Для слежения за маршрутом я было решено использовать смартфон HTC и алгоритмы компьютерного зрения. И вот, что из этого получилось:
01. Внешний вид робота. Шасси из деталей конструктора fischertechnik. Для управления моторами используются функции контроллера ROBO TX.

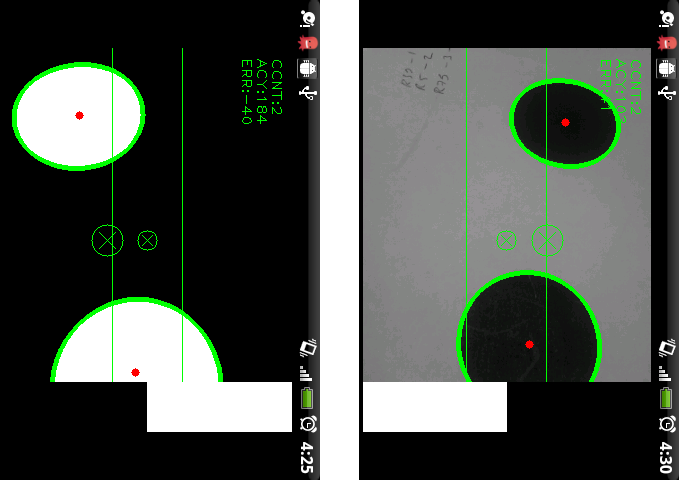
02. Картинки с экрана HTC
03. Мой заезд на соревнованиях
В конце робот зацепился за препятствие "Стиральная доска" и до финиша не доехал ) Думаю к следующему разу нужно доработать ходовую часть.
Более подробно о ходе мыслей во время разработки можно почитать тут - \m/.







