
roboforum.ru
Технический форум по робототехнике.
Автоуровень кровати: FSR датчик касания
Re: Автоуровень кровати: FSR датчик касания
А вообще интересно - у меня при "парковке" сопло висит за пределами стола (offset 9 и 1) - нет.. не прокатит мне такой "концевик" по Z-z-z...
Re: Автоуровень кровати: FSR датчик касания
OBN_RacerMan писал(а):Для стола, думаю, так вполне достаточно три сенсора иметь - вместо трёх регулировочных винтов.
а что будет если сопло начнем тыкаться в тот угол где нет датчика? Платформы обычно прямоугольные и на 4 пружинах. Сдается мне, то как результат данные о соприкосновении в этом углу будут сильно отличаться от реальных. Как результат, будем иметь перекос. Вопрос правда насколько большой.
Myp писал(а):3 датчика подключаются на 3 входа контроллера (по факту пьезоэлементы на плате параллельно соединены, можно хоть десять подключить)
если так, то круто, можно подключать 4 датчика и не париться
Добавлено спустя 3 минуты 35 секунд:
3DPrinter писал(а):Как выбрать ложные срабатывания пока не ясно.
крутить крутилки на контроллере, регулируя усиление сигнала с пьезо элементов.
примерно как в инструкции на видео.[/quote]
Нужно тестировать, но боюсь идеально не отстроить. Лучше бы программно игнорировать данные при хоуминге. Например для хоуминга можно использовать обычный концевик, а для автокомпенсации колибровки уже датчик. Тоже костыль. Нужно тестить.
Добавлено спустя 42 секунды:
OBN_RacerMan писал(а):А вообще интересно - у меня при "парковке" сопло висит за пределами стола (offset 9 и 1) - нет.. не прокатит мне такой "концевик" по Z-z-z...
ну купите себе стекло побольше и будет вам феншуй
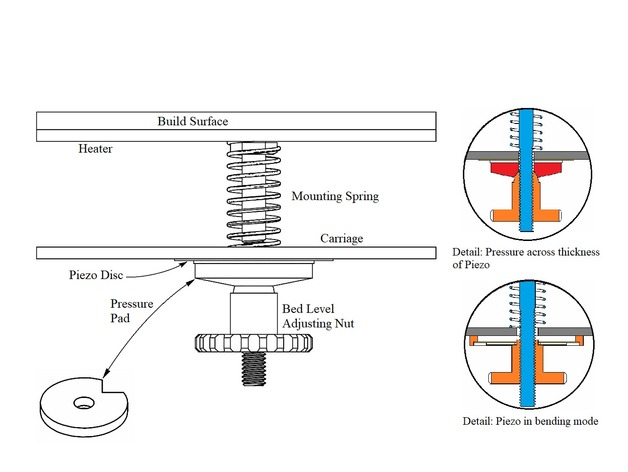
P.S. еще раз напомню, что идея размещения датчиков такая:
Re: Автоуровень кровати: FSR датчик касания
3DPrinter писал(а):Платформы обычно прямоугольные и на 4 пружинах.
ну тут у производителей нет единства...
 У меня на принтере да - на 4-х винтах, а у многих - на 3-х (и я тоже потом на три буду переделывать).
У меня на принтере да - на 4-х винтах, а у многих - на 3-х (и я тоже потом на три буду переделывать).