https://pp.vk.me/c7010/c620229/v6202291 ... ummv2Y.jpg
https://pp.vk.me/c7010/c620229/v6202291 ... NSeBqs.jpg
| |
roboforum.ruТехнический форум по робототехнике. |
|
Nesenin блог
Правила форума
В данном разделе каждый может иметь не более одной темы. Тема должна начинаться с логина (ника) робофорума.
В данном разделе каждый может иметь не более одной темы. Тема должна начинаться с логина (ника) робофорума.
Сообщений: 41
• Страница 2 из 3 • 1, 2, 3
Re: Nesenin блог
![]() Nesenin » 24 сен 2014, 23:46
Nesenin » 24 сен 2014, 23:46
Последний раз редактировалось Nesenin 19 дек 2016, 16:52, всего редактировалось 1 раз.
-

Nesenin - Сообщения: 1345
- Зарегистрирован: 26 янв 2012, 03:59
- Откуда: Казань
- прог. языки: LabVIEW
- ФИО: Никита Есенин

-

Myp - скрытый хозяин вселенной :)
- Сообщения: 18018
- Зарегистрирован: 18 сен 2006, 12:26
- Откуда: Тверь по прозвищу Дверь
- прог. языки: псевдокод =) сила в алгоритме!
- ФИО: глубокоуважаемый Фёдор Анатольевич
Re: Nesenin блог
![]() Nesenin » 26 сен 2014, 00:49
Nesenin » 26 сен 2014, 00:49
я вот моторы винты на коптере балансировал балансировал... а там все вибра да желе. оказалось что при проходе винта над лучем тяга падает воздух о луч ударяется от сюда вибра. даже тест прогнал
более менее сносная развязка на тросиках

первый смотрибельный ролик
подергивания есть еще. можно еще поколдовать с развязкой ну и на крупных планах можно программную стабилизацию юзать.
и надо бы для порядка попробовать коптер с нижним расположением моторов
более менее сносная развязка на тросиках
первый смотрибельный ролик
подергивания есть еще. можно еще поколдовать с развязкой ну и на крупных планах можно программную стабилизацию юзать.
и надо бы для порядка попробовать коптер с нижним расположением моторов
-
Nesenin - Сообщения: 1345
- Зарегистрирован: 26 янв 2012, 03:59
- Откуда: Казань
- прог. языки: LabVIEW
- ФИО: Никита Есенин


{kind=link}
{kind=link}
-
Nesenin - Сообщения: 1345
- Зарегистрирован: 26 янв 2012, 03:59
- Откуда: Казань
- прог. языки: LabVIEW
- ФИО: Никита Есенин
-
Nesenin - Сообщения: 1345
- Зарегистрирован: 26 янв 2012, 03:59
- Откуда: Казань
- прог. языки: LabVIEW
- ФИО: Никита Есенин
Re: Nesenin блог
![]() MegaBIZON » 03 мар 2015, 11:06
MegaBIZON » 03 мар 2015, 11:06
весело живёшь, одним словом ))
________________
так стоп...
Это тоесть типа покупное чучело для сжигания???
ээээ
________________
так стоп...
Это тоесть типа покупное чучело для сжигания???
ээээ
-

MegaBIZON - Сообщения: 6285
- Зарегистрирован: 12 янв 2007, 00:34
- Откуда: Масква
-
Nesenin - Сообщения: 1345
- Зарегистрирован: 26 янв 2012, 03:59
- Откуда: Казань
- прог. языки: LabVIEW
- ФИО: Никита Есенин
Re: Nesenin блог
![]() Nesenin » 11 окт 2015, 23:49
Nesenin » 11 окт 2015, 23:49
Вышел, так сказать, на новый уровень в теме постройки наиболее эффективных мультироторов долголетов/дальнолетов/грузолетов.
есть точный расчет времени полета по реальным данным post338373.html#p338373
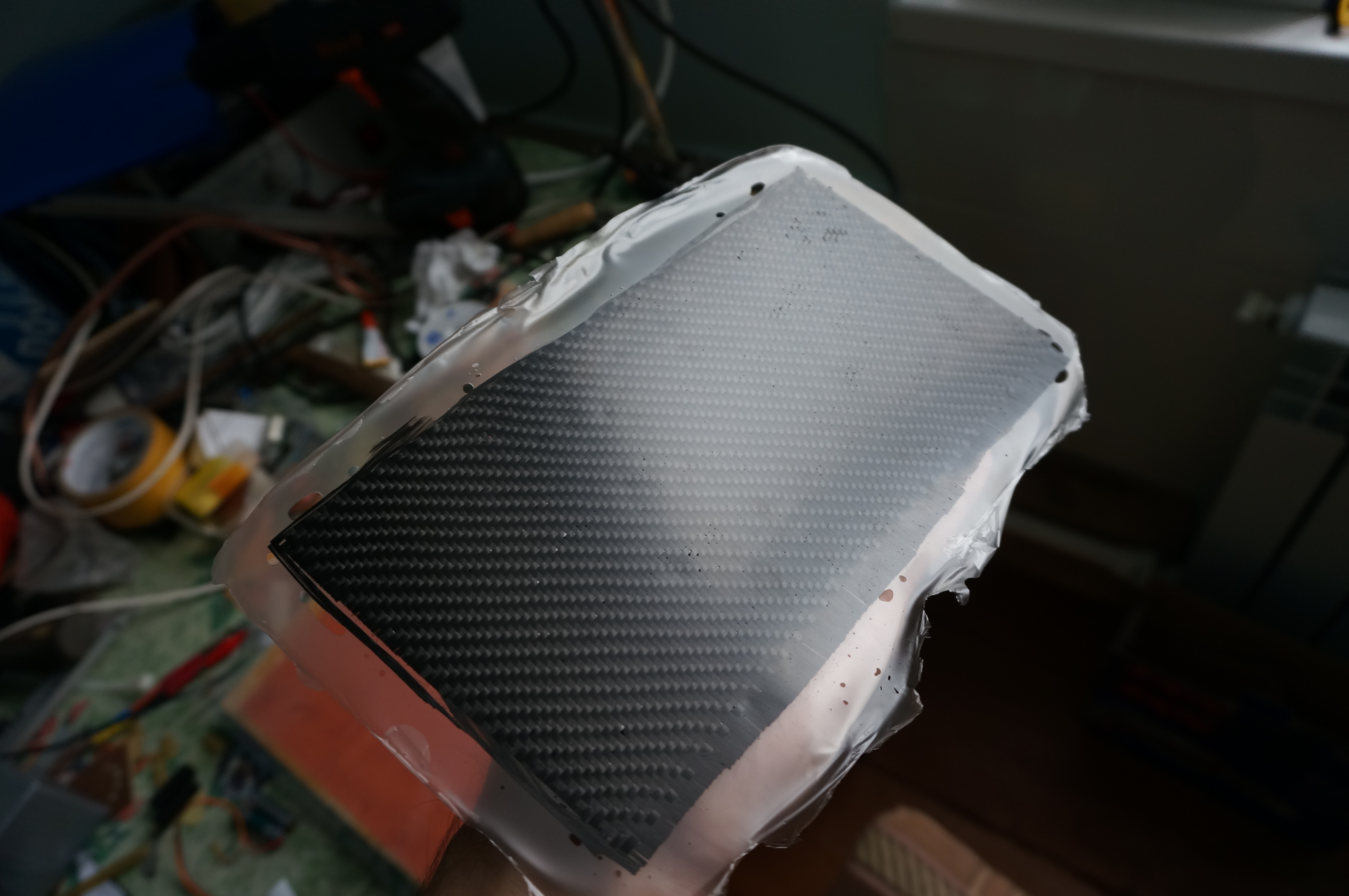
осваиваю изготовление аппаратов из карбона и арамидных сот (пока ручным методом)




эт складная разборная рама 650мм для умещения в рюкзак 28литров.
Практически я могу сейчас произвести испытания ВМГ на стенде, отобрать пропеллеры, подобрать под нужную нагрузку оптимальный ВМГ и общий конфиг с максимизацией времени полета, включая точные данные батареи. Разработать, сделать конструкцию нужной прочности с минимизацией массы. Скоро займусь практикой дальнобойной радиосвязи. По примеру http://forum.rcdesign.ru/blogs/153258/blog19581.html
есть точный расчет времени полета по реальным данным post338373.html#p338373
осваиваю изготовление аппаратов из карбона и арамидных сот (пока ручным методом)



эт складная разборная рама 650мм для умещения в рюкзак 28литров.
Практически я могу сейчас произвести испытания ВМГ на стенде, отобрать пропеллеры, подобрать под нужную нагрузку оптимальный ВМГ и общий конфиг с максимизацией времени полета, включая точные данные батареи. Разработать, сделать конструкцию нужной прочности с минимизацией массы. Скоро займусь практикой дальнобойной радиосвязи. По примеру http://forum.rcdesign.ru/blogs/153258/blog19581.html
-
Nesenin - Сообщения: 1345
- Зарегистрирован: 26 янв 2012, 03:59
- Откуда: Казань
- прог. языки: LabVIEW
- ФИО: Никита Есенин
Re: Nesenin блог
![]() Aseris » 12 окт 2015, 13:34
Aseris » 12 окт 2015, 13:34
Мож интересно будет
http://diydrones.com/profiles/blogs/vid ... d-tracking
http://diydrones.com/profiles/blogs/vid ... d-tracking
-

Aseris - Сообщения: 1142
- Зарегистрирован: 01 сен 2009, 14:58
- Откуда: Чехия
- прог. языки: C/С++, VHDL, Verilog, ASM, Python
Re: Nesenin блог
![]() Nesenin » 03 ноя 2015, 23:38
Nesenin » 03 ноя 2015, 23:38
вот такой получился аппарат

тут еще https://fotki.yandex.ru/users/emilkalol/album/220636/
вес без батарейки и полезной нагрузки

ну и по расчетам в зависимости от крутизны батареек может летать без всего ток с батарейкой свыше 2х часов.
да и с нагрузкой не так плохо. даж если 1кг навесить 75 мин . с меньшим больше)
но эт с liion которые плотность 260Вт*ч\кг имеют. например относительно бюджетные LG 18650 MJ1 3500 мАч
тут еще https://fotki.yandex.ru/users/emilkalol/album/220636/
вес без батарейки и полезной нагрузки
ну и по расчетам в зависимости от крутизны батареек может летать без всего ток с батарейкой свыше 2х часов.
да и с нагрузкой не так плохо. даж если 1кг навесить 75 мин . с меньшим больше)
но эт с liion которые плотность 260Вт*ч\кг имеют. например относительно бюджетные LG 18650 MJ1 3500 мАч
-
Nesenin - Сообщения: 1345
- Зарегистрирован: 26 янв 2012, 03:59
- Откуда: Казань
- прог. языки: LabVIEW
- ФИО: Никита Есенин
-
Nesenin - Сообщения: 1345
- Зарегистрирован: 26 янв 2012, 03:59
- Откуда: Казань
- прог. языки: LabVIEW
- ФИО: Никита Есенин
Re: Nesenin блог
![]() Nesenin » 10 янв 2016, 19:45
Nesenin » 10 янв 2016, 19:45
Рабочий вариант FPV коптера долголета\дальнолета, умещаюещегося в рюкзак 28литров.

Вес без акума 766гр. С имеющимся акумом время висения до 80мин. С лучшим, по расчетам, до 120мин.
РУ на 433Мгц антены диполь. Передатчик 1Вт. Должно летать свыше 10км. Видео 800мВт. Антена широкполосная крайне хорошый КСВ, но малость не вписывается. Пытался коаксиальный диполь замутить. Не получается хороший КСВ сделать. Как получится, заменю. Есть у меня 500мВт модемы 915Мгц для возможности перевести управление полностью на ПО mission planner (полетный контроллер PX4 lite со всеми возможностями). Пока не до этого.
Запас по тяге огромный. Можно хоть 1кг навесить полезной нагрузки.
Добавлено спустя 28 минут 19 секунд:
http://geektimes.ru/post/268780/ многозначащая новость для человечества. считаю необходимым менять код человека. исправлять проблемы и развивать в нужном направлении. из направлений известна 1 цель - выживание в долгосрочной перспективе. по проблемам говорить даж не хочется. кроме физ.недостатков, заболеваний и просто мутаций, ведущих, скажем, к отфильтровыванию половым отбором, есть прямая угроза для озвученной цели


Вес без акума 766гр. С имеющимся акумом время висения до 80мин. С лучшим, по расчетам, до 120мин.
РУ на 433Мгц антены диполь. Передатчик 1Вт. Должно летать свыше 10км. Видео 800мВт. Антена широкполосная крайне хорошый КСВ, но малость не вписывается. Пытался коаксиальный диполь замутить. Не получается хороший КСВ сделать. Как получится, заменю. Есть у меня 500мВт модемы 915Мгц для возможности перевести управление полностью на ПО mission planner (полетный контроллер PX4 lite со всеми возможностями). Пока не до этого.
Запас по тяге огромный. Можно хоть 1кг навесить полезной нагрузки.
Добавлено спустя 28 минут 19 секунд:
http://geektimes.ru/post/268780/ многозначащая новость для человечества. считаю необходимым менять код человека. исправлять проблемы и развивать в нужном направлении. из направлений известна 1 цель - выживание в долгосрочной перспективе. по проблемам говорить даж не хочется. кроме физ.недостатков, заболеваний и просто мутаций, ведущих, скажем, к отфильтровыванию половым отбором, есть прямая угроза для озвученной цели
Последний раз редактировалось Nesenin 19 дек 2016, 16:53, всего редактировалось 1 раз.
-
Nesenin - Сообщения: 1345
- Зарегистрирован: 26 янв 2012, 03:59
- Откуда: Казань
- прог. языки: LabVIEW
- ФИО: Никита Есенин
Re: Nesenin блог
![]() Nesenin » 19 дек 2016, 16:47
Nesenin » 19 дек 2016, 16:47
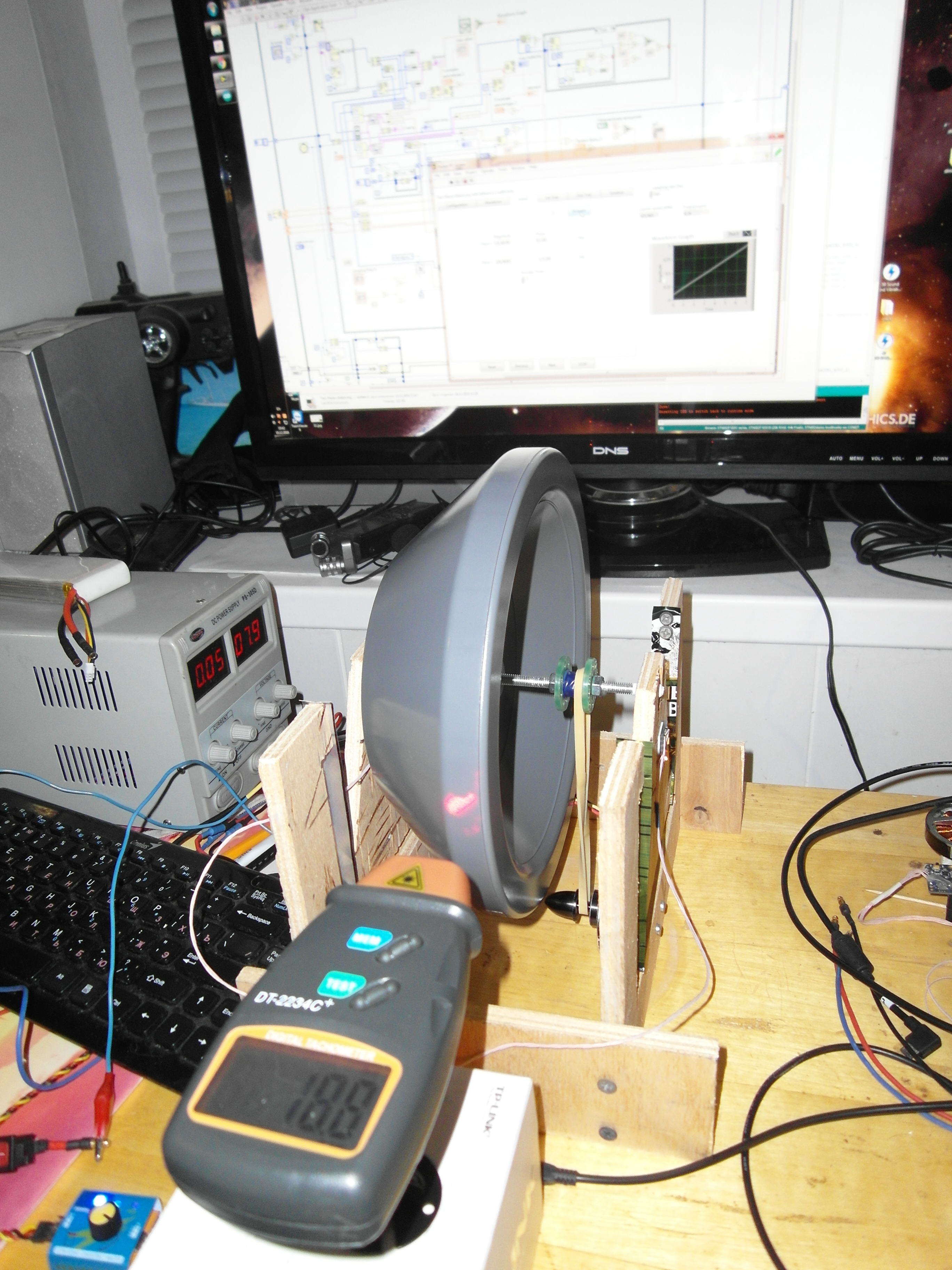
Опробовал динамичесую балансировку (по двум плоскостям) вот на основе этого исходника
http://www.ni.com/example/12500/en/#top
сделал стенд
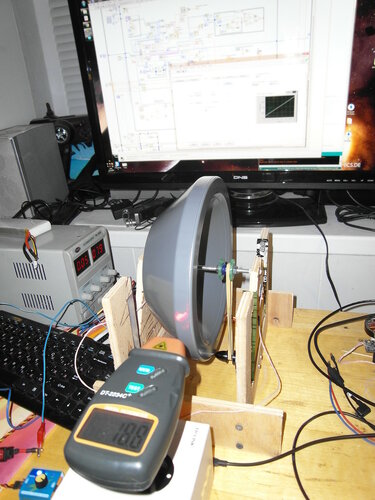
тут в качестве датчика оборотов доработанный тахометр.
акселерометры MPU6050 и платка stm32 maple mini
по инструкции https://geektimes.ru/post/277928/ переделал в arduino и воспользовавшись помощью организовал выдачу данных.
исходник под labview доработал.
вроде получилось. По теории должно 2х грузов хватать, но я пока сначала статическую балансировку не сделал (1 плоскость равновесие чтоб не крутилось) чет не получалось.
PS я тут помощи просил по коду http://arduino.ru/forum/programmirovani ... ent-243930 есть проблема зависания при возникновении ошибки в шине. может кто знает как поправить?
http://www.ni.com/example/12500/en/#top
сделал стенд
тут в качестве датчика оборотов доработанный тахометр.
акселерометры MPU6050 и платка stm32 maple mini
по инструкции https://geektimes.ru/post/277928/ переделал в arduino и воспользовавшись помощью организовал выдачу данных.
исходник под labview доработал.
вроде получилось. По теории должно 2х грузов хватать, но я пока сначала статическую балансировку не сделал (1 плоскость равновесие чтоб не крутилось) чет не получалось.
PS я тут помощи просил по коду http://arduino.ru/forum/programmirovani ... ent-243930 есть проблема зависания при возникновении ошибки в шине. может кто знает как поправить?
- Код: Выделить всё • Развернуть
#include <HardWire.h>
HardWire H1Wire(1, I2C_FAST_MODE); // I2c1
#define M_S 1000
int z_1[M_S];
int z_2[M_S];
int x_1[M_S];
int i=0;
int16_t AcX,AcY;
void setup()
{
Serial.begin(115200);
H1Wire.begin();
H1Wire.beginTransmission(0x69); //77
H1Wire.write(0x6B);
H1Wire.write(0x00);
byte error=H1Wire.endTransmission();
Serial.print(error, HEX);
H1Wire.beginTransmission(0x68); //77
H1Wire.write(0x6B);
H1Wire.write(0x00);
byte error2=H1Wire.endTransmission();
Serial.print(error, HEX);
}
void loop()
{
delayMicroseconds(720);
x_1[i] = digitalRead(PB9); // считываем значение с входа
H1Wire.beginTransmission(0x69);
H1Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
H1Wire.endTransmission();
H1Wire.requestFrom(0x69,2); // request a total of 14 registers
AcX=H1Wire.read()<<8 | H1Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
H1Wire.beginTransmission(0x68);
H1Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
H1Wire.endTransmission();
H1Wire.requestFrom(0x68,2); // request a total of 14 registers
AcY=H1Wire.read()<<8 | H1Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
z_1[i] = AcY;
z_2[i] = AcX;
i++;
if(i==M_S)
{
for(i=0;i<M_S;i++)
{
Serial.write((uint8_t)(z_1[i] >> 8)); Serial.write((uint8_t)(z_1[i] & 0xFF));
Serial.write((uint8_t)(z_2[i] >> 8)); Serial.write((uint8_t)(z_2[i] & 0xFF));
Serial.write((uint8_t)(x_1[i] >> 8)); Serial.write((uint8_t)(x_1[i] & 0xFF));
}
i=0;
}
}
-
Nesenin - Сообщения: 1345
- Зарегистрирован: 26 янв 2012, 03:59
- Откуда: Казань
- прог. языки: LabVIEW
- ФИО: Никита Есенин
Re: Nesenin блог
![]() Nesenin » 30 дек 2016, 00:12
Nesenin » 30 дек 2016, 00:12
работает прога. можно в собственных опорах балансировать без стенда. точность со стендом высока. есть только тонкости с методикой балансировки. точность установки и геометрия грузов все влияет на результат. если технология отработанная (однотипные грузы места установки) можно за 1 итерацию достаточно точно балансировать. по тестовым ротором получалось магнитуду с 100-200 единиц понижать до 5 на тех же оборотах. на уровне шумов датчиков. круто !
-
Nesenin - Сообщения: 1345
- Зарегистрирован: 26 янв 2012, 03:59
- Откуда: Казань
- прог. языки: LabVIEW
- ФИО: Никита Есенин
Сообщений: 41
• Страница 2 из 3 • 1, 2, 3
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0