Томас Эдисон » 10 июн 2023, 08:51
Томас Эдисон » 10 июн 2023, 08:51
Я милитарист проектом аватара-терминатора душевно травмировал нежные души пацифистов? Только про цветочки, природу и милых котиков?
Костюм телеприсутствия – универсальный симулятор домашнего обучения летчиков, танкистов, снайперов, пулеметчиков, солдат рукопашному бою, эскаваторщиков, сварщиков, фрезеровщиков, шлифовщиков... Костюм телеприсутствия научит парашютистов управлять телом в падении: по положению рук, ног софт вычислит параметры вращения парашютиста.
Костюм телеприсутствия дает 100% всех информационных каналов оператору телеуправления наземными воздушными и подводными дронами, экскаваторами, бульдозерами, любой техникой. Оператор управляет любой техникой с виртуальных органов (пультов) управления, неотличимых в работе от реальных органов управления.
Роботами-аватарами пожарные будут тушить пожары. Андроиды-шахтеры.
Домашними детскими куклами-андроидами всех размеров через интернет будут управлять платные актрисы, актеры.
Поисковик найдет аватар-работника в радиусе до 6000км, запись работы регистратором. Аватар-работник не тратит топливо поездок на работу, с работы – расход топлива государством уменьшится в 10 раз.
ОХРАНА АВТОНОМНЫХ ТАНКЕРОВ, КОНТЕЙНЕРОВОЗОВ – напали пираты – по узконаправленным лучам спутников связи ближайшее по курсу корабля агентство охраны получит временный пароль входа на корабль. Через костюмы телеприсутствия агентство оживит андроидов-солдат.
По зашифрованному сигналу обратной связи андроиды откроют изнутри сейфы для андроидов. Андроиды перестреляют с автоматов, гранатометов всех пиратов.
Автомат сопровождения цели на экране, с передачей метки цели с точным временем кадра, обеспечит высокую точность выстрелов даже с большой задержкой сигнала. Искусственный интеллект андроида прокрутит кадры назад для покадрового распознавания и сопровождения метки на цели. После боя андроиды снова зайдут в сейфы, закроют их изнутри.
Сигнал – аватар-оператор
АНДРОИДНОЙ ОХРАНЫ ЖИЛИЩ домашним андроидом прикуёт вора наручниками к трубе до приезда полиции.
Домашний костюм телеприсутствия 2 человека соберут дома за 20 минут с деталей проходящих через стандартную дверь. Все настройки под тело человека за 3 секунды делает софт.
Костюм телеприсутствия для человека ростом до 1,82м: высота 2,42м. длина 2,42м. ширина 2,42м.
Костюм телеприсутствия для детей ростом до 1,6м: высота 1,9м. длина 1,9м. ширина 1,9м. Конструкция костюма телеприсутствия позволяет ногами чисто делать продольный, поперечный шпагат.
ЭПИДЕМИИ
Специалисты в образе андроидов будут работать в лабораториях, больницах городов (окружены армией) с смертельной эпидемией. Без костюма телеприсутствия бактериологическое оружие уничтожит государство.
МИКРОАНДРОИД-ХИРУРГ высотой 3мм изготовлен с материалов с высокой жесткостью, твердостью: сплав иридия, кубический нитрид бора, карбид бора, бор, алмаз. Хвост андроида – длинная позолоченная нить – антенна двухсторонней обратной связи и одновременно бесконтактная зарядка.
ЭНЕРГОСНАБЖЕНИЕ МИКРОАНДРОИДА:
1. тонким длинным скользким кабелем идущим с копчика андроида
2. рентгеновскими лучами
3. терагерцовыми лучами
4. ультразвуком
ПЕРЕМЕЩЕНИЕ МИКРОАНДРОИДА В КРОВЕНОСНЫХ СОСУДАХ:
1. микроандроида перемещает сфокусированное в перемещаемой точке несимметричное (крутой передний фронт, пологий задний фронт полупериода колебания) по графику электромагнитное поле, снабжающее энергией
2. сфокусированное несимметричное (крутой передний фронт, пологий задний фронт полупериода колебания) электромагнитное или ультразвуковое поле перемещает (снабжает энергией) микроандроида. Он саблей удалит тромб, раковую опухоль; стволовыми клетками вылечит разорванные нервные волокна сломанного позвоночника.
Человек садится в костюм телеприсутствия. Приводы зажимов зажимают руки, ноги, туловище человека.
Привод шлема по двум трубам-направляющим на голову опускает
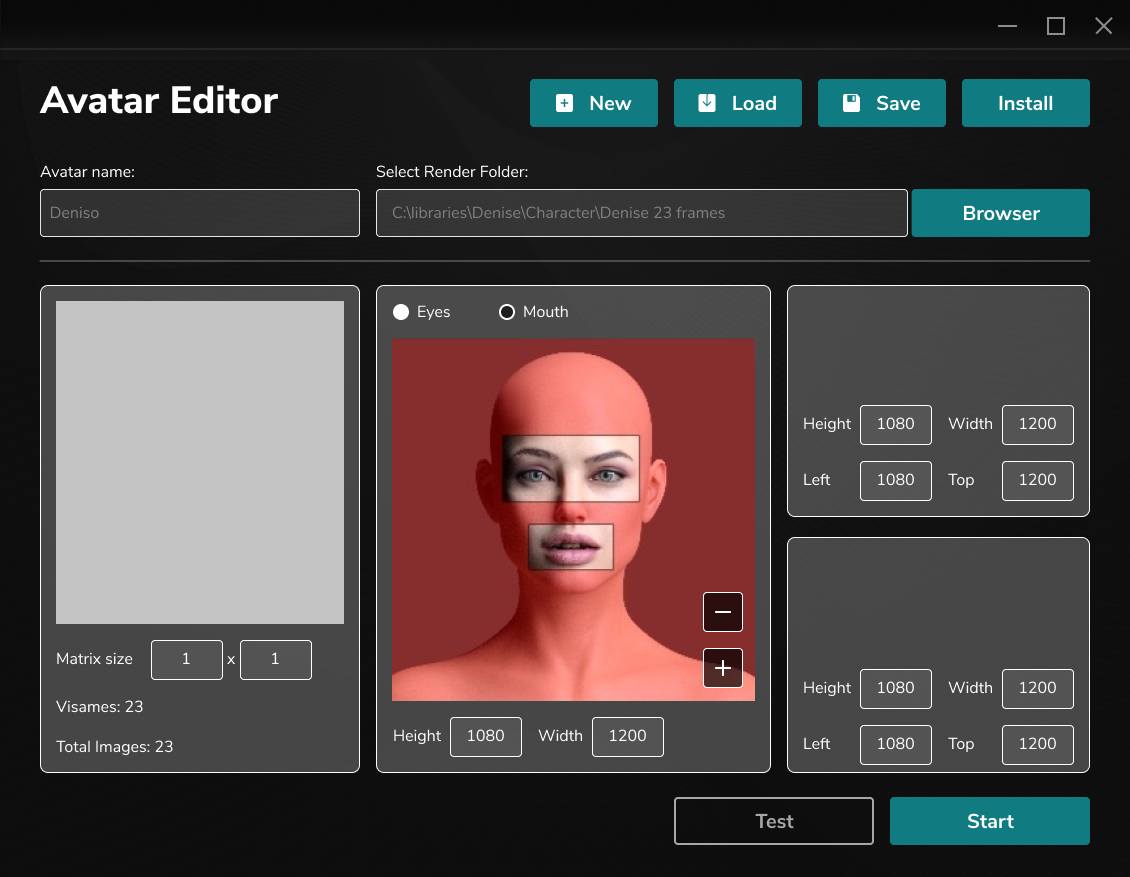
ШЛЕМ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ, фиксируя в зажимной раме туловища, чтобы убрать 2 датчика угла ориентации головы, не гнать 150кадр/сек только из-за движений головы. За полупрозрачным сферическим 3D-экраном с вырезами для плеч, невидимо человеку-1 32 телекамеры обратной связи дают человеку-2 в удаленном костюме-2 телеприсутствия 3D-картинку лица человека-1 в костюме-1 телеприсутствия.
Каждая телекамера показывает квадратный фрагмент лица, сферические искажения компенсирует софт. Границы квадратов калибруют временно включаемой прямоугольной световой сеткой на голове человека. Ячейки сетки в десятки раз меньше квадратного фрагмента.
У телекамер лампы подсветки отраженным от матового экрана рассеянным светом. Ракурсы, тип подсветки лица в шлеме, изменение цвета, яркости каждой светодиодной лампы – сценарии софта. 3D-экран с разверткой 120-180Гц, телекамеры обратной связи, лампы работают импульсно раздельно в времени не мешая друг другу.
Радиус 3D-экрана максимален ~30см: экзоскелеты рук не портят картинку. Дальше от глаз экран шлема – меньше морской болезни, тошноты от разницы «расстояние до реального объекта – до экрана».
Сферический 3D-экран по бокам сплющен на 10см чтоб выполняя работу сверху руки не задевали экран. Плотность пикселей по бокам 3D-экрана выше чем спереди.
Искажения близких объектов на картинке в экране компенсирует софт по цифрам настройки фокуса камеры.
Вариант-2: картинку в 3D-экране создают 6 лазерных проекторов с внешней или внутренней стороны экрана.
ТЕЛЕКАМЕРЫ АНДРОИДА
Лицо оператора в сферическом лицевом 3D-дисплее-голове андроида. У андроида вместо поворота головы гиростабилизированное по 2 осям переключение (по горизонтали, вертикали) ракурсных телекамер, строчек их матриц. Андроиду не надо поворачивать голову с телекамерами. На разные углы обзора у андроида 6-12 телекамер. Поворот линии взгляда синтезом кадра с строк кадров основной и дополнительных телекамер.
Это избавляет от движущихся деталей систему поворота взгляда робота, делает неподвижным половину фона кадра телекамеры робота. Неподвижный фон позволяет сильнее сжать видеосигнал и трафик от андроида без потери качества картинки.
У андроида 5 фокусных диапазонов по дальности. Разнофокусные картинки соединяет софт. На каждый фокусный диапазон 2 стереокамеры для определения оператором расстояния до объекта. Длину фокуса оператор может регулировать колесиками сзади зажимной рамы туловища или стандартными движениями головы.
Для минимума трафика видеосигнала у андроида телекамеры имеют объектив большой светосилы с сверхмалой выдержкой кадра: 7кадр/сек хватит картинке медленных движений без смазывания видео. У оператора есть колесико регулировки времени выдержки кадра телекамер андроида для уменьшения трафика видеосигнала в некоторых ситуациях.
По стереокартинке андроида его правой, левой рукой могут одновременно управлять специалисты разных профессий с 2-х костюмов телеприсутствия.
Требования к разрешению стереокамер и точности датчиков вдвое ниже, если положение рук по датчикам мозг оператора стыкует с картинкой телекамер. По калиброванному датчику андроида оператор может на 3сек включить в своем экране исходный уровень освещения картинки.
СИСТЕМА ОСВЕЩЕНИЯ В ТЕМНОТЕ
Вокруг лица андроида круг из светодиодов: двигая головой (сигнал датчиков положения головы) оператор управляет их выключением с одной стороны, устанавливая направление светотеней лучше передающее на 3D-экране форму объекта. Виртуальной системой управления оператор может установить режим вращающегося вокруг лица андроида светового пятна: по скорости роста светотеней оператор определяет форму объекта.
Режим «рассеянное освещение»: софт показывает картинку телекамер андроида, где от вращающегося светового пятна освещения сохранены только максимальные цифры яркости каждого пикселя, немного усилен градиент яркости. Оператор может выбрать ракурс и график усиления градиента яркости для рельефности картинки.
Режим «картинка без помех»: освещение фемтосекундными световыми импульсами с включением сверхскоростного оптического затвора телекамер только на время сверхкороткого возвращающегося отраженного светового импульса. Этот режим позволяет оператору в густом тумане, в мутной воде детально рассматривать объект в картинке телекамер, предварительно установив в метрах время возврата светового импульса.
Вариант-2: у пленоптических (матрица линз: фокусирует софт) телекамер андроида софт фокусирует сигнал на нескольких устанавливаемых оператором диапазонах глубины резкости картинки.
Для синхронизации костюмов телеприсутствия разных фирм с андроидами разных фирм:
1. в сигнале обратной связи все цифры силовой и тактильной обратной связи в процентах.
2. всемирный стандарт Базовой нулевой точки в манипуляторах (пальцев, рук, ног) с которой отсчитывают цифры угла.
3. всемирный стандарт Базовой нулевой точки для цифр силы в сигналах тактильной, силовой обратной связи. Базовая нулевая точка это часто цифра силы, которую надо превысить для получения в сигнале цифры обратной связи.
4. всемирный стандарт Базовой верхней (передней) точки максимального отклонения манипуляторов.
5. всемирный стандарт Базовой нижней (задней) точки максимального отклонения манипуляторов.
Телеуправление роботом – возможны
МОРСКАЯ БОЛЕЗНЬ, тошнота, головокружение, усталость оператора от:
1. большой скорости, амплитуды угловых колебаний ракурса картинки телекамер. Решение:
а)оптическая угловая стабилизация гироскопом ракурса телекамер робота
б)софт заменяет равномерную угловую скорость мгновенными скачками угла линии взгляда телекамер. Неподвижный фон, отсутствие угловой скорости улучшат самочувствие оператора
2. несоответствия расстояния «глаз – объект в реале» расстоянию «глаз – экран шлема». Решение: экран в шлеме подальше от глаз оператора.
ИНТЕРНЕТ-ТРАФИК КОСТЮМА ТЕЛЕПРИСУТСТВИЯ:
1. общий трафик силовых, угловых каналов костюма телеприсутствия 56 кбит/с (7 Кб/с):
Каналы углов, угловых скоростей: 34 кбит/с: 12 бит на угол, 5 бит на угловую скорость с периодом дискретизации 0,02с. Углы 40 тросов по сигналам датчиков перемещения троса: 24 кбит/с на углы + 10 кбит/с на угловые скорости. Удлинение тросов под нагрузкой компенсируем таблицами решений. Больше угловая скорость экзоскелетов рук, ног – больше частота передачи угла
Каналы силы, скорости роста силы: 22 кбит/с: 6 бит на силу, 5 бит на скорость роста силы с периодом дискретизации 0,02с. Это в 40 тросах 12 кбит/с на силы + 10 кбит/с на скорости роста силы в 40 тросах
Канал гироскопа: 1,95 кбит/с: в среднем 7 бит на угол с периодом дискретизации 0,02с. Это 1,05 кбит/с на три угла кардана.
6 бит на угловую скорость с периодом дискретизации 0,02с. Это 0,9 кбит/с на 3 угловые скорости кардана.
Канал ускорений туловища по 9 каналам активной 3D-подвески: 2,3 кбит/с: 5 бит на канал датчика с периодом дискретизации 0,02с
2. Канал видео, сжатая 3D-картинка, 3D-звук: 1 Мб/с
3. Канал тактильный, обе кисти: 2,7 Мбит/с (43 Кб/с). Для работы андроида достаточно 2304 пикселя на 8 кончиков пальцев обоих кистей андроида, 3 бит на пиксель с периодом дискретизации 0,02с. На кончике пальца андроида тактильная матрица 48 х 48.
На теле человека 1млн тактильных пикселей. Тактильное разрешение пальца руки 1мм, кончика пальца 0,7мм. Порог чувствительности указательного пальца 0,2 г/мм2.
В динамических (несжимаемых) сценах
АЛГОРИТМ «РАЗРЕШЕНИЕ ЭКРАНА – ЧАСТОТА КАДРОВ» при нехватке интернет-трафика подгонит видеобаланс «РАЗРЕШЕНИЕ ЭКРАНА – ЧАСТОТА КАДРОВ» к трафику: при превышении критической пиксельной скорости перемещения в картинке линий, алгоритм увеличит частоту кадров, уменьшив разрешение. При уменьшении пиксельной скорости движения линий в картинке, алгоритм увеличит разрешение картинки, уменьшит частоту кадров.
Видеобалансом, стереобазой и буферизацией оператор управляет в виртуальной системе управления.
ЭКОНОМИЯ ТРАФИКА
Телекамеры большой светосилы, малые выдержка и битность (алгоритмы) кадра. Рука андроида подняла предмет – с трафика можно временно убрать канал силы кисти – алгоритмом стабилизации сил пальцев до появления боковой силы или больше 2% изменения вертикальной силы.
Приоритетный список тактильных участков: экономим трафик – отключим участки с большим номером, затем номера поменьше. Сжатый трафик костюма телеприсутствия 1-8 Мб/с: увеличен период дискретизации медленно меняющихся цифр, вместо расшифровки имён каналов в начале серии каналов указаны номера периода дискретизации, варианта вырезки каналов с не меняющимися цифрами.
Для костюмов телеприсутствия и виртуальной реальности сотовые сети 5G выделят сегменты минимальной задержки сигнала. Костюм телеприсутствия работает на 1-10 Мб/с в мобильном интернете с движущегося автомобиля.
КОСТЮМ ТЕЛЕПРИСУТСТВИЯ ИЗМЕНИТ ПРОТОКОЛ ИНТЕРНЕТА:
1. интернет разделят на сегменты малой, средней, большой (буферизация) двухсторонней задержки управления
2. введут функцию изменения длины пакета интернет-информации. Короткие пакеты – минимум задержки, длинные – минимум трафика
3. бессерверная обратная связь при ускорении движений укорачивает пакеты интернет-информации, уменьшает число каналов
Последний раз редактировалось
Томас Эдисон 18 июл 2023, 19:04, всего редактировалось 2 раз(а).







 Будь ваша программа в 1000 раз лучше, но без оформления (интерфейса) ей будет трудно найти выход на рынок.
Будь ваша программа в 1000 раз лучше, но без оформления (интерфейса) ей будет трудно найти выход на рынок. )
)