roboforum.ru
Технический форум по робототехнике.
Платформа для робота на базе неттопа или DIR-320
Re: Платформа для робота на базе неттопа или DIR-320
Почему это точное попадание потребуется для любой конструкции? Делаем 2 пластины длиной 18см и всё. Попадание контактами в любое место из 18см начинает зарядку.
Re: Платформа для робота на базе неттопа или DIR-320
тогда уж индуктивный узел придумать. кстати современный тренд зарядки мобильных устройств...
Re: Платформа для робота на базе неттопа или DIR-320
индуктивный узел 100% потребует большей точности, чем +\- 9см 
Re: Платформа для робота на базе неттопа или DIR-320
=DeaD=,учитывая что вы разрабатываете платформу в том числе для продажи, не желаете расширить ассортимент аналогом этого набора?
http://www.robotshop.com/oculus-2wd-mob ... ook-3.html

в некотором смысле, эта тележка проще и понятнее для простых людей. ноут на колесах у многих уже ассоциируется с тележкой удаленного присутствия. учитывая потенциально низкую цену (два слабых мотора, дешевые колеса), желающих приобрести должно быть не меньше чем вашу.
можно дополнить набор базой с зарядкой, платой и простеньким ПО, что бы запустить машинку кататься "из коробки". ну и прочий "обвес". как у автора
imho для квартиры отличный вариант
http://www.robotshop.com/oculus-2wd-mob ... ook-3.html
в некотором смысле, эта тележка проще и понятнее для простых людей. ноут на колесах у многих уже ассоциируется с тележкой удаленного присутствия. учитывая потенциально низкую цену (два слабых мотора, дешевые колеса), желающих приобрести должно быть не меньше чем вашу.
можно дополнить набор базой с зарядкой, платой и простеньким ПО, что бы запустить машинку кататься "из коробки". ну и прочий "обвес". как у автора
imho для квартиры отличный вариант
Re: Платформа для робота на базе неттопа или DIR-320
Да, посматриваю в эту сторону, но пока в приоритете - сделать полноценную компактную платформу на базе пластиковых мотор-редукторов, в т.ч. с базой для зарядки. Я думаю получится не сильно дороже набора для ноута, а по удобству будет намного лучше.
Re: Платформа для робота на базе неттопа или DIR-320
=DeaD= писал(а):Думаю предусмотреть узел на роботе для зарядки от базовой станции.
Есть какие-нибудь мысли вообще или по этому варианту?
Как вам система торможения самолетов на палубе авианосца? Если у робота есть клиренс под кузовом, то сделать два штыря(возможно складывающихся) и две рамки с пружинами на базе.
Re: Платформа для робота на базе неттопа или DIR-320
Складывающиеся - лишняя механика + привод, а если не складывающиеся, то цеплять будет всё что ни попадя 
Re: Платформа для робота на базе неттопа или DIR-320
Примитивно, т.е. пружиной складывать обратно(защелкивать) с помощью доп механики на базе. Конечно, сложно звучит, но можно попробовать.
Re: Платформа для робота на базе неттопа или DIR-320
Меня смущает, что всякие роботы-пылесосы обходятся без дополнительной механики. Я думаю вопрос только удачного размещения контактных пластин.
Re: Платформа для робота на базе неттопа или DIR-320
Ну тогда просто бампер с двумя отбойниками как на шахе
как на шахе Re: Платформа для робота на базе неттопа или DIR-320
Тогда потребуется точное позиционирование, чего хотелось бы избежать.
Я пока склоняюсь к варианту, при котором на 1 стороне точечные контакты, разнесенные по вертикали, а на второй - 2 плоских разнесенных по высоте контакта, тогда попадание в отрезок даст зарядку.
Я пока склоняюсь к варианту, при котором на 1 стороне точечные контакты, разнесенные по вертикали, а на второй - 2 плоских разнесенных по высоте контакта, тогда попадание в отрезок даст зарядку.
Re: Платформа для робота на базе неттопа или DIR-320
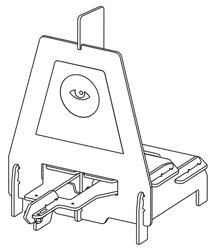
У себя сделал так:
пружинки и контактные площадки от батарейного отсека.
Минус - достаточно чуть отодвинуться, контакт становится
неплотным и 0.2в теряется, что в общем то ощутимо для зарядки.
На мой взгляд контакт надо под днищем делать,
пару пружинящих лепестков, чтобы робот наезжая,
своим весом делал нажим на контакты.
Если случится совсем точечный контакт, и ток зарядки несколько ампер,
то место точечного контакта будет сильно греться,
и пластмасса например, может плавиться,
поэтому у меня они на стеклотекстолите все
пружинки и контактные площадки от батарейного отсека.
Минус - достаточно чуть отодвинуться, контакт становится
неплотным и 0.2в теряется, что в общем то ощутимо для зарядки.
На мой взгляд контакт надо под днищем делать,
пару пружинящих лепестков, чтобы робот наезжая,
своим весом делал нажим на контакты.
Если случится совсем точечный контакт, и ток зарядки несколько ампер,
то место точечного контакта будет сильно греться,
и пластмасса например, может плавиться,
поэтому у меня они на стеклотекстолите все
- Вложения
-
Re: Платформа для робота на базе неттопа или DIR-320
=DeaD= писал(а):Да, посматриваю в эту сторону, но пока в приоритете - сделать полноценную компактную платформу на базе пластиковых мотор-редукторов, в т.ч. с базой для зарядки. Я думаю получится не сильно дороже набора для ноута, а по удобству будет намного лучше.
ок.
я надеюсь вы не будете против если я тут "поскладирую" инфу (размышления) по этой платформе (а она для нетбуков что сильно близко)?
http://www.xaxxon.com проект получил поддержку на http://www.kickstarter.com/projects/289 ... ence-robot есть раздел с открытым софтом. умельцы уже че-то пишут.
я считаю, основной прикол платформы в том, что вся энергия берется от нетбука, а зарядка есть собственный блок питания от нетбука и заряжает он собственно аккумулятор нетбука (никаких мучений\трат по этой части - используются уже имеющиеся контроллеры в аккумуляторе и схеме питания нетбука).
платка управляющая двигателями и сервой
см http://www.xaxxon.com/oculus/arduinoculus
можно собрать самому. есть схема, Eagle файлы. залит bootloaders arduino
пластиковые колеса\редуктор с хиленькими моторами (от USB ж питается)не известно какие. но судя по видео платформа катается достаточно уверенно. надо бы поискать подходящие. дешевая серва для качания перископа (!!!)из зеркал для встроенной вебкамеры (нехера оно? лучше сразу норм камеры прикрутить. см. ниже)
из дополнительного обвеса см http://www.xaxxon.com/shop разработчик предлагает подсветку опять же с питанием от USB и зачем то к ней отдельную плату сваял (нахера?).
ну и крепеж для ASUS Xtion PRO Live (по видео с использования которого я на платформу и вышел)
станция зарядки заточена под машинное зрение
но тоже впринипе ничего сложного
ПО предлагает RoboRealm Computer Vision см. http://www.roborealm.com/ (ну нах когда есть opensoft)
вообщем я поддерживаю идею превращения нетбука (который можно взять БУ с ценой <200$ и не плохо бы с GPU от nVidea для cuda расчетов) в автономного робота малой кровью ( с достаточно большими возможностями).
все ж можно подрубить Kinect\Xtion, накатить ROS, SlAM запустить, внешние устройства подрубить.
в пределах возможностей питания от USB.
Хотя...можно найти что то с USB 3.0 .
можно вмешаться в недры нетбука и попробовать запитаться от выхода аккумулятора. интересно кто-нибудь пробовал?
Ну или в отдаленной перспективе поставить отдельный аккум и контроллер зарядки для внешних устройств с возможностью подзарядки от того же БП от нетбука.
затраты базового набора только на корпус для нетбука, корпус для станции зарядки, разъемы для подключения питания (тут и там), платку, моторы\редукторы\колеса.
это должно быть дешего. (разработчик жадный гад просит $288.30 за набор с перископом(лол))
Re: Платформа для робота на базе неттопа или DIR-320
Блин, это же дуня интегрированная с мотор-шилдом
Re: Платформа для робота на базе неттопа или DIR-320
С отстойным, надо сказать, мотор-шилдом