dccharacter писал(а):Спасибо, что разместили фотографии членов жюри. Эти люди достойны уважения.
А Вы, уважаемый, обратили внимание на то, что это не просто фотографии, а ссылки. По ним мышечкой щелкать можно. Я там, специально для вас, рамочку в 8 пикселей поставил. Раньше было 3 пиксела. Для Вас сделал 8!
И ещё, весна здесь совершенно ни при чем. Просто раньше руки не доходили - было много других неотложных дел: на работе - две серьёзнейших комиссии, одна за другой, ...
Dmitry__ писал(а):Даааа. Aleks, что тебе мешает делать это без них? Или на распил хочешь попасть?
Ну, не доверять же столь важное, приятное и ответственное дело, как делёжка денег, кому-то постороннему!!! .
А если серьезно, то "распилом" занимаются как раз мои оппоненты - они пытаются втюхать руководству РФ очередное абсолютно бесполезное "сидение в барокамерах". Хотя ими же самими в 90 годах было доказана бесперспективность этого направления. При желании могу кинуть ссылку на соответствующий официальный документ.
То, что я предлагал уже в 1997 г.: http://deepdivertech.narod.ru/rd.htm - намного проще, чем вскрывать черепную коробку и подключать к мозгам провода. Могут и списать! - И будет у них аватар-солдат.
Aleks писал(а):Ба! Какие же Вы, RUSANDROID, молодцы!
Хватит рекламировать свой сайт водолазов. Вы можете пользоваться личными сообщениями. Сергей.
Уважаемый господин Кашликов! Ну, зачем же так?! Очень нехорошо «резать» чужие комментарии, неприлично! Так ведь Вы от моего имени можете настрочить бог знает чего. А потом меня на дуель вызовут! Нехорошо получается! Я, например, с Duhasом, на паяльниках или молотках драться не хочу – он у меня как-то просил banHAMMER или mjolnir http://roboforum.ru/forum7/topic10647-90.html?style=8
Давайте вести себя цивилизовано!
Полагаю, что у каждого человека есть право высказаться здесь ведь «ОТКРЫТЫЙ технический форум по робототехнике». Я вроде бы никого не оскорблял (во всяком случае никого «дэбилом года» не называл), веду себя адекватно, так что мне не понятно, почему мои комментарии «режут».
Вы, Сергей, наверное, «обиделись» на меня за то, что оказались неправы. Причем неправы ПУБЛИЧНО http://roboforum.ru/forum7/topic10647.html?style=8 – слишком много троллили меня. И вот теперь, пользуясь статусом админа, мстите, кромсая мои комментарии на свой вкус. Мелко это.
Давайте-ка обсудим ситуацию без эмоций, будем рассуждать логически.
Условимся, что не будем отвлекаться на дискуссию о том, какие должны быть роботы: на колесах, гусеницах или антропоморфные двуногие – иначе эта дискуссия надолго уведёт нас в сторону.
Предположим, как в данном случае с RUSANDROID, что наш робот должен быть антропоморфным и передвигаться на двух ногах.
Возникает вопрос: «Какие способы управления для такого робота можно предложить?»
На мой взгляд, могут быть три варианта ответа:
1. Искусственный интеллект 2. Вскрыть черепную коробку человека и подключить провода к мозгам 3. Дистанционное управление в копирующем режиме
Последовательно обсудим все три варианта.
Искусственный интеллект – очень перспективно и за этим направлением, несомненно, будущее, но… в данное время это едва-ли реализуемо. Роботы с искусственным интеллектом пока что всё-таки довольно глупенькие: http://deepdivertech.narod.ru/joke.htm
Рассмотрим второй вариант: вскрытие черепной коробки и подключение проводов к мозгам. В США макакам «в башку вбивали гвозди»: - после этого они могли управлять роботизированной рукой. В средствах массовой информации по поводу создания DARPA аватара много раз повторялось об успешных опытах с макаками.
Однако как обстоят дела в данной системе с обратной связью? Осмелюсь предположить, что обезьяны управляли рукой–манипулятором визуально. А теперь представьте, что у вы пытаетесь с помощью такого способа управлять не одной рукой, а полноценным антропоморфным роботом: две руки + две ноги + … Спрашивается: «А глазЫ у вас в разные стороны не разбегутся от такого обилия конечностей?» Полагаю, здесь придётся не только посылать сигналы управления роботу, но и от робота передавать сигналы в мозг человека-оператора. А это серьёзно усложняет проблему. Ведь кроме сигналов о положениях конечностей робота необходимо будет передавать человеку-оператору и информацию об угловой ориентации корпуса робота. Следует заметить, что информация о пространственном положении (особенно для вертикально ходящих организмов и роботов) является весьма существенной, не даром органы равновесия у биологических существ появились ещё в глубокой древности: http://deepdivertech.narod.ru/otoconic.htm
Органы равновесия у человека запрятаны глубоко в черепную коробку. Получается, что для того что бы осуществлять управление антропоморфным роботом человеку придется расковырять весь череп! А, кроме того (ОЧЕНЬ ВАЖНЫЙ МОМЕНТ!) – у человека-оператора придётся отключить от мозга собственные сенсоры от всех конечностей и органов равновесия – что бы они не создавали помех при управлении роботом!
Ну как, есть добровольцы поуправлять в подобном режиме роботом-аватаром? Кто-нибудь добровольно из здоровых людей, будучи в здравом уме, согласиться на вскрытие черепной коробки? При том, что подобное хирургическое вмешательство не гарантирует на 100% успеха. И вполне возможно, что после подобных экспериментов человек-оператор окажется парализованным на всю оставшуюся жизнь. Добровольцы есть? Может быть Вы, Сергей?
Ещё одно примечание: при такой крепкой связке «сенсоры робота – мозг человека» возрастает вероятность сценария, обыгранного в фильме Суррогаты. Я имею ввиду именно тот момент, когда с уничтожением суррогата погибал и человек-оператор, управляющий роботом.
А если в аппаратуре (поставляемой из любимого нами Китая) возникнет короткое замыкание – мозг человека-оператора может поджариться и без всяких военных действий!
Короче, подобный метод управления антропоморфным роботом теоретически возможен, но опять же технически очень сложен в реализации. Хотя для инвалидов, у которых разрушен спинной мозг, развитие этого научного направления имеет безусловные перспективы, но для осуществления управления роботами здоровыми людьми едва-ли.
Остаётся один единственный третий вариант дистанционного управления антропоморфными роботами – копирующий режим с помощью специального (внешнего) костюма типа экзоскелетон.
По-видимому этот вариант и будет реализован на практике. Японцы, например, своим роботом Telesar V управляют именно так, RUSANDROID тоже (перчатка из пластмассовых колец, да и в кадрах, где ноги, элемент экзоскелета промелькнул), наверняка и DARPA своим аватаром-петманом будет управлять подобным же образом. (А разговоры про обезьян с вживлёнными в башку электродами-гвоздями для того, что бы дезинформировать потенциальных конкурентов, выиграть время: типа – пока конкуренты-лохи будут пытаться развивать это направление, догоняя нас, мы быстренько слепим аватара и раструбим на весь мир о своём очередном крупном научном прорыве. И тогда можно будет кинуть клич: Налогоплатильщик, даёшь денег DARPA!!! Ну, а потом, уже имея деньги и актив в виде реального аватара, можно будет и с вживлением электродов в мозги инвалидов спокойно разобраться. Политика, понимаешь…)
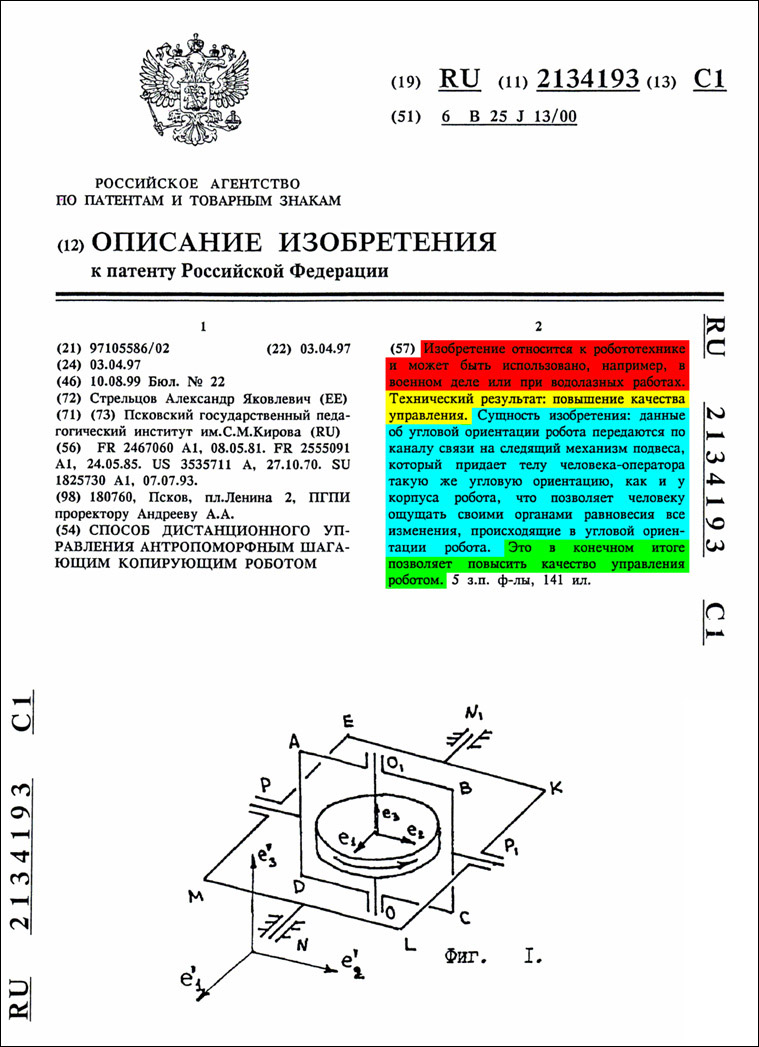
Только здесь в соответствии с третьим способом для управления роботом придётся использовать принципы, описанные в моём изобретении: патент № 2134193 Ru. Вы уж, Сергей, потерпите, не режьте мой комментарий – у нас все-таки ОТКРЫТЫЙ ФОРУМ, каждый имеет право высказать своё мнение в вежливой форме (что я и делаю) не посылать же мне этот комментарий всем участникам форума в личку. Так вот как я уже писал, что чувство равновесия очень важное, «датчики» органов равновесия возникли миллионы лет назад ещё у простейших. И вот, что бы не вскрывая черепную коробку человека-оператора, управлять роботом придётся использовать такой механизм управления:
Для Duhas, который у меня как-то спрашивал «мб ещеи бостонцы тоже перепишут?» http://roboforum.ru/forum7/topic10647-90.html?style=8 , сообщаю: может не буквально, но есть вероятность что перепишут, или разработают что-то аналогичное самостоятельно. Или Вы, уважаемый Duhas, можете предложить иной способ обратной связи по угловой ориентации корпуса робота-аватара с человеком-оператором без подключения проводов к мозгам? Только, пожалуйста, уважаемый Duhas, не делайте ссылок на этот видеоролик: . Во-первых, это устройство занимает места гораздо больше чем предложенный мной механизм управления. А во-вторых, представьте, что робот-аватар совершает «кувырок вперед» при этом у робота слегка раздвинуты ноги … представляете как человек-оператор пахом (будем писать культурно) ударится о стойку промышленного манипулятора!!!
Короче, я полагаю, что моё изобретение http://deepdivertech.narod.ru/rd.htm как раз и является «ключом» к решению проблемы. А то, что в нем идет речь о водолазах, ну так это одно из возможных применений. В своё время в 90-тых годах шел разговор и о применении на поле боя, только я быстро сообразил, что могут не дать патент – я ведь на тот момент в Эстонии проживал. Вот и ограничился водолазами, не акцентируя особенно на военном применении. Вот, кстати, первый лист описания патента:
Обратите внимание на красном фоне: «Изобретение может быть использовано в военном деле»
Так что DARPA с аватаром и с « разработкой интерфейсов и алгоритмов, позволяющих солдатам эффективно взаимодействовать с полуавтономными двуногими машинами, своеобразными суррогатными кибербойцами, которые заменят людей на самых опасных участках» подзадержалась.
Убедительная просьба к Сергею: не режьте мой коммент - народу будет интересно. Вы ведь, Сергей, порезали не только мой коммент, но и комменты тех, кто уже заглянул на форум после меня, а это уже неуважение не только ко мне.
Последний раз редактировалось Aleks 25 мар 2012, 15:29, всего редактировалось 1 раз.
дорогой писатель, а вы уверены в необходимости полной обратной связи от робота-аватара к оператору? зачем? ГПФ такой системы выполнять полезную работу.. а не развлекать экстримала оператора кувырками в разные стороны..
вы либо по-детски максималистски подходите к вопросу, либо тупо троллите..
Не понял вопроса. Что Вы подразумеваете пот аббривиатурой "ОС" - "обратную связь" или "операционную систему"?
Если Вы подразумеваете обратную связь, то отвечаю: оператор должен ощущать положение конечностей управляемого им робота (проприоцепция) - это достигается применением активного экзоскелетона, т.е. экзоскелета с "мышцами". Причем мощность мышц не обязательно должна быть большой, как у Райтхеоновского экзоскелета - мы ведь с помощью управляющего экзоскелета не тяжести собираемся поднимать, а только дать возможность человеку-оператору ощущать обстановку, окружающую робота (создание чувства веса, ощущения формы предметов, прикосновений...).
Ну, а механизм подвеса необходим, что бы придать человеку-оператору необходимый наклон тела, такой же как у робота. Видео от робота оператор получает на шлем VR - это уже стандартное оборудование.
При необходимости "мышцы" управляющего экзоскелета могут притормаживать движения человека-оператора, так что бы он не двигался существенно быстрее робота. Вообще, я до того как разрабатывать механизм подвеса, в самом начале 90-тых, изобретал копирующие манипуляторы (на тот момент я в электронике немного разбирался, паял простые схемки, но в области робототехники был дилетантом и не знал, что подобные устройства уже давно изобретены). В результате этих моих интеллектуальных изысканий получилось, что для управления копирующими манипуляторами можно использовать шифратор, не помню, кажется с 32 выходами. А потом я понял, что это не самое главное (создать копирующие манипуляторы на такая уж и большая проблема) и переключился на механизм подвеса. Уже после подачи в 1997 г. заявки в Роспатент посмотрел фильм "Газонокосильщик" в очень хреновом качестве (не мог точно рассмотреть, что там за виртуальная клетка) поэтому офигенно переживал, что не выдадут патент. Сейчас сравниваю механизм подвеса в "Газонокосильщике" и в моём патенте – вижу, что есть одинаковые элементы, но всё-таки имеются и существенные различия. Поэтому, если судить объективно, то патент выдан заслуженно - я в этом вопросе вообще без комплексов, если бы была "патентная рыбалка" - я бы так и сказал: "Да, патентная рыбалка! Ну, и что?" У меня, кстати, есть действительно нечто похожее на патентную рыбалку, см., например, в Интернете по запросу "Комнатня сверхпроводимость" - способ Стрельцова ... - там с моей стороны приложены минимальные интеллектуальные усилия. Можно сказать, что "рыбалка". – Ну и что? Пусть рыбалка! Но до меня же до этого никто не додумался! (Как говорится: "Рыбалка, не рыбалка, патентный тролль, не патентный тролль, какая разница - деньги на бочку! )
А здесь, с роботом, всё "по чесноку" – настоящее изобретение.

 .
.



 Но до меня же до этого никто не додумался! (Как говорится: "Рыбалка, не рыбалка, патентный тролль, не патентный тролль, какая разница - деньги на бочку!
Но до меня же до этого никто не додумался! (Как говорится: "Рыбалка, не рыбалка, патентный тролль, не патентный тролль, какая разница - деньги на бочку!