Собсно, сабж: https://groups.google.com/forum/#!topic ... 3lSfnCz5W4
Лично я не смог осознать как это работает, если кто сможет - буду рад если объясните )
| |
roboforum.ruТехнический форум по робототехнике. |
|
Новый подход к автоматическому выравниванию платформы
Сообщений: 27
• Страница 1 из 2 • 1, 2
Новый подход к автоматическому выравниванию платформы
![]() hudbrog » 15 апр 2014, 19:31
hudbrog » 15 апр 2014, 19:31
-

hudbrog - Сообщения: 1585
- Зарегистрирован: 14 май 2008, 15:49
- Откуда: Москва
- ФИО: Алексей
Re: Новый подход к автоматическому выравниванию платформы
![]() sagri » 15 апр 2014, 20:08
sagri » 15 апр 2014, 20:08
Что тут непонятного )))
Стол держится на 3х пружинах, 3 стойки имеют зажимной механизм. Это все управляется с помощью Gcoda который управляет выходом вентилятора (вместо вентилятора подключен двигатель)
Порядок работы
1 включаем вентилятор - двигатель вращает белый диск - он освобождает первую стойку и она свободно перемещается вверх-вниз (подпружинена)
2 перемещаем сопло на место освободившейся сойки и опускаем до Z0, сопло чуть опускает стол
3 вращаясь диск зажимает эту стойку от дальнейшего перемещения вверх-вниз
4 диск освобождает вторую стойку
5 сопло перемещаем на вторую стойку и также опускаем Z0
6 диск вращаясь зажимает вторую стойку
7 освобождаем третью стойку, опускаем сопло до Z0, зажимает третью стойку.
этот gcod надо вставлять перед каждым gcodом и при печати сначала калибруется стол, а потом происходит печать.
Стол держится на 3х пружинах, 3 стойки имеют зажимной механизм. Это все управляется с помощью Gcoda который управляет выходом вентилятора (вместо вентилятора подключен двигатель)
Порядок работы
1 включаем вентилятор - двигатель вращает белый диск - он освобождает первую стойку и она свободно перемещается вверх-вниз (подпружинена)
2 перемещаем сопло на место освободившейся сойки и опускаем до Z0, сопло чуть опускает стол
3 вращаясь диск зажимает эту стойку от дальнейшего перемещения вверх-вниз
4 диск освобождает вторую стойку
5 сопло перемещаем на вторую стойку и также опускаем Z0
6 диск вращаясь зажимает вторую стойку
7 освобождаем третью стойку, опускаем сопло до Z0, зажимает третью стойку.
этот gcod надо вставлять перед каждым gcodом и при печати сначала калибруется стол, а потом происходит печать.
- sagri
- Сообщения: 30
- Зарегистрирован: 23 мар 2014, 00:27
Re: Новый подход к автоматическому выравниванию платформы
![]() hudbrog » 16 апр 2014, 09:21
hudbrog » 16 апр 2014, 09:21
По английски я читать умею, спасибо ) Мне не понятно как работает механизм фиксации (и разфиксации) стоек, можешь нарисовать? )
-
hudbrog - Сообщения: 1585
- Зарегистрирован: 14 май 2008, 15:49
- Откуда: Москва
- ФИО: Алексей
Re: Новый подход к автоматическому выравниванию платформы
![]() sagri » 16 апр 2014, 10:13
sagri » 16 апр 2014, 10:13
Работу фиксатора можно представить как у патрона дрели. Только все из пластика - что порождает недолговечность.
- sagri
- Сообщения: 30
- Зарегистрирован: 23 мар 2014, 00:27
Re: Новый подход к автоматическому выравниванию платформы
![]() SDimok » 18 апр 2014, 08:53
SDimok » 18 апр 2014, 08:53
sagri писал(а):Работу фиксатора можно представить как у патрона дрели. Только все из пластика - что порождает недолговечность.
Вижу интересный способ организовать фиксацию.
Есть в природе быстросъемные цанговые фитинги для пневматики.
Сегодня попробовал толкнуть в него втулку по диаметру.
Втулка входит легко, а обратно не идет, люфта даже нет (прилаживал, можно сказать ОГРОМНЫЕ усилия).
Так вот, если 3 таких фитинга поставить и воткнуть на них подпружиненный стол. В стартовом Г коде поставить
парковку Z0 в каждой их 3-х точек, где стоят фитинги.
Хотэнд упрется и задвинет гвоздь(болт или на чем там будет крепиться стол)до нужного уровня внутрь фитинга, во всех трех точках крепления стола. Обратно стол отпружинить не сможет, фитинги держат намертво.
А перед следующим стартом нужно будет надавить на каждый фитинг(на фотке синяя шайба), и гвозди освободившись примут начальное положение(под действием пружин).
И все повториться сначала.
Кстати сказать трубки, вставленные в эти фитинги у нас на предприятии, под давлением около 6 кг.
Снял видео, на нем видно насколько хорошо фиксируется шестигранник. Правда всавляется он хуже гвоздя

Двигается с небольшим усилием, думаю хотэнд его продавить сможет.
- Вложения
-
- fitting.JPG (8.16 КиБ) Просмотров: 4717
-

SDimok - Сообщения: 196
- Зарегистрирован: 11 сен 2013, 01:45
- Откуда: Саянск
- прог. языки: C++
- ФИО: Дмитрий
Re: Новый подход к автоматическому выравниванию платформы
![]() karabas2011 » 19 апр 2014, 22:58
karabas2011 » 19 апр 2014, 22:58
пробовал такие - очень неудобно будет отжимать для освобождения. Оригинальный зажим удобнее. И никто не мешает его делать хоть люминя и резины. По типу велосипедных тормозов.Дикое усилие не требуется. Только чтоб кровать не просела под тяжестью детали и случайных ударов сопла по неровностям.
Добавлено спустя 4 минуты 43 секунды:
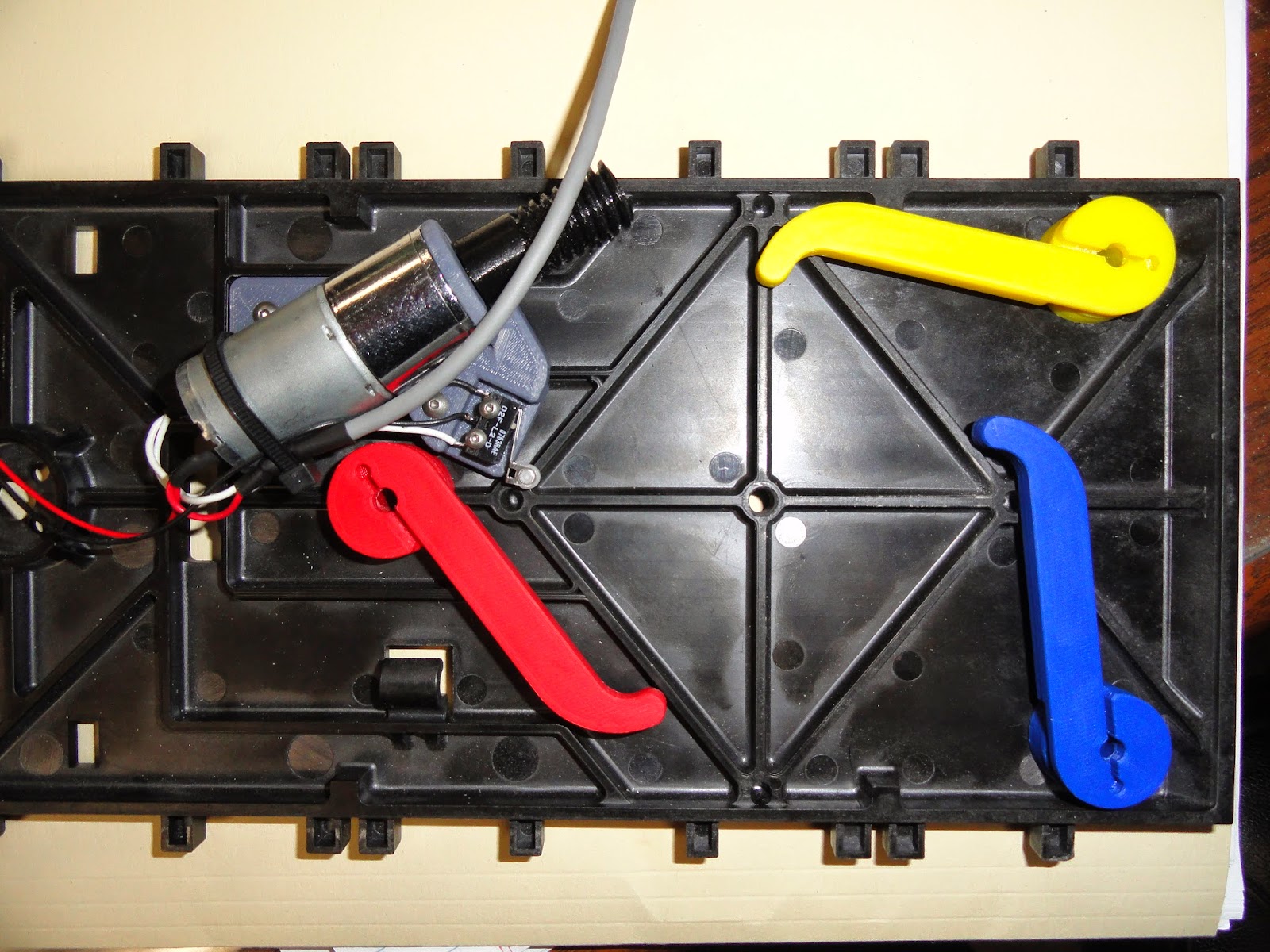
там фотка есть - три рычага это на самом деле обычные хомуты у которых одна половинка короткая и жёстко прикручена а вторая - длинная уходит под белую шестерню. Она гибкая в районе стойки. Если на неё нажать в горизонтальном направлении - она зафиксирует стойку.
Добавлено спустя 4 минуты 43 секунды:
hudbrog писал(а):Собсно, сабж: https://groups.google.com/forum/#!topic ... 3lSfnCz5W4
Лично я не смог осознать как это работает, если кто сможет - буду рад если объясните )
там фотка есть - три рычага это на самом деле обычные хомуты у которых одна половинка короткая и жёстко прикручена а вторая - длинная уходит под белую шестерню. Она гибкая в районе стойки. Если на неё нажать в горизонтальном направлении - она зафиксирует стойку.
- karabas2011
- Сообщения: 1607
- Зарегистрирован: 04 мар 2012, 01:06
- Откуда: Севастополь-Москва
Re: Новый подход к автоматическому выравниванию платформы
![]() Radus » 20 апр 2014, 19:48
Radus » 20 апр 2014, 19:48
Кто нибудь будет делать реализацию на RepRap ?
-

Radus - Сообщения: 581
- Зарегистрирован: 14 фев 2013, 23:39
- Откуда: Тольятти
Re: Новый подход к автоматическому выравниванию платформы
![]() icehardy » 21 апр 2014, 17:48
icehardy » 21 апр 2014, 17:48
похоже тут использовано колесо с канавками под управление каждым рычагом, они давят на рычаги каждый в свое время по ходу вращения
как регулятор заслонок печки в старых авто
а рычаги могут просто прижиматься к зубчатой поверхности, например резьбе
Идея хороша, но только для стола неподвижного или ездящего по оси Z
текст не читал, только картинку глянул ))
как регулятор заслонок печки в старых авто
а рычаги могут просто прижиматься к зубчатой поверхности, например резьбе
Идея хороша, но только для стола неподвижного или ездящего по оси Z
текст не читал, только картинку глянул ))
-

icehardy - Сообщения: 1282
- Зарегистрирован: 27 фев 2013, 16:59
- Откуда: Кострома
- Skype: icehardy
Re: Новый подход к автоматическому выравниванию платформы
![]() SDimok » 22 апр 2014, 04:55
SDimok » 22 апр 2014, 04:55
icehardy писал(а):похоже тут использовано колесо с канавками под управление каждым рычагом, они давят на рычаги каждый в свое время по ходу вращения
как регулятор заслонок печки в старых авто
а рычаги могут просто прижиматься к зубчатой поверхности, например резьбе
Идея хороша, но только для стола неподвижного или ездящего по оси Z
текст не читал, только картинку глянул ))
Канавка похоже одна, помечена на фотке маркером.
Как только рычаг попадает в канавку, прижим ослабевает.
Когда выравнивание заканчивается, канавка размещена между рычагов, и все они прижаты.
А на подвижном столе - да, мотор дополнительный вес.
Вот типа вот так
- Вложения
-
-
SDimok - Сообщения: 196
- Зарегистрирован: 11 сен 2013, 01:45
- Откуда: Саянск
- прог. языки: C++
- ФИО: Дмитрий
Re: Новый подход к автоматическому выравниванию платформы
![]() karabas2011 » 01 май 2014, 00:40
karabas2011 » 01 май 2014, 00:40
пардон за размер

- karabas2011
- Сообщения: 1607
- Зарегистрирован: 04 мар 2012, 01:06
- Откуда: Севастополь-Москва
Re: Новый подход к автоматическому выравниванию платформы
![]() Radus » 08 май 2014, 23:19
Radus » 08 май 2014, 23:19
А для чего микропереключатель?
-
Radus - Сообщения: 581
- Зарегистрирован: 14 фев 2013, 23:39
- Откуда: Тольятти
Re: Новый подход к автоматическому выравниванию платформы
![]() dccharacter » 08 май 2014, 23:27
dccharacter » 08 май 2014, 23:27
Неужели никто не попробовал прикрутить акселерометр к платформе. Или важно ее выставлять именно по соплу (непараллельность конструкции полу, увод направляющих и т.д.)?
-

dccharacter - Сообщения: 4995
- Зарегистрирован: 10 дек 2010, 13:16
- Откуда: Красногорск МО
- прог. языки: C, Python, wiring/processing
- ФИО: Андрей
Re: Новый подход к автоматическому выравниванию платформы
![]() Myp » 09 май 2014, 00:06
Myp » 09 май 2014, 00:06
проще платформу подогнать под оси, чем эти оси сделать строго горизонтальные.
-

Myp - скрытый хозяин вселенной :)
- Сообщения: 18018
- Зарегистрирован: 18 сен 2006, 12:26
- Откуда: Тверь по прозвищу Дверь
- прог. языки: псевдокод =) сила в алгоритме!
- ФИО: глубокоуважаемый Фёдор Анатольевич
Re: Новый подход к автоматическому выравниванию платформы
![]() hudbrog » 09 май 2014, 00:10
hudbrog » 09 май 2014, 00:10
Radus писал(а):А для чего микропереключатель?
Нажимается три раза, каждый раз, когда шестерня подходит к месту, где фиксируется шпилька, чтобы в этот момент сопло переставить в новое место.
-
hudbrog - Сообщения: 1585
- Зарегистрирован: 14 май 2008, 15:49
- Откуда: Москва
- ФИО: Алексей
Re: Новый подход к автоматическому выравниванию платформы
![]() CMYK » 25 май 2014, 03:39
CMYK » 25 май 2014, 03:39
Привет всем! принимайте в ряды 
Собрал Prusa i3. С большинством моментов уже разобрался, но как всегда наткнулся на косяк, который никак не могу победить. Плавное смещение по оси Y. Ремень подтягивал, шпули проверял, ток повышал, драйвера местами менял, DEFAULT_XYJERK понижал до 15... и ничего! уже голова лопается. Бобина пластика заканчивается
Собрал Prusa i3. С большинством моментов уже разобрался, но как всегда наткнулся на косяк, который никак не могу победить. Плавное смещение по оси Y. Ремень подтягивал, шпули проверял, ток повышал, драйвера местами менял, DEFAULT_XYJERK понижал до 15... и ничего! уже голова лопается. Бобина пластика заканчивается
- Вложения
-
- CMYK
- Сообщения: 4
- Зарегистрирован: 25 май 2014, 03:17
Сообщений: 27
• Страница 1 из 2 • 1, 2
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0