Модели 6-ти ногих пауков HexBugSpider, Stryder CC-1003
https://github.com/DmitLil/HexBugSpider
https://github.com/DmitLil/Stryder_CC1003
Для моделирования движений: Открыть сборку: assembly.iam
В board_drive:1 выделить Угол:1 - правая кнопка мыши - "Вариация зависимости"
Для изменения направления движения - менять значение в Угол:2
https://www.youtube.com/watch?v=PDMphlRWE0M
https://www.youtube.com/watch?v=S1iByKJPLc8
Заметки:
сборки в freecad 0.16:
https://www.youtube.com/watch?v=C6JdEHh3fVI
SOLVESPACE -- parametric 2d/3d CAD
http://solvespace.com/linkage.pl
https://www.youtube.com/watch?v=nVqa9csViXA
| |
roboforum.ruТехнический форум по робототехнике. |
|
Кинематика: HexBugSpider, Stryder CC-1003
Модераторы: 1970DenisT, Dmitry__
Сообщений: 14
• Страница 1 из 1
Кинематика: HexBugSpider, Stryder CC-1003
![]() Dmitry__ » 21 мар 2016, 19:38
Dmitry__ » 21 мар 2016, 19:38
-

Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Кинематика: HexBugSpider, Stryder CC-1003
![]() Шарик5000 » 23 мар 2016, 02:00
Шарик5000 » 23 мар 2016, 02:00
Вроде правильно, а траектории ужасны.
Можете в инвентор сделать траектории с такого ракурса и просто сфоткать экран? А только эти две лапы пересобрать чтобы были на одной линии при взгляде сверху? Отверстия должны совпадать.
Можете пересобрать здесь также 2 лапы чтобы Зеленые шестерни были в плоскости движения лап, и лапы были на одной линии как на первом рисунке ракурс, остальные детали скрыть? И сфоткать просто экран.
Добавлено спустя 8 минут 30 секунд:
Не увидел угол2 в описании мда…
В любом случае почему такие траектории выходят непонятно. Как их там рисовать я не знаю.
Можете в инвентор сделать траектории с такого ракурса и просто сфоткать экран? А только эти две лапы пересобрать чтобы были на одной линии при взгляде сверху? Отверстия должны совпадать.
Можете пересобрать здесь также 2 лапы чтобы Зеленые шестерни были в плоскости движения лап, и лапы были на одной линии как на первом рисунке ракурс, остальные детали скрыть? И сфоткать просто экран.
Добавлено спустя 8 минут 30 секунд:
Не увидел угол2 в описании мда…
В любом случае почему такие траектории выходят непонятно. Как их там рисовать я не знаю.
- Шарик5000
- Сообщения: 32
- Зарегистрирован: 15 фев 2016, 17:22
Re: Кинематика: HexBugSpider, Stryder CC-1003
![]() Dmitry__ » 23 мар 2016, 02:51
Dmitry__ » 23 мар 2016, 02:51
Все попробую, все проверю, ужОс как интересно, но у меня тоже есть несколько вопросов:
А почему там траектории должны быть красивые? HexBugSpider-а я в свое время исследовал, он тупо повторяет вращательное движение шестерни, как "механический копировальный станок с масштабом". Я приводил картинку бабульки на ходулях:
forum88/topic2053-2490.html#p263343
Реальные движения этих пауков тоже говорят о неидеальности траекторий, что ты там пытаешься найти?
Вообще, всей этой кинематике далеко до Чебышева...
Я могу попробовать в инвенторе сделать скриншоты через определенный угол с паузами, а потом склеить в гиф, но не понимаю зачем 2 ноги ставить в одну плоскость с водилой (180 град.)? Там лапы под 120 град, и траектории лап одного типа отличаются друг от друга. Которая будет в плоскости с водилой, будет повторять круговые движения, а другие 2 лапы этого типа будут двигаться с наклоном для HexBug и с поворотом шарнира бедра для CC-1003. Т.е. там все ужасно с траекториями: сведение задних лап при ходьбе, скручивание ступней, и еще туева хуча болячек...
Если ты будешь настаивать на проверках, то опиши точнее что надо сделать. ибо я не все понял из:
Еще вопросы:
Ты это все видишь в инвентор? Или не осилил и делаешь хитро скриншоты с видео? Может проще тебя обучить опред. действиям в инвенторе? Мне кажется, что так ты намного больше увидишь.
Добавлено спустя 6 минут 15 секунд:
Во, чтоб эти пауки пошли более менее нормально по Чебышеву, не шмякая лапами по полу, надо траекторию водилы делать по Чебышеву, т.е. приводную шестерню водилы менять на рычаги...
Кста, кинематику Чебышева (или Янсена?) тоже моделил в инвентор, могу поискать...
Добавлено спустя 5 минут 14 секунд:
Вот это моделил:
forum88/topic2053-2430.html#p262441
Вот оно, да, ходит как Плисецкая

А почему там траектории должны быть красивые? HexBugSpider-а я в свое время исследовал, он тупо повторяет вращательное движение шестерни, как "механический копировальный станок с масштабом". Я приводил картинку бабульки на ходулях:
forum88/topic2053-2490.html#p263343
Реальные движения этих пауков тоже говорят о неидеальности траекторий, что ты там пытаешься найти?
Вообще, всей этой кинематике далеко до Чебышева...
Я могу попробовать в инвенторе сделать скриншоты через определенный угол с паузами, а потом склеить в гиф, но не понимаю зачем 2 ноги ставить в одну плоскость с водилой (180 град.)? Там лапы под 120 град, и траектории лап одного типа отличаются друг от друга. Которая будет в плоскости с водилой, будет повторять круговые движения, а другие 2 лапы этого типа будут двигаться с наклоном для HexBug и с поворотом шарнира бедра для CC-1003. Т.е. там все ужасно с траекториями: сведение задних лап при ходьбе, скручивание ступней, и еще туева хуча болячек...
Если ты будешь настаивать на проверках, то опиши точнее что надо сделать. ибо я не все понял из:
Шарик5000 писал(а): А только эти две лапы пересобрать чтобы были на одной линии при взгляде сверху? Отверстия должны совпадать.
Шарик5000 писал(а):Можете пересобрать здесь также 2 лапы чтобы Зеленые шестерни были в плоскости движения лап, и лапы были на одной линии как на первом рисунке ракурс, остальные детали скрыть? И сфоткать просто экран.
Еще вопросы:
Ты это все видишь в инвентор? Или не осилил и делаешь хитро скриншоты с видео? Может проще тебя обучить опред. действиям в инвенторе? Мне кажется, что так ты намного больше увидишь.
Добавлено спустя 6 минут 15 секунд:
Во, чтоб эти пауки пошли более менее нормально по Чебышеву, не шмякая лапами по полу, надо траекторию водилы делать по Чебышеву, т.е. приводную шестерню водилы менять на рычаги...
Кста, кинематику Чебышева (или Янсена?) тоже моделил в инвентор, могу поискать...
Добавлено спустя 5 минут 14 секунд:
Вот это моделил:
forum88/topic2053-2430.html#p262441
Вот оно, да, ходит как Плисецкая
-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Кинематика: HexBugSpider, Stryder CC-1003
![]() linvinus » 23 мар 2016, 12:49
linvinus » 23 мар 2016, 12:49
а такого размера жука видели? https://www.youtube.com/watch?v=8olhHC2 ... e=youtu.be http://letsmakerobots.com/node/45669
-

linvinus - Сообщения: 1672
- Зарегистрирован: 29 апр 2011, 12:37
- Откуда: Москва
- прог. языки: С
Re: Кинематика: HexBugSpider, Stryder CC-1003
![]() Dmitry__ » 23 мар 2016, 14:34
Dmitry__ » 23 мар 2016, 14:34
Вах, вах, вах, хороший кит, почти все детали - листовой материал. Надо брать...
-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Кинематика: HexBugSpider, Stryder CC-1003
![]() Шарик5000 » 23 мар 2016, 15:04
Шарик5000 » 23 мар 2016, 15:04
Dmitry__ писал(а):А почему там траектории должны быть красивые?
В страйдере корпус движется довольно прямолинейно при большой амплитуде шага, судя по видео работы с небольшими волнами, значит окружность на входе лапы превращается почти в шапку гриба с близким к плоскому участку на фазе опоры. Т.е. в 3д если вход лапы сфера то выход шапка гриба.
А вообще правильно взять вход окружности в 6 плоскостях, и смотреть выход форму траекторий двух лап. Я не знаю как задать такие сложные траектории показать их в инвентор. Должно выгладить примерно так:
Другие лапы скрыть чтобы не отвлекали =).
Dmitry__ писал(а):он тупо повторяет вращательное движение шестерни, как "механический копировальный станок с масштабом"
Вход лапы окружность, если бы он копировал окружности то были бы окружности на выходе и огромные волны в траектории корпуса на каждом шаге с подъемом всего веса паука на каждом шаге а этого нет на видео. Довольно плавно идет.
Dmitry__ писал(а):Вообще, всей этой кинематике далеко до Чебышева...
Зато простота схемы: 1 окружность управляет 6 лапами причем 3 в одной фазе 3 в другой и не плохие формы траектории с близким к плоскому участку на фазе опоры.
Dmitry__ писал(а):зачем 2 ноги ставить в одну плоскость с водилой (180 град.)?
Чтобы в SAM сделать лапу. Я думал будет шапка гриба
Попробовал на страйдере почти идеальный ракурс а всеравно что то нетак.
Нужно глянуть на траекторию лап в инентор.
Dmitry__ писал(а):через определенный угол с паузами, а потом склеить в гиф,
А что там нет показа траектории точки? Не может такого быть. Я просто ничего в нем не знаю.
Dmitry__ писал(а):Ты это все видишь в инвентор?
В инвентор конечно, такие ракурсы не существуют в видео.
Dmitry__ писал(а):надо траекторию водилы делать по Чебышеву
Если вход делать по чебышеву то нужно два водила в противофазе причем они будут задевать друг за друга…и вообще тогда менять всю схему полностью… И это уже будет уровень нового патента.
Но зачем усложнять когда вот есть неплохая схема а водило одно для всех и самое простое окружность. Кстати… вы уверены что у страйдера вход окружность? У белого паука был эллипс.
Dmitry__ писал(а):кинематику Чебышева (или Янсена?) тоже моделил в инвентор, могу поискать...
Я их делал в SAM и много других...Но именно страйдер заинтересовал как самое простое решение и повороты есть.
Dmitry__ писал(а):ходит как Плисецкая
Координаты на многих сайтах не правильные. Вроде в патенте есть до N знака. Если делать 1 лапа заменяет колесо то нужен редуктор корректор. Кидал работающую схему с ютуба в теме пауков.
linvinus писал(а):а такого размера жука видели
Это вроде схема хексбаг просто другой масштаб.
- Шарик5000
- Сообщения: 32
- Зарегистрирован: 15 фев 2016, 17:22
Re: Кинематика: HexBugSpider, Stryder CC-1003
![]() linvinus » 23 мар 2016, 15:49
linvinus » 23 мар 2016, 15:49
да просто больше
вот ещё экземпляр докучи https://www.youtube.com/watch?v=0xXz7AHyaPI
вот ещё экземпляр докучи https://www.youtube.com/watch?v=0xXz7AHyaPI
-
linvinus - Сообщения: 1672
- Зарегистрирован: 29 апр 2011, 12:37
- Откуда: Москва
- прог. языки: С
Re: Кинематика: HexBugSpider, Stryder CC-1003
![]() Dmitry__ » 23 мар 2016, 16:10
Dmitry__ » 23 мар 2016, 16:10
Шарик5000 писал(а):В страйдере корпус движется довольно прямолинейно при большой амплитуде шага, судя по видео работы с небольшими волнами, значит окружность на входе лапы превращается почти в шапку гриба
Замерил просвет CC-1003 в минимальной и максимальной высоте полного шага, 6см и 8 см. Не могу сказать, что 2 см. - "довольно прямолинейно". Вообще, твоя вот эта картинка очень близка к реальным траекториям, которые я наблюдаю на своем CC-1003.
Сейчас еще сверху посмотрел на движения, при прохождении минимальной высоты просвета - лапы раздвигаются в стороны. Только пара: скользкие лапы/пол спасают ситуюцию. Игрушка все это...
По моделированию:
В CC-1003 в бедре рамка - ее трудно отмоделить в инвентор. Вот в этом видео рамка врезается в рычаг, а потом выпрыгивает из него
Чтоб сделать 2-е видео, где все лапы в движении, я уменьшил диаметр приводной шестерни, это могло ухудшить траектории ног. Посмотри на форму этой рамки, у нее есть плоская часть, которая ложится на рычаг во время подьема лапы. Это может значительно увеличить скорость подьема лап, но это не отмоделить в программах, где есть только точки крепления и рычаги. Чтоб это нормально отмоделить в инвентор, нужен быстрый комп, который в режиме "анализ контактов" будет нормально просчитывать твердотельное моделирование (без врезаний одной детали в другую). У меня все компы - калькуляторы на атомах, иногда получается отмоделить (на очень маленьких углах шага), а иногда деталь врезается в другую. Поймать стабильно правильное моделирование очень сложно. Я забил на это...-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Кинематика: HexBugSpider, Stryder CC-1003
![]() Шарик5000 » 23 мар 2016, 17:31
Шарик5000 » 23 мар 2016, 17:31
Dmitry__ писал(а): твоя вот эта картинка очень близка к реальным траекториям
Тогда почему не выбрали кинематику белого паука? Что то неправильно, красный паук идет 1 шаг почти прямая второй волна. Значит траектория лапы шапка гриба а второй перевернутый гриб. Страйдер идет слабыми волнами и сильно поднимает лапу. Значит траектории шапки гриба.
Отсюда вывод что неправильно у меня схемы вышли к хексабг и страйдеру в SAM.
Dmitry__ писал(а):я уменьшил диаметр приводной шестерни, это могло ухудшить траектории ног.
Это могло вообще поменять полностью траектории. А возможно вернуть правильный диаметр шестерням и анимировать схему из красной и синей лапы как выше? Вход 6 плоскостей с рис. выше.
- Шарик5000
- Сообщения: 32
- Зарегистрирован: 15 фев 2016, 17:22
Re: Кинематика: HexBugSpider, Stryder CC-1003
![]() Шарик5000 » 05 апр 2016, 14:47
Шарик5000 » 05 апр 2016, 14:47
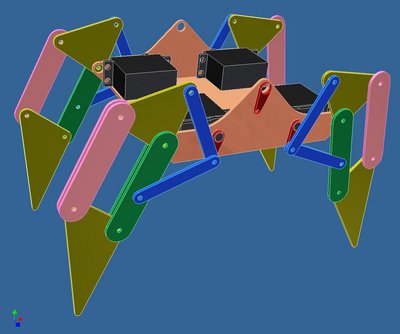
Так и не понял как собрали красного. Большой минус инвентора: шарниры в Assembly не тоже что в Dynamic сопряжения то нужно то нет.. то крутит нетак… жесть. Собрал тогда свои две лапы параметрических с нуля. Так и не знаю как сделать чтобы таскать одну точку а инвентор собирал механизм адаптивными звеньями. Как же лагает эта связь в Sketch понапихали 6000 функций которые сами включаться и не вкурить как делать правильно.. Непонятно как вы заставили работать водило как на обоих пауках? Это водило не может работать в симуляторе. Нужно делать с пазом, и в реале лучше так сделать т.к. если не точное исполнение механизм будет растягивать водило…
Шарниры как в пауке делали c 3 степени свободы не хотели стабильно работать, как я не шаманил с ними, то шарниры вырвало то сбрасывало связи... То шарнир плоскость\ цилиндр то пашет то нет… лаговый. Решил в итоге 3 кубами, каждый движется в своем направлении оси X Y Z, в итоге водим за сферич шарнир тело а за счет этих кубов у него 3 степени свободы вместо 6(нет вращений). Вообще это идиотизм…но задавал на форуме вопрос или не поняли или нет альтернативы.
Долго шаманил какое же может… ох и лаговый этот инвентор, шарниры исчезают, законы движения сбрасывает…как студенты делали этот инвентор. А навигация в 3д вообще жесть и это от Autodesk я в шоке... Некоторые варианты механики инвентор не мог посчитать вроде эта проблема называется шарнирный замок, вроде как студент запилил решатель кинематики туда…
В общем двум шарнирам задаю сложный закон движения графиков через Imposed motion.
В итоге водило может перемещаться по 3 осям по сложному закону описывая каждой точкой сферу по 8 плоскостям + по экватору.
Это позволяет видеть сразу все возможные амплитуды лапы, а за счет экватора видеть где лапы начинают опираться на грунт.
Схема с хекбага, лапы в другой фазе поэтому не совпадают с задней картинкой.
Сверху
сбоку
Если после экватора есть траектория то это будет подьем веса всего паука.
Как видим траектории ужасны, разные амплитуды лап, разные скорости…весь этот паук идет только за счет проскальзывания по полу при этом дико поднимаясь через каждый шаг( поверхность траектории левой лапы). А равномерная скорость всего паука только от усреднения скорости от проскальзывания лап.
Попробовал другие параметры лап с SAM
Сверху
Что в 2д неплохо в 3д жуть =). Точно та же огромная вытянутость траектории лап, хотя амплитуды лучше чем у хексбаг.
Может если будет энтузиазм сделаю эту модель в GeoGebra там будет налету считать…а не ждать этот тормазный и лаговый инвентор. Может если подобрать другие координаты всем шарнирам, хотя похоже этот вариант так и будет кривой шкрябалкой по полу.
Шарниры как в пауке делали c 3 степени свободы не хотели стабильно работать, как я не шаманил с ними, то шарниры вырвало то сбрасывало связи... То шарнир плоскость\ цилиндр то пашет то нет… лаговый. Решил в итоге 3 кубами, каждый движется в своем направлении оси X Y Z, в итоге водим за сферич шарнир тело а за счет этих кубов у него 3 степени свободы вместо 6(нет вращений). Вообще это идиотизм…но задавал на форуме вопрос или не поняли или нет альтернативы.
Долго шаманил какое же может… ох и лаговый этот инвентор, шарниры исчезают, законы движения сбрасывает…как студенты делали этот инвентор. А навигация в 3д вообще жесть и это от Autodesk я в шоке... Некоторые варианты механики инвентор не мог посчитать вроде эта проблема называется шарнирный замок, вроде как студент запилил решатель кинематики туда…
В общем двум шарнирам задаю сложный закон движения графиков через Imposed motion.
В итоге водило может перемещаться по 3 осям по сложному закону описывая каждой точкой сферу по 8 плоскостям + по экватору.
- ScreenShot01266.jpg (27.56 КиБ) Просмотров: 6672
Это позволяет видеть сразу все возможные амплитуды лапы, а за счет экватора видеть где лапы начинают опираться на грунт.
Схема с хекбага, лапы в другой фазе поэтому не совпадают с задней картинкой.
Сверху
сбоку
Если после экватора есть траектория то это будет подьем веса всего паука.
Как видим траектории ужасны, разные амплитуды лап, разные скорости…весь этот паук идет только за счет проскальзывания по полу при этом дико поднимаясь через каждый шаг( поверхность траектории левой лапы). А равномерная скорость всего паука только от усреднения скорости от проскальзывания лап.
Попробовал другие параметры лап с SAM
Сверху
Что в 2д неплохо в 3д жуть =). Точно та же огромная вытянутость траектории лап, хотя амплитуды лучше чем у хексбаг.
Может если будет энтузиазм сделаю эту модель в GeoGebra там будет налету считать…а не ждать этот тормазный и лаговый инвентор. Может если подобрать другие координаты всем шарнирам, хотя похоже этот вариант так и будет кривой шкрябалкой по полу.
- Шарик5000
- Сообщения: 32
- Зарегистрирован: 15 фев 2016, 17:22
Re: Кинематика: HexBugSpider, Stryder CC-1003
![]() Шарик5000 » 09 апр 2016, 12:37
Шарик5000 » 09 апр 2016, 12:37
Исправил шарниры своей схеме… совсем другое дело, координаты с hexbug не хочет считать где то ошибка.
- Шарик5000
- Сообщения: 32
- Зарегистрирован: 15 фев 2016, 17:22
Re: Кинематика: HexBugSpider, Stryder CC-1003
![]() Dmitry__ » 11 апр 2016, 02:35
Dmitry__ » 11 апр 2016, 02:35
Шарик5000 писал(а):Непонятно как вы заставили работать водило как на обоих пауках?
Ну инвентор да, не супер понятная система, я вьезжал 0.5 года во все тонкости.
У водило надо смотреть зависимости. По памяти:
Совмещение плоскости - чтоб не выкручивало водило, совмещение осей: отверстие водило с осью пальца круглой детали. У самих круглых деталей есть зависимость равенства угла - чтоб крутились синхронно.
Я слегка забил на все темы
 , если нужна помощь по инвертору, задавай вопросы односложно , одно сообщение - один вопрос, а то вопросы по 3д довольно сложные, понять вопрос по картинке в твоей голове, переданной по проводам в эти ваши интернеты - сложно, моя не всегда телепат
, если нужна помощь по инвертору, задавай вопросы односложно , одно сообщение - один вопрос, а то вопросы по 3д довольно сложные, понять вопрос по картинке в твоей голове, переданной по проводам в эти ваши интернеты - сложно, моя не всегда телепат -
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Re: Кинематика: HexBugSpider, Stryder CC-1003
![]() linvinus » 29 апр 2016, 22:57
linvinus » 29 апр 2016, 22:57
вот вам ещё ссылочка http://biorob.epfl.ch/cheetah (вроде в тему)
справа в меню есть ссылки на другие похожие конструкции
всего 4 сервы на одного кота
справа в меню есть ссылки на другие похожие конструкции
всего 4 сервы на одного кота
-
linvinus - Сообщения: 1672
- Зарегистрирован: 29 апр 2011, 12:37
- Откуда: Москва
- прог. языки: С
Re: Кинематика: HexBugSpider, Stryder CC-1003
![]() Dmitry__ » 28 дек 2016, 03:28
Dmitry__ » 28 дек 2016, 03:28
В Stryder CC-1003 воткнул свою электронику, робот стал полностью пропорциональным в управлении. Что могу сказать? При рассмотрении движения робота в замедленном варианте, робот полностью повторяет цифровую модель сделанную мною. Вощем все плохо в движениях в сравнении с Чебышевым, но добавляет шарм при виде "из глаз"
Если нужно, могу сделать видео.
Если нужно, могу сделать видео.
-
Dmitry__ - Сообщения: 8033
- Зарегистрирован: 13 янв 2011, 15:25
- Откуда: Санкт-Петербург
Сообщений: 14
• Страница 1 из 1
Вернуться в КиберЗона - клуб боевых роботов
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 4