяками/мало ли что ещё). собираюсь 2 аккума на него пожертвовать (щёлочь 6в45а*ч).
//тут надо учитывать все возможные ситуации+все невозможные+некоторые невообразимые. переделывать всегда сложнее, чем крепко подумать вначале. У меня уже 2 недели голова пухнет
он у меня как в городе, так и в деревне использоваться будет.вот там - настоящие испытания будут(лес/холмы>30град./трава>30см/двор с шелезяками/мало ли что ещё). собираюсь 2 аккума на него пожертвовать (щёлочь 6в45а*ч).
Re: какая подвеска лучше?
Denz писал(а):а всётаки почему уделяют больше внимания чему угодно, только не механике?
А всё потому, что механика это самая трудновыполнимая и затратная часть в любительском роботостроении, вот и делают из того что найдут... Да и роботами в основном занимаются люди более близкие к электронике с програмированием, и очень слабо представляющие хотя бы основы механики. Поэтому в идеале хорошую робоплатформу может сделать только команда из "электроника" , "механика" и "дизайнера" (в одном лице встречаются очень редко).
При наличии денег и кадров получается вот это , из viewtopic.php?f=8&t=5557 , который биотуалет
Denz писал(а):он у меня как в городе, так и в деревне использоваться будет.вот там - настоящие испытания будут(лес/холмы>30град./трава>30см/двор с шелезяками/мало ли что ещё).
Для защиты от "шелезяк" и прочих гвоздей на камеру можно поставить простейшую шину из куска брезента, что и делают любители на больших пневмаходах т.к.давление очень маленькое, проткнуть даже брезент будет трудно, для езды по земле , траве и прочему слабому грунту на брезет поставить аллюминивые заклёпки, как шипы...
Re: какая подвеска лучше?
Redallex прав: механикой менее всего занимаются обычно, хотя она и не менее важна
Re: какая подвеска лучше?
Для равномерного распределения нагрузки на колёса совсем не обязательна подвеска в её традиционном понимании
- Вложения
-
Re: какая подвеска лучше?
Denz, у вас сколько денег есть ?
Re: какая подвеска лучше?
и адресок следом скажите 

Re: какая подвеска лучше?
Ну а если очень хочется как у всех, то вот образчики, правда размерчики у них с маленький автобус Где взял не помню, но было ещё видео на сайте, конструкция подвески не видна, но как работает!!!
Где взял не помню, но было ещё видео на сайте, конструкция подвески не видна, но как работает!!!- Вложения
-
- mule8.jpg (33.51 КиБ) Просмотров: 8630
-
- mule7.jpg (49.81 КиБ) Просмотров: 8661
-
-
- mule4.jpg (29.55 КиБ) Просмотров: 8648
Re: какая подвеска лучше?
оптимальный вариант 4 колесика из поста #Redallex » 14 май 2009, 12:07
1. Проходимость вплоть до плавания
2. Низкий вес и габарит при сдутии
3. Возможность танкового разворота
Камеры за счет низкого давления и большой площади могут без покрышек сезон бегать. А видео, если нужно, можно на гироскоп зацепить.
1. Проходимость вплоть до плавания
2. Низкий вес и габарит при сдутии
3. Возможность танкового разворота
Камеры за счет низкого давления и большой площади могут без покрышек сезон бегать. А видео, если нужно, можно на гироскоп зацепить.