Собственно.. передвижение робота по ровному полу, это конечно же хорошо и довольно просто.
Но живем мы не в 16 веке, и хотелось бы не стоять на месте. Отсюда возникает вопрос.
Как можно сделать роботу "реальное зрение", из выше перечисленных датчиков.
Хотелось бы, что бы у робота в мозгах было свое окружающее 3-д пространство, где он мог бы видеть хотя бы на 5 метров в даль, в любом направлении на любой плоскости по отношению к нему.
Т.е. что бы программа скажем исходила из полученных данных не так:
движение вперед
датчик - на расстоянии 2м приближается с такой то скоростью препятствие.
алгоритм вычисляет любой рандомный не большой поворот от препятствия и двигается дальше.
вот что хотелось бы:
(скажем для двунога)
цель: (добраться из пункта А "комната А в квартире, в комнату Б в этой же квартире, преодолев все препятствия"
движение вперед: (быстрая ходьба)
мозг видит 3д изображение пола стен потолка и предметов мебели.
Датчики сообщают о приближении коробки с такой-то скоростью.
в 2-вух метрах впереди видит в 3-д коробку (ее ширину высоту и положение относительно стен)
алгоритм вычисляет с какой стороны ее обойти относительно того что бы путь из точки А до точки Б был меньше
поворачивает на ходу на такое то количество градусов обходя коробку
поворачивает в коридор
датчики сообщают о приближении коробки на расстоянии 2-вух метров с такой то скоростью.
мозг видит в 3д коробку ее высоту и видит что ширина равна ширине коридора (т.е. не обойти) но высота подходит
для прыжка на нее.
алгоритм вычисляет разгон и прыжок, робот продолжая движение за 20-30 см к коробке начинает бежать и запрыгивает на коробку
спрыгивает с другой стороны и продолжает движение к точке Б
в общем что-то такое.
Да я знаю что это сумасшедшие алгоритмы и не простая программа, и не все сразу и не за один день (возможно и год)
вопрос собственно в другом, способны ли какие-то датчики или их смесь делать в реальном времени 3д изображение окружающего пространства робота (желательно поподробнее с скажем спичкой лежащей на полу) для программы которая будет видеть положение робота в этом пространстве и управлять его движением?
вроде все.
roboforum.ru
Технический форум по робототехнике.
УЗ Видео ИК...
Re: УЗ Видео ИК...
способны ли какие-то датчики или их смесь делать в реальном времени 3д изображение окружающего пространства робота
Да их выпускает фирма SICK.
Re: УЗ Видео ИК...
Виталий писал(а):Да их выпускает фирма SICK.
"Среди последних разработок SICK AG можно отметить и камеру IVC-3D в корпусе из нержавеющей стали, предназначенную специально для пищевой промышленности. Это первая в мире трехмерная интеллектуальная камера, сконструированная для работы в тяжелых условиях пищевой промышленности. Суть разработки – в прецизионном измерении формы и объема с очень малым временем отклика."
Это оно? Если да то не годиться, тут используются несколько объективов перед и за объектом чтобы определить его как 3Д объект. В общем тут что-то типа продвинутого стереоскопического зрения, а это - дорогущие две камеры, плюс постоянная нехватка освещения.
Я бы хотел видеть в зрении что-то типа стереоскопического ультразвукового локатора, но я не знаю как работают ультразвуковые датчики. Было бы замечательно иметь что-то типа зрения летучей мыши, у нее ведь мозг определяет отражение звука как некую картинку. Но как это сделать с нашими УЗ сенсорами я без понятия..
Может кто-то описать работу УЗ дальномеров, которые вот продаются с дальностью на 7 метров,

можно ли как-то с их помощью получить картинку изображения (ну и за счет точности отражений по разности эха определяя дистанцию, картинка должна быть в 3D), способны ли УЗ датчики получать отражение эха от плоскости которая стоит не напротив него, а повернута на 45 градусов (т.е. по идее должна отражать эхо на 90 градусов от датчика)?
Re: УЗ Видео ИК...
Решений много и разных.
Есть камеры со скорострельными затворами, которые измеряют время пролета света, есть сканирующие лидары, есть фазированные УЗ-локаторы - решений до фига.
гуглить за вас?
Есть камеры со скорострельными затворами, которые измеряют время пролета света, есть сканирующие лидары, есть фазированные УЗ-локаторы - решений до фига.
гуглить за вас?
Re: УЗ Видео ИК...
Вот тут прямо про это. Автор сайта бывает на робофоруме, зовут DI HALT.
Re: УЗ Видео ИК...
Grem писал(а):Нет, вот они, на бампере по бокам.
Ну все то же стерео зрение с нехваткой света.
В общем нада будет на днях покапать гугл на тема УЗ локаторов или чего-то такого.
Re: УЗ Видео ИК...
В таком виде как он есть maxsonar совершенно бесполезен. Ковырял схему из даташита, приделал рупор, поразному игрался с прошивкой, максимум, что можно выжать - ну есть там предмет на растоянии 3-5 метров. Перпендикулярные стены видны замечательно остальное средне паршиво.
Основные проблемы - это малая скорость звука(измерения очень долго длятся) и "невидимость стен под углами".
Может сделав линейную решетку из датчиков(чтоб многолепестковую ДН сформировать) + непрерывный подсвет, что то и получится но ИМХО это уже слишком сложно.
Основные проблемы - это малая скорость звука(измерения очень долго длятся) и "невидимость стен под углами".
Может сделав линейную решетку из датчиков(чтоб многолепестковую ДН сформировать) + непрерывный подсвет, что то и получится но ИМХО это уже слишком сложно.
Re: УЗ Видео ИК...
ну вот.. блин... что же тогда придумать то?
у меня в голове вот не укладывается какой тогда датчик способен видеть в 3д картинку перед собой.. Ну не чистое 3д, а просто картинку и выстроить, что на картинке тумбочка стоящая слева на полу, имеет такую-то высоту, и расположена стенками к датчику под такими-то углами.., что пол уходит из под робота под таким-то углом на такое-то расстояние и упирается в стенку.. что-то такое..
Добавлено спустя 3 минуты 29 секунд:
я видел 3д сканеры, где веб камера направленная на объект, над веб камерой на определенной высоте стоит полосовой лазерный указатель, который сверху вниз сползает и получается то о чем я говорю, но во первых такого рода зрение отпадает по причине "ну нафиг чтобы робот тебе постоянно по глазам лазером бил", во вторых сканирование довольно медленное... а тут нужно что-то очень быстрое..
как же блин наш мозг работает на стереоскопии вычисляя все о чем я говорю? ))
))
Добавлено спустя 3 минуты 8 секунд:
в принципе можно сказать что здесь сама природа мама нам подсказывает что у всех животных по 2 глаза (или более но все работают по принципу стереоскопии), значит нада таки использовать именно ее..
значит нужны две мощные но мелкие камеры, и думать над алгоритмом стереоскопии с вычислением расстояний, или спереть у фирмы "SICK" исходники
у меня в голове вот не укладывается какой тогда датчик способен видеть в 3д картинку перед собой.. Ну не чистое 3д, а просто картинку и выстроить, что на картинке тумбочка стоящая слева на полу, имеет такую-то высоту, и расположена стенками к датчику под такими-то углами.., что пол уходит из под робота под таким-то углом на такое-то расстояние и упирается в стенку.. что-то такое..
Добавлено спустя 3 минуты 29 секунд:
я видел 3д сканеры, где веб камера направленная на объект, над веб камерой на определенной высоте стоит полосовой лазерный указатель, который сверху вниз сползает и получается то о чем я говорю, но во первых такого рода зрение отпадает по причине "ну нафиг чтобы робот тебе постоянно по глазам лазером бил", во вторых сканирование довольно медленное... а тут нужно что-то очень быстрое..
как же блин наш мозг работает на стереоскопии вычисляя все о чем я говорю?
))Добавлено спустя 3 минуты 8 секунд:
в принципе можно сказать что здесь сама природа мама нам подсказывает что у всех животных по 2 глаза (или более но все работают по принципу стереоскопии), значит нада таки использовать именно ее..
значит нужны две мощные но мелкие камеры, и думать над алгоритмом стереоскопии с вычислением расстояний, или спереть у фирмы "SICK" исходники
Re: УЗ Видео ИК...
с лазером про это вы говорили forum35/topic6698.html
кстати а есть аткое лазер, который камере виден, а глазу не виден и не вреден? или просто не вреден...
кстати а есть аткое лазер, который камере виден, а глазу не виден и не вреден? или просто не вреден...
Re: УЗ Видео ИК...
flyroman писал(а):кстати а есть аткое лазер, который камере виден, а глазу не виден и не вреден? или просто не вреден...
Нет! только если мощность очень мала, но тогда и камера его не увидит.
Добавлено спустя 1 минуту 30 секунд:
Pirate писал(а):у всех животных по 2 глаза (или более но все работают по принципу стереоскопии)
не выдумывайте.
Re: УЗ Видео ИК...
аккомодация тоже полезная штука
а у камер это контрастный автофокус
наметив много много точек для фокусировки можно измерить дистанции до всех точек, ну конечно приблизительно.
чем дальше тем меньше точность.
или например гнать фокус от мин. к макс. снимая последовательно картинки.
потом сложив все картинки в пачку можно по контрасту построить карту глубин.
есть прога она 3Д модель строит по фотографиям с разным фокусом. в принципе получается конечно хреново но например коробку на полу она нарисует квадратным выпуклым объектом.
а у камер это контрастный автофокус
наметив много много точек для фокусировки можно измерить дистанции до всех точек, ну конечно приблизительно.
чем дальше тем меньше точность.
или например гнать фокус от мин. к макс. снимая последовательно картинки.
потом сложив все картинки в пачку можно по контрасту построить карту глубин.
есть прога она 3Д модель строит по фотографиям с разным фокусом. в принципе получается конечно хреново но например коробку на полу она нарисует квадратным выпуклым объектом.
Re: УЗ Видео ИК...
Michael_K писал(а):Pirate писал(а):у всех животных по 2 глаза (или более но все работают по принципу стереоскопии)
не выдумывайте.
Ну у хищников точно
Re: УЗ Видео ИК...
речь идет о распознавании объектов,
программно,
если рассматривать передвижение из комнаты в комнату
то главное найти ДВЕРЬ))) (проход)
... и препятствия объехать
Re: УЗ Видео ИК...
Я ваш единомышленник, занимаюсь тем же самым вопросом. Создал вот такой робот для опытов
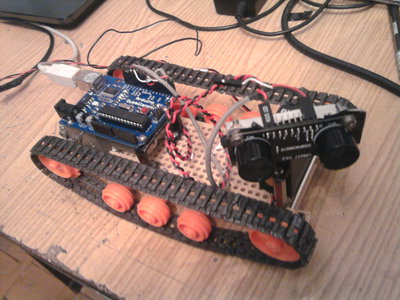
на серве стоит уз-сонор URM 37.
поставил перед собой цель- путь из A в B, как и у вас. Не пользовал другие соноры, но этот работает выше всяких похвал.
На данный момент робот крутит головой , сканируя 180" перед собой (дальность - до 3 м), после сканирования поворачивает голову в сторону большего измерения.
Как ни странно, видит не только "неперпендикулярные" стены, но вообще любые предметы толще карандаша. Работает довольно быстро, 180 измерений занимают чуть больше секунды, при том, что я для наглядности замедлил поворот сервы (7 мкс на каждый градус). Если измерять со скоростью поворота сервы- неточность колеблется в диапазоне +-1 см, что весьма неплохо.
В ближайшее время планирую:
1- усовершенствовать алгоритм сканирования (делю диапазон скана на участки, вычисляю наиболее незагроможденный участок, двигаюсь в этом направлении)
2- поставить ик-дальномеры по бокам, в центре, для более точной навигации
3- "привинтить" к роботу энкодеры, акселерометр, ещё "что-нибудь", пока не определился.
на данный момент создаю свою плату- драйвер на L298N
Хочу задать ВАМ вопросы (и всем старожилам):
1- часто встречаются системы определения образов в виде камера+кпк, камера+планшетник, ноутбук и т.д.
Если диаграмму сканирования представить в виде массива чисел, с помощью некоторой обработки данных массива определить форму встретившегося обьекта, (выпуклость в виде треугольника, круга, квадрата) - МОЖНО ЛИ создать что-то наподобие системы определения/угадывания местных предметов/образов???
2- нашёл одну книгу про роботов Тимофеев А.В. - Адаптивные робототехнические комплексы (1988)
почитайте то, что на скриншоте (см. вложения).
Когда-то прочитал в "золотом" фонде данного форума про локальную систему позиционирования, основанных на УЗ излучателях и приемнике.
Тут принцип похожий, но на фотодатчиках. Хотелось бы проанализировать с вашей помощью имеющиеся варианты решений, обсудить их слабые и сильные места (форум специально для этого), и что-нибудь создать самому. Условие - отсутствие привязки ко всяким внешним системам типа GPS и т.д., способность вырабатывать собственные решения.
Но это вопрос спорный.
3- Из элементной базы имеется Уз дальномер, ардуино, самодельный контроллер на атмеге 16, несколько серв, шасси, движки.
ЧТО ЕЩЁ необходимо докупать в первую очередь для придания "бонусов" к техническому зрению робота?
Добавлено спустя 10 минут 9 секунд:
система на скриншоте довольно "древняя" но принцип понятен.
А что если построить такой алгоритм:
а) нахожусь в точке А, двигаюсь до какой-нибудь стенки
б) подьехав к стенке пытаюсь угадать ориентиры (по очертаниям)
в) ориентиры есть- go to г) , ориентиров нет- возвращаюсь в точку А и go to а)
г) двигаюсь относительно угаданного ориентира по заложенной в память карте к точке Б
З.Ы. я - начинающий, стаж - всего 2 месяца, поэтому извините за юнощеский максимализм, если что...
на серве стоит уз-сонор URM 37.
поставил перед собой цель- путь из A в B, как и у вас. Не пользовал другие соноры, но этот работает выше всяких похвал.
На данный момент робот крутит головой , сканируя 180" перед собой (дальность - до 3 м), после сканирования поворачивает голову в сторону большего измерения.
Как ни странно, видит не только "неперпендикулярные" стены, но вообще любые предметы толще карандаша. Работает довольно быстро, 180 измерений занимают чуть больше секунды, при том, что я для наглядности замедлил поворот сервы (7 мкс на каждый градус). Если измерять со скоростью поворота сервы- неточность колеблется в диапазоне +-1 см, что весьма неплохо.
В ближайшее время планирую:
1- усовершенствовать алгоритм сканирования (делю диапазон скана на участки, вычисляю наиболее незагроможденный участок, двигаюсь в этом направлении)
2- поставить ик-дальномеры по бокам, в центре, для более точной навигации
3- "привинтить" к роботу энкодеры, акселерометр, ещё "что-нибудь", пока не определился.
на данный момент создаю свою плату- драйвер на L298N
Хочу задать ВАМ вопросы (и всем старожилам):
1- часто встречаются системы определения образов в виде камера+кпк, камера+планшетник, ноутбук и т.д.
Если диаграмму сканирования представить в виде массива чисел, с помощью некоторой обработки данных массива определить форму встретившегося обьекта, (выпуклость в виде треугольника, круга, квадрата) - МОЖНО ЛИ создать что-то наподобие системы определения/угадывания местных предметов/образов???
2- нашёл одну книгу про роботов Тимофеев А.В. - Адаптивные робототехнические комплексы (1988)
почитайте то, что на скриншоте (см. вложения).
Когда-то прочитал в "золотом" фонде данного форума про локальную систему позиционирования, основанных на УЗ излучателях и приемнике.
Тут принцип похожий, но на фотодатчиках. Хотелось бы проанализировать с вашей помощью имеющиеся варианты решений, обсудить их слабые и сильные места (форум специально для этого), и что-нибудь создать самому. Условие - отсутствие привязки ко всяким внешним системам типа GPS и т.д., способность вырабатывать собственные решения.
Но это вопрос спорный.
3- Из элементной базы имеется Уз дальномер, ардуино, самодельный контроллер на атмеге 16, несколько серв, шасси, движки.
ЧТО ЕЩЁ необходимо докупать в первую очередь для придания "бонусов" к техническому зрению робота?
Добавлено спустя 10 минут 9 секунд:
система на скриншоте довольно "древняя" но принцип понятен.
А что если построить такой алгоритм:
а) нахожусь в точке А, двигаюсь до какой-нибудь стенки
б) подьехав к стенке пытаюсь угадать ориентиры (по очертаниям)
в) ориентиры есть- go to г) , ориентиров нет- возвращаюсь в точку А и go to а)
г) двигаюсь относительно угаданного ориентира по заложенной в память карте к точке Б
З.Ы. я - начинающий, стаж - всего 2 месяца, поэтому извините за юнощеский максимализм, если что...
- Вложения
-