roboforum.ru
Технический форум по робототехнике.
Собираем робота вездехода
Re: Собираем робота вездехода
А с вашими моторами 75:1 это очень заметно? И если да то на сколько откланяются и мешают движению робота?
Re: Собираем робота вездехода
если робот для экспериментов, делайте маленького робота, здоровая дура в момент отказа программы может прибить. 75:1 это много для экспериментов, берите больше 200:1 пойдет.
Re: Собираем робота вездехода
roboil писал(а):А с вашими моторами 75:1 это очень заметно? И если да то на сколько откланяются и мешают движению робота?
визуально видно что колеса восьмирят, по разному, на одном заметней на другом не очень...
еще валы в мотор редукторах такого типа слабые и от того не всегда ровные.

но на движении робота это никак не сказывается... ездит нормально.
вы еще кривых троллейбусов с куда более дикими восьмерками на колесах не видели... а они людей возят

Добавлено спустя 1 минуту 45 секунд:
AndreiSk писал(а):если робот для экспериментов, делайте маленького робота, здоровая дура в момент отказа программы может прибить. 75:1 это много для экспериментов, берите больше 200:1 пойдет.
у меня както убегал теряя управление, сбивал стулья или врезавшись в стену карабкался по ней и переворачивался
Re: Собираем робота вездехода
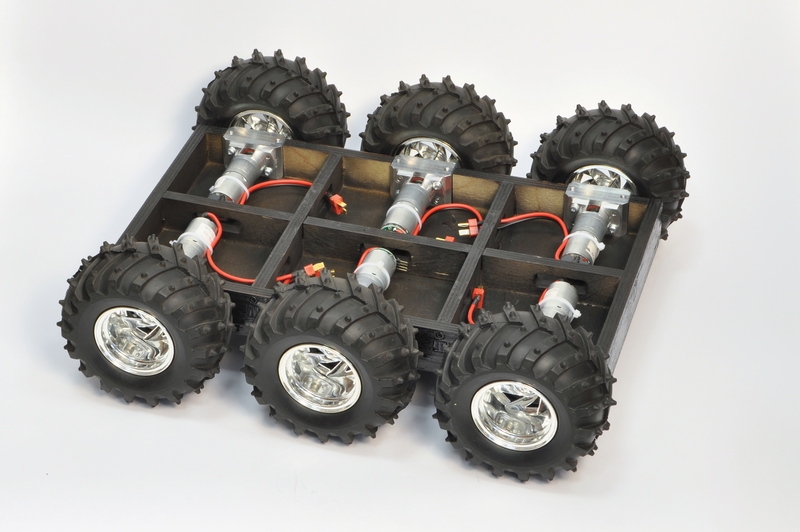
Наконец то пришли моторы крепления и колёса.(пос к ольку живу в СПб , то покупал в терраэлектронике).Кстати крепления ровные!
Вот .Немного поработал лобзиком , дрелью и отвёрткой. И получилос такое чудо!
Добавлено спустя 5 минут 43 секунды:
Четвёртый мотор придёт только завтра , а пока только так!
Добавлено спустя 1 минуту 14 секунд:
Вид спереди
Добавлено спустя 1 минуту 8 секунд:
Вид сзади
Добавлено спустя 1 минуту 10 секунд:
Вид сбоку
Добавлено спустя 3 минуты 51 секунду:
С открытой крышкой
Добавлено спустя 2 минуты 58 секунд:
Крепление колеса к мотору.
Вот .Немного поработал лобзиком , дрелью и отвёрткой. И получилос такое чудо!
Добавлено спустя 5 минут 43 секунды:
Четвёртый мотор придёт только завтра , а пока только так!
Добавлено спустя 1 минуту 14 секунд:
Вид спереди
Добавлено спустя 1 минуту 8 секунд:
Вид сзади
Добавлено спустя 1 минуту 10 секунд:
Вид сбоку
Добавлено спустя 3 минуты 51 секунду:
С открытой крышкой
Добавлено спустя 2 минуты 58 секунд:
Крепление колеса к мотору.
- Вложения
-
-
-
-
-
-
Re: Собираем робота вездехода
на вид прикольно, но имхо ненадежно, без амортизаторов будет сильно трясти, болты будут раскручиваться, камера трястись... и фанера может со временем искривляться. про синюю изоленту это я так понял временное решение...
но всетаки подумайте над более надежным, метал. решением...
но всетаки подумайте над более надежным, метал. решением...
Re: Собираем робота вездехода
Это пробная версия. Потом планирую сделать с алюминевыми уголками.
Завтра буду проверять на внедорожье! Видио выложу во вторник.
Завтра буду проверять на внедорожье! Видио выложу во вторник.
Re: Собираем робота вездехода
проходимость будет хорошая, единственное в траве и на густых коврах будут проблемы...
Re: Собираем робота вездехода
Насчёт проходимости!
Видео выложу вечером. Причём там у робота только три колеса и при этом хорошая проходимость даже на траве!
Видео выложу вечером. Причём там у робота только три колеса и при этом хорошая проходимость даже на траве!
Re: Собираем робота вездехода
roboil писал(а):хорошая проходимость даже на траве!
трава траве рознь...
если короткая то без проблем, но если длинная и начнет наматывать на колеса - то все приехали

и еще поделюсь бесценным опытом!
в траве бывают какашки...  а данный тип колес очень тяжело мыть из за протектора и шипов... так что особо в ней не разгоняйтесь
а данный тип колес очень тяжело мыть из за протектора и шипов... так что особо в ней не разгоняйтесь 
п.с. вам бы все таки рессоры какие то...
без них на таких вот мячиках ваш к\агрегат перевернется, да и по мелким кочкам трясти будет.
Re: Собираем робота вездехода
А если можно? Выложите пожалуйста фотку с системой рессоров у вашего Wild Thumper .
Re: Собираем робота вездехода
вот самодельный аналог
http://letsmakerobots.com/content/make- ... -your-bots
еще посмотрите тут
http://forum.rcdesign.ru/f73/thread275724.html
интересный проект http://forum.rcdesign.ru/f108/thread296304-2.html
Добавлено спустя 1 час 44 минуты 51 секунду:
нашел клевую тему! очень интересное там решение!
http://habrahabr.ru/post/175889/
правда убрав недостатки блатформы, они убили ее основной плюс - это отличную подвеску.
а без амортизаторов это просто тарантайка...
http://letsmakerobots.com/content/make- ... -your-bots
еще посмотрите тут
http://forum.rcdesign.ru/f73/thread275724.html
интересный проект http://forum.rcdesign.ru/f108/thread296304-2.html
Добавлено спустя 1 час 44 минуты 51 секунду:
нашел клевую тему! очень интересное там решение!
http://habrahabr.ru/post/175889/
правда убрав недостатки блатформы, они убили ее основной плюс - это отличную подвеску.
а без амортизаторов это просто тарантайка...
Re: Собираем робота вездехода
Angel71 писал(а):если вы про пультики от rc моделей, то они интересны в основном для тех, кто не собирается программировать
Никакой связи.
Пультики от RC моделей интересны для тех, кто хочет удобное и эргономичное управление.
Программировать или нет - это уже дело десятое. на любом МК или ардуине данные с модельного приемника элементарно обрабатываются и получается удобное пропорциональное многоканальное управление, а не изврат в виде дискретных самодельных пультов или такого-же неудобного управления через сенсорный экран смартфона. Плюс дальность пультов rc-моделей сотни метров или даже километры, в отличие от wifi|bluetooth. Столько конечно не надо, но это дает надежное управление через несколько бетонных стен.
Re: Собираем робота вездехода
нашел интересную тему!
http://letsmakerobots.com/blog/oddbot/building-a-titan
http://letsmakerobots.com/robot/project/titan
это сравнение колес


http://letsmakerobots.com/blog/oddbot/building-a-titan
http://letsmakerobots.com/robot/project/titan
это сравнение колес
Re: Собираем робота вездехода
Классная тачилла. Доделаю на участке мастерскую и начну такой-же проект, что-то типа бюджетного электро квадрацикла с 6-ю колесами (начну с 3-4), чтоб спокойно тащил 200-300 кг. Бюджет думаю 60-100кр. Но гемора будет много. моторы/редукторы/подвеска - вот 3 проблемы. Мощные моторы можно найти только высокооборотные, редукторы дешевые только ременные, независимая подвеска колес с ременными редукторами это ужас.
Re: Собираем робота вездехода
а если купить квадроцикл, тот же детский, новый стои 30к новый, бу видел за 15к, дешевле чем сейчас шасси моего робота. но громоздкое это, все, хранить негде.
но основная проблема это место хранения, не у всех оно есть...
насчет редукторов и коробки передач, может делать на заказ? по своим чертежам?
на мой взгляд основная проблема роботов с мотор редуктопрами на каждом колесе это отсутствие коробки передач, все регулируется только шим... а куда лучше иметь 2-3 передачи в редукторе.
но основная проблема это место хранения, не у всех оно есть...
насчет редукторов и коробки передач, может делать на заказ? по своим чертежам?
на мой взгляд основная проблема роботов с мотор редуктопрами на каждом колесе это отсутствие коробки передач, все регулируется только шим... а куда лучше иметь 2-3 передачи в редукторе.