Все это время, что не обновлялась тема, устройство по-тихоньку эволюционировало и нынче уже совсем непохоже на первоначальное.
Добавил, как и хотел, пару датчиков расстояния инфракрасных, микрофон, динамики.
А самое главное - совсем другая платформа.
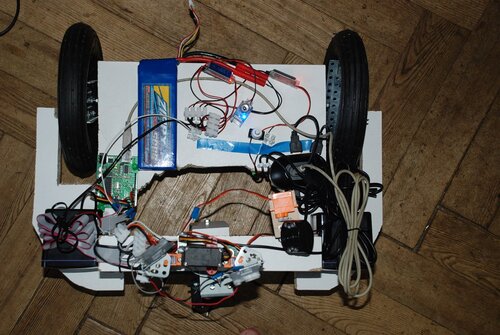
Проблема была в том, что с теми пластиковыми колесиками и только с передним приводом его проходимость была около нуля, а мне хотелось чтобы оно ездило не только в помещениях, но и по улице нормально проходило. Поэтому взяты колёса резиновые с хорошим сцеплением (являющиеся покрышками от колес для тачек) диаметром 200мм, клиренс платформы 70мм(островок 110х110 мм), а по всей остальной площади клиренс 100мм.
Корпус из ДСП толщиной 16мм, крепления частей делались как можно более прочными - металлическими(толщина, кажись, 1.5мм), всё прикручено саморезами на совесть, так что его можно брать за любой отросток корпуса - очень удобно и не надо бояться, что что-то отломается или погнётся. По части "крепости" конструкции самое слабое место пока что рулевая колонка - там шпилька 4мм диаметром, она гнётся довольно сильно(рычаг 230мм на изгиб), думаю поменять на диаметром 8мм, но это после того, как будет реализован базовый функционал.
Прилагаю фотки. Связь по Wi-Fi реализована, питание теперь с собой возит - LiPo 3S1P 5АЧ. Есть проблема с недостаточно мощными импульсниками, но это вскоре будет решено новой закупкой на хоббикинге. Колонки на борту мне очень понравились - это SVEN 315, питаются от USB, интерфейсный разъем мини-джек - орут будь здоров (а еще удобный регулятор громкости есть).
Привод колёс от переделанных под постоянное вращение серв HXT-12k(пока что только переднее колесо, остальные подготовлены, но без серв). Веб-камера с микрофоном (отдельный штекер на 3.5мм) и подсветкой (6 светодиодов) поставлена на pan/tilt из серв HXT HX5010 и HK15178. Руление осуществляет серва Pilotage S101 (возможно, придется заменить, если окажется слишком слабой). Два дальномера на сервах HK15178.
Операционка и всё остальное перенесено на шуструю 400x CF карточку вместо USB флешки - разница ощутимая.
Осталось найти место и прикрепить небольшое количество проводов, разводящих питание и аккумулятор.
Да, и еще: попроводил тесты на производительность и выяснилось, что под этой архитектурой кое-что полезное не запускается вовсе (в частности, ffserver), а также, что действительно для обработки видео система слабенькая. Пока что думаю сделать управление по Wi-Fi на сокетах кастомно + локальный консольный клиент по ssh, склеивание (или хотя бы синхронизация) аудио и видео с вебки и передача вовне, приём звука извне и с как можно меньшими задержками его воспроизведение (то есть пока забью на автономность), а затем посмотреть на оставшиеся вычислительные мощности (если таковые будут

) и там по возможности зрение и слух.
Наверняка, что-то забыл, ну да ладно, и так многа букав
 http://fotki.yandex.ru/users/pritmick/view/319271/
http://fotki.yandex.ru/users/pritmick/view/319271/ http://fotki.yandex.ru/users/pritmick/view/319272/
http://fotki.yandex.ru/users/pritmick/view/319272/ http://fotki.yandex.ru/users/pritmick/view/319273/
http://fotki.yandex.ru/users/pritmick/view/319273/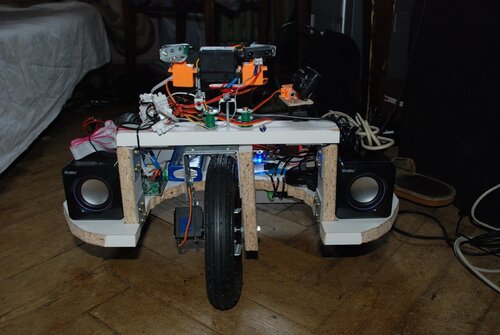 http://fotki.yandex.ru/users/pritmick/view/319274/
http://fotki.yandex.ru/users/pritmick/view/319274/ http://fotki.yandex.ru/users/pritmick/view/319275/
http://fotki.yandex.ru/users/pritmick/view/319275/ http://fotki.yandex.ru/users/pritmick/view/319276/
http://fotki.yandex.ru/users/pritmick/view/319276/ http://fotki.yandex.ru/users/pritmick/view/319278/
http://fotki.yandex.ru/users/pritmick/view/319278/




 , а сюда я их залить не могу по причине отсутствия. Эти фотки Vooon делал. Верни ссылки, злыдень
, а сюда я их залить не могу по причине отсутствия. Эти фотки Vooon делал. Верни ссылки, злыдень 
{kind=link}