avr123.nm.ru писал(а):
Надо почитать инструкцию, возможно демо прошивка свободно опубликована производителем. Есть Trex и на сайте SparkFun.com
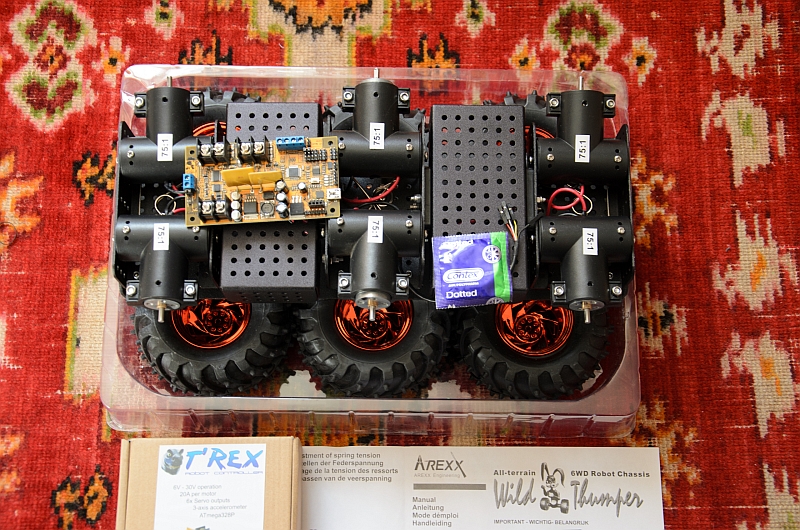
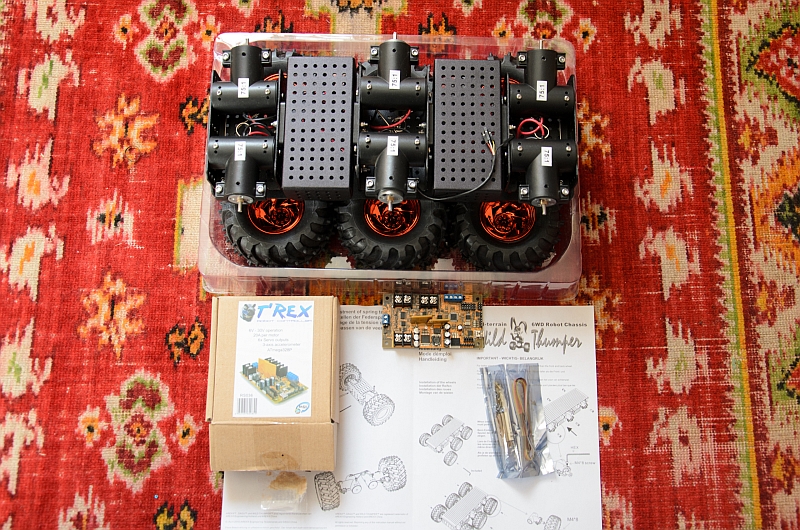
ВНИМАНИЕ! Контроллер для роботов TREX ИМХО великолепен! и стоит своих денег на 150 % - вот краткое описание:
TREX DAGU робоконтроллер 110х60 мм. ATmega328P-AU, cp2102 usb-uart, 2 шт. Н-мосты предрайверы A4940KLPT (перед ними похоже МК ssop14 HC082R1R003uxd13) и мощные полевики SUB85N03-04P D2PAK, датчики тока ACS712T от моста на землю. На плате стабилизатор LM1084 и LM2576S (дроссель 100 мкГн), входн. конд. 3 шт. х 47 мкФ на 35 вольт, термопредохранители в питание Н-мостов пазмер 23х23 мм маркировка 30 UF900, защита силовая от переполюсовки на полевике SUM110P04-05, все полевики расположены в ряд, можно добавить радиатор через пасут либо на шасси поставить, мин. площадка теплоотвода 85х15 мм.
да там есть какие то прошивки
https://cdn.sparkfun.com/datasheets/Robotics/TREX_controller_rev.zipя их еще до покупки скачивал, читал

вот только я пока непонимаю они все сразу залиты в плату или их заливают по надобности?
вот пример того что там есть
вот еще такое нашел
вот к примеру что было в файле блютус:
Код:
void Bluetooth()
{
//============================================================= Bluetooth Control ===================================================
static byte d,e; // data and error bytes
if(Serial.available()>2) // Command is 3 bytes in length
{
d=Serial.read(); // read byte from buffer
if(d!=startbyte) // if byte is not a start byte (0x0F)
{
lmspeed=0; // bad data received
rmspeed=0; // set motor speeds to 0
e=0; // error flag reset
}
else
{
lmspeed=(int(Serial.read())-127)*2-1; // good data received
rmspeed=(int(Serial.read())-127)*2-1; // read values for left and right motors
}
}
else // less than 3 bytes in buffer
{
e++; // count program loops with less than 3 bytes in buffer
if(e>100) // assume lost signal if buffer less than 3 bytes for too long
{
lmspeed=0; // stop left motor
rmspeed=0; // stop right motor
e=0; // reset error counter
}
}
Motors(); // update motors
}
void BluetoothConfig() // This code intended for a DAGU bluetooth module - may not work with other brands
{
long baud[]={9600,115200,57600,38400,19200,4800,2400,1200}; // try 9600 first as this is default setting then try other baud rates
byte br=0,d;
while(mode==0 && br<8) // scan through different baud rates and attempt to configure bluetooth module
{
Serial.begin(baud[br]); // enable T'REX serial at baud rate baud[br]
Serial.print("AT"); // send "AT" to see if bluetooth module is connected
delay(1500); // wait for bluetooth module to respond
if(Serial.available()>1) // after 1 second the bluetooth module should respond
{
byte i=Serial.read(); // should be 79 "O"
byte j=Serial.read(); // should be 75 "K"
if(i==79 && j==75) // if response is "OK" then cofigure bluetooth module
{
EmptyBuffer(); // clear buffer
Serial.print("AT+NAMET'REX"); // ensure name is set to "T'REX"
delay(1500); // wait for bluetooth module to respond
EmptyBuffer(); // clear buffer
Serial.print("AT+PIN1234"); // ensure PIN is set to "1234"
delay(1500); // wait for bluetooth module to respond
EmptyBuffer(); // clear buffer
if(br!=0) // if bluetooth baud rate was not 9600
{
Serial.print("AT+BAUD4"); // set bluetooth baud rate to 9600
delay(1500); // wait for bluetooth module to respond
EmptyBuffer(); // clear buffer
Serial.end(); // close serial communications at current baud rate
Serial.begin(9600); // set T'REX controller serial communications to 9600
}
mode=2; // bluetooth module successfully detected and configured - change to bluetooth mode
}
}
if(mode==0) // bad response - bluetooth module not communicating at current baud rate
{
EmptyBuffer();
Serial.end(); // close serial communications at this baud rate
br++; // prepare to try next baud rate
}
}
}
void EmptyBuffer()
{
byte b;
while(Serial.available()) // empty buffer once response is received
{
b=Serial.read();
}
}
//=============================================================== Bluetooth AT+ commands ===========================================
/*
--------- Test Communications --------
Send: AT Receive: OK
---------- Change Baud Rate ----------
Send: AT+BAUD1 Receive: OK1200
Send: AT+BAUD2 Receive: OK2400
Send: AT+BAUD3 Receive: OK4800
Send: AT+BAUD4 Receive: OK9600
Send: AT+BAUD5 Receive: OK19200
Send: AT+BAUD6 Receive: OK38400
Send: AT+BAUD7 Receive: OK57600
Send: AT+BAUD8 Receive: OK115200
------------ Change Name -------------
Send: AT+NAMEname Receive: OKsetname
--------- Change Pairing Code --------
Send: AT+PIN1234 Receive: OKsetpin
а вот какойто мастер сенд...
Код:
void MasterSend(byte sbyte, byte pfreq, int lspeed, byte lbrake, int rspeed, byte rbrake, int sv0, int sv1, int sv2, int sv3, int sv4, int sv5, byte dev,int sens,int lowbat, byte i2caddr,byte i2cfreq)
{
Wire.beginTransmission(I2Caddress); // transmit data to 7
Wire.write(startbyte); // start byte
Wire.write(pfreq); // pwm frequency
Wire.write(highByte(lspeed)); // MSB left motor speed
Wire.write( lowByte(lspeed)); // LSB left motor speed
Wire.write(lbrake); // left motor brake
Wire.write(highByte(rspeed)); // MSB right motor speed
Wire.write( lowByte(rspeed)); // LSB right motor speed
Wire.write(rbrake); // right motor brake
Wire.write(highByte(sv0)); // MSB servo 0
Wire.write( lowByte(sv0)); // LSB servo 0
Wire.write(highByte(sv1)); // MSB servo 1
Wire.write( lowByte(sv1)); // LSB servo 1
Wire.write(highByte(sv2)); // MSB servo 2
Wire.write( lowByte(sv2)); // LSB servo 2
Wire.write(highByte(sv3)); // MSB servo 3
Wire.write( lowByte(sv3)); // LSB servo 3
Wire.write(highByte(sv4)); // MSB servo 4
Wire.write( lowByte(sv4)); // LSB servo 4
Wire.write(highByte(sv5)); // MSB servo 5
Wire.write( lowByte(sv5)); // LSB servo 5
Wire.write(dev); // devibrate
Wire.write(highByte(sens)); // MSB impact sensitivity
Wire.write( lowByte(sens)); // LSB impact sensitivity
Wire.write(highByte(lowbat)); // MSB low battery voltage 550 to 30000 = 5.5V to 30V
Wire.write( lowByte(lowbat)); // LSB low battery voltage
Wire.write(i2caddr); // I2C slave address for T'REX controller
Wire.write(i2cfreq); // I2C clock frequency: 0=100kHz 1=400kHz
Wire.endTransmission(); // stop transmitting
Serial.println("Master Command Data Packet Sent");
//-------------------------------- Make sure Master and Slave I2C clock the same ------------------------------------------------
if(i2cfreq==0) // thanks to Nick Gammon: http://gammon.com.au/i2c
{
TWBR=72; // default I²C clock is 100kHz
}
else
{
TWBR=12; // changes the I²C clock to 400kHz
}
}
в гугле меня не банили, про ардуины читал, про то как их програмят тоже читал.
но в моем случае не совсем ардуино, а спецефическая штука совмещающая в себе драйвер моторов и ардуинонано. как понять что с нем стоит делать а что нет? я почемуто думал что можно програмно прочитать прошивку в плате и сохранить как резерв... а выходит нужен какой то программатор и танцы с бубном )))



















 а так дело ваше.
а так дело ваше.