 ). Но окучивать новые чипы, как это делал 10 лет назад - не готов, нужна халява...
). Но окучивать новые чипы, как это делал 10 лет назад - не готов, нужна халява...| |
roboforum.ruТехнический форум по робототехнике. |
|
Электротранспорт, Razor E300
Re: Электротранспорт, Razor E300
![]() Dmitry__ » 12 ноя 2017, 00:31
Dmitry__ » 12 ноя 2017, 00:31
Ну я не просто потянулся на стм32, а делаю довольно серьезные проекты на нем (хвастаца? ). Но окучивать новые чипы, как это делал 10 лет назад - не готов, нужна халява...
). Но окучивать новые чипы, как это делал 10 лет назад - не готов, нужна халява...-

Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Электротранспорт, Razor E300
![]() Dmitry__ » 12 ноя 2017, 20:38
Dmitry__ » 12 ноя 2017, 20:38
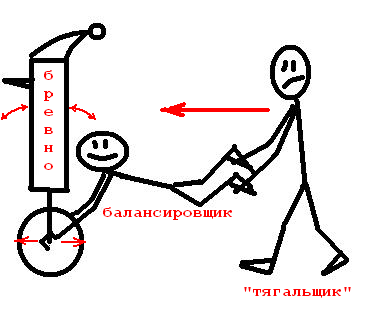
Капец, на форуме электротранспорт, доказываю людям что на моноколесе тратится энергия на балансировку наездника, не верят, заминусовали меня ниже плинтуса. Братцы! Это заговор! Вы меня убедили, что 99% населения Земли - идиоты 
Фееричный бред:
Добавлено спустя 11 минут 58 секунд:
Умру щаз от смеха, цирк, война и немцы
Добавлено спустя 18 минут 10 секунд:
Меня убьют на форуме электротранспорт, я эту картинку сделал себе аватаркой
Фееричный бред:
Если друг будет толкать бревно в плечо, то на выключенном колесе упадет, т.к. ускорение в верхней точке будет больше, чем в нижней. Если друг будет не в плечо толкать, а тянуть за веревку, один конец которой закреплен на "плече", а другой на самом колесе - бревно тоже не упадет, т.к. ускорение верхней и нижней части будет одинаковым.
Добавлено спустя 11 минут 58 секунд:
Умру щаз от смеха, цирк, война и немцы
Добавлено спустя 18 минут 10 секунд:
Меня убьют на форуме электротранспорт, я эту картинку сделал себе аватаркой
-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Электротранспорт, Razor E300
![]() Madf » 13 ноя 2017, 12:47
Madf » 13 ноя 2017, 12:47
Стань первым, кто наберёт больше всего МИНУСОВ!
Кстати, черепахи святые животные...
Кстати, черепахи святые животные...
- Madf
- Сообщения: 3298
- Зарегистрирован: 03 янв 2012, 12:55
- Откуда: Москва
- прог. языки: VB6, BASCOM, ASM...
Re: Электротранспорт, Razor E300
![]() Dmitry__ » 16 ноя 2017, 01:32
Dmitry__ » 16 ноя 2017, 01:32
Братцы! Спалили меня ламерюгу на электротранспорт.ру, пля, как теперь жить? 
http://electrotransport.ru/ussr/index.php?topic=22939.msg1218160#msg1218160
http://electrotransport.ru/ussr/index.php?topic=22939.msg1218160#msg1218160
Ну уж не знаю, отчего оно крутиться. Но айтишную кухню знаю хорошо. И в отличии от обывательских представлений о программерах как о злобных и некоммуникабельных интровертах точно знаю, что без навыка в сжатое время передавать большой обьем сложной технической информации работа в команде разработчиков невозможна. Среднее количество переписки у участника проекта может превышать 20-30 писем.
Ну и постоянное писание кода (пусть и на ЯП) накладывает отпечаток на стиль изложения.
Dmitry__, вы уже тут месяц толкаете идею , которая кроме смеха ни у кого не вызывает.
Айтишные HR таких персонажей распознают за версту и не подпускают к серьезным проектам
-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Электротранспорт, Razor E300
![]() ilalexey » 16 ноя 2017, 01:41
ilalexey » 16 ноя 2017, 01:41
Dmitry__ писал(а):как теперь жить?
как большинство: неделю помучаешься, а потом будешь горд отскребанию какашек.
Зато посмотри, каким важным дядька стал.. подкормил ты его
-

ilalexey - Сообщения: 3202
- Зарегистрирован: 13 май 2011, 21:37
- Откуда: Bb
Re: Электротранспорт, Razor E300
![]() Dmitry__ » 16 ноя 2017, 01:55
Dmitry__ » 16 ноя 2017, 01:55
ilalexey писал(а):Зато посмотри, каким важным дядька стал.. подкормил ты его
Кстати да, заметил, что кто на том форуме ставит свои фотки в аватарку - самовлюбленные индюки с iq 1. У них наверно у всех длинные селфи палки, они катаются на колесах и снимают себя любимых
Добавлено спустя 1 минуту 16 секунд:
Обидно другое, что таких как я раскусывают за 30 сообщений и к серьезным проектам не пускают, пришлось заняться пиписькомерством
Добавлено спустя 3 минуты 48 секунд:
Ой, похоже у меня скоро будет такая хрень, думаю в этот раз меня жена точно выгонит из дома

-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Электротранспорт, Razor E300
![]() Madf » 16 ноя 2017, 18:02
Madf » 16 ноя 2017, 18:02
Не имеет смысла обижаться на кренделей с "Сообщений: 127".
- Madf
- Сообщения: 3298
- Зарегистрирован: 03 янв 2012, 12:55
- Откуда: Москва
- прог. языки: VB6, BASCOM, ASM...
Re: Электротранспорт, Razor E300
![]() Angel71 » 16 ноя 2017, 22:23
Angel71 » 16 ноя 2017, 22:23
Dmitry__, кто за спиной стоял, когда писал сообщение?  стока фоток с деффакми, а ти...
стока фоток с деффакми, а ти...
правильно, что пинают. тя ещё стукнуть можно. парралоновой сковородкой. разочек. для профилактики. делаешь для себя, расходится с кем-то мнение, ну так делай, как считаешь нужным. ты ошибаешся или кто-то, какая разница? ты ошибался, значит у тебя штукенция корявенькая будет. они, у них. накука тебе эти миссионерские перепалки? продай им лучше свой шсамогкат, платку или ещё чего и денег на них заработай.
стока фоток с деффакми, а ти...правильно, что пинают. тя ещё стукнуть можно. парралоновой сковородкой. разочек. для профилактики. делаешь для себя, расходится с кем-то мнение, ну так делай, как считаешь нужным. ты ошибаешся или кто-то, какая разница? ты ошибался, значит у тебя штукенция корявенькая будет. они, у них. накука тебе эти миссионерские перепалки? продай им лучше свой шсамогкат, платку или ещё чего и денег на них заработай.
-

Angel71 - Сообщения: 10668
- Зарегистрирован: 18 апр 2009, 22:18
- Предупреждения: -1
Re: Электротранспорт, Razor E300
![]() Dmitry__ » 16 ноя 2017, 23:17
Dmitry__ » 16 ноя 2017, 23:17
Ничего не понял, но если что, на фото не я, я еще толще и рожа еще более рязанская, можно в нос воткнуть циркуль и обвести круг - будет моя голова 
-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Электротранспорт, Razor E300
![]() Angel71 » 17 ноя 2017, 01:49
Angel71 » 17 ноя 2017, 01:49
от вредина. не был раскрыт вопрос (.)(.)
там вроде mototec toxozers 7, тады так
сковородка это про электротранспорт.ру
там вроде mototec toxozers 7, тады так
сковородка это про электротранспорт.ру
-
Angel71 - Сообщения: 10668
- Зарегистрирован: 18 апр 2009, 22:18
- Предупреждения: -1
Re: Электротранспорт, Razor E300
![]() Dmitry__ » 17 ноя 2017, 03:08
Dmitry__ » 17 ноя 2017, 03:08
Крутяг! Не удаляй 
Теперь и эту тему ilalexey будет ассоциировать с тяпницей. Нам хана!
Теперь и эту тему ilalexey будет ассоциировать с тяпницей. Нам хана!
-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Электротранспорт, Razor E300
![]() Angel71 » 17 ноя 2017, 03:29
Angel71 » 17 ноя 2017, 03:29
только не говори ему, что в неделе 7 девушек, не то тем не напасёшся
https://pasteboard.co/GTYRePr.jpg
https://pasteboard.co/GTYRePr.jpg
{kind=link}
-
Angel71 - Сообщения: 10668
- Зарегистрирован: 18 апр 2009, 22:18
- Предупреждения: -1
Re: Электротранспорт, Razor E300
![]() linvinus » 17 ноя 2017, 22:52
linvinus » 17 ноя 2017, 22:52
>>http://electrotransport.ru/ussr/index.php?topic=22939.msg1218160#msg1218160
там нужно было разбирать тему с того почему вообще колесо (обычное не моно), едет.
думаю уже после этого было бы понятно кто что понимает.
лучше расскажи по подробнее как контроллер моно колеса устроен, синусом крутишь сразу со старта?
там нужно было разбирать тему с того почему вообще колесо (обычное не моно), едет.
думаю уже после этого было бы понятно кто что понимает.
лучше расскажи по подробнее как контроллер моно колеса устроен, синусом крутишь сразу со старта?
-

linvinus - Сообщения: 1672
- Зарегистрирован: 29 апр 2011, 12:37
- Откуда: Москва
- прог. языки: С
Re: Электротранспорт, Razor E300
![]() Dmitry__ » 17 ноя 2017, 22:59
Dmitry__ » 17 ноя 2017, 22:59
Я купил моноцикл, остановите меня
Слева ОГРОМЕННОЕ 16-ти дюймовое колесо, справа моноцикл, хз сколько дюймов
Тут: 14, 16, хз сколько
Добавлено спустя 5 минут 33 секунды:
linvinus, отвечу позже, я сейчас в афиге что все получилось с покупкой моноцикла за (внимание!) 8т.р.
Слева ОГРОМЕННОЕ 16-ти дюймовое колесо, справа моноцикл, хз сколько дюймов
Тут: 14, 16, хз сколько
Добавлено спустя 5 минут 33 секунды:
linvinus, отвечу позже, я сейчас в афиге что все получилось с покупкой моноцикла за (внимание!) 8т.р.
-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Электротранспорт, Razor E300
![]() Angel71 » 17 ноя 2017, 23:07
Angel71 » 17 ноя 2017, 23:07
Dmitry__,
вроде так
ну да, чтот дёшево. прислушайся, может люди в штатском уже в дверь стучат.
вроде так
Двигатель: 60V1000W Brushless Hub Motor
Аккумулятор: литиевая батарея 60V 22Ah
Время зарядки: 3-6 часов
Зарядное устройство: 110-240 В 50-60 Гц
Свет: передние / задние светодиодные фонари
Максимальная скорость: 20 км / ч
Максимальная нагрузка: 150 кг
Макс. Подъем: 30 °
Расстояние: 90-100 км
Рама: Полностью алюминиевое литье под давлением
Рукоятка: Мягкие удобные ручки
Колеса: 17 дюймовые
Тормоз: автоматический
N.W / G.W: 43 / 46kgs
ну да, чтот дёшево.
прислушайся, может люди в штатском уже в дверь стучат.-
Angel71 - Сообщения: 10668
- Зарегистрирован: 18 апр 2009, 22:18
- Предупреждения: -1
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0