 Что его удержит?
Что его удержит?roboforum.ru
Технический форум по робототехнике.
Как не упасть или как "не вылетить в трубу"?
Re: Как не упасть или как "не вылетить в трубу"?
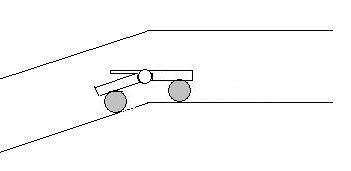
2EdGull: Ты тоже считаешь что на картинке у flyroman'а нарисованный корпус на 4 колёсах не сложится на ровной поверхности? Что его удержит?
Что его удержит?Re: Как не упасть или как "не вылетить в трубу"?
=DeaD= писал(а): Если делать переламывающийся корпус, то надо 6 колёс, иначе он у тебя на ровной поверхности немедля сложится

у мня как раз шесть задумано..на рисунке поленился((
Dead, вот так мож и не сложится и при четырех колесах.
- 3433333.JPG (5.22 КиБ) Просмотров: 3132
сверху упор...для другой части
а если такое случится еще
- 22222.JPG (4.13 КиБ) Просмотров: 2992
тогда уж нужно делать и датчик спереди и шарнир.....а то не дай бог улетит((как на картинке выше
- 3345.JPG (5.4 КиБ) Просмотров: 2996
дык если спереди ролик поставить с переменником, то и ИК не надо, он и пропасть покажет и угол склона, так?
Re: Как не упасть или как "не вылетить в трубу"?
 а в право или в влево изгибы трубы возможны будут? а возможно, что ему возвращаться прийдётся? а то вроде в гору с такой конструкцией никак
а в право или в влево изгибы трубы возможны будут? а возможно, что ему возвращаться прийдётся? а то вроде в гору с такой конструкцией никакRe: Как не упасть или как "не вылетить в трубу"?
а возможно, что ему возвращаться прийдётся?
возвращаться ему в любом случае)))
а то вроде в гору с такой конструкцией никак
ты имеешь ввиду конструкцию с шарниром и опорой сверху?
Я думаю так:
Конструкция на 6 колесах, без шарниров...
спереди и сзади...ролики которые и вверх и вниз , либо дальнометры или т.п.
Добавлено спустя 1 минуту 59 секунд:
а в право или в влево изгибы трубы возможны будут?
счас усну и буду думать)))
я тут уже надумал: а если влево или вправо да еще одновременно и вниз или вверх(((
ушел спать и думать...
Re: Как не упасть или как "не вылетить в трубу"?
не, я про загагулинку, которая не даст изогнуться роботу в обратную сторону
 хотя... она вроде и не будет мешать.
хотя... она вроде и не будет мешать.
кстати мысля пришла, а почему дальномер только внизсмотрящий? можно еще один, который вперёд смотреть будет. при некотором диапазоне дальности срабатывания датчика, диаметров трубы и угла изгиба тож может срабатывать. или можно вперёд два датчка под некоторым углом, будут помогать угол спуска/подъёма определять и определять угол поворота и в какую сторону поворот
хотя... она вроде и не будет мешать. кстати мысля пришла, а почему дальномер только внизсмотрящий? можно еще один, который вперёд смотреть будет. при некотором диапазоне дальности срабатывания датчика, диаметров трубы и угла изгиба тож может срабатывать. или можно вперёд два датчка под некоторым углом, будут помогать угол спуска/подъёма определять и определять угол поворота и в какую сторону поворотRe: Как не упасть или как "не вылетить в трубу"?
на 4х колёсах он не будет ни в жисть так ездить как нарисовано )))
он всегда в любой ситуации будет плоский и пополам никогда не сложится.
надо минимум 3 оси
тогда робот сможет поределять уклон
причём даже не обязательно чтобы корпус был сгибающийся
можно сделать ему подвеску с мягким большим ходом
как тут в одной теме есть шасси 6 колёсное с карданами и ременной передачей
тогда по положению колёс можно будет полностью определять профиль трубы и если уклон грозит стать слишком большим есть шанс успеть отъехать.
а если базу сделать складной и длинной 1.5 диаметра трубы то сгибаясь пополам робот сможет спускаться по вертикальной трубе, как джекичан! опираясь в боковые стенки.
он всегда в любой ситуации будет плоский и пополам никогда не сложится.
надо минимум 3 оси
тогда робот сможет поределять уклон
причём даже не обязательно чтобы корпус был сгибающийся
можно сделать ему подвеску с мягким большим ходом
как тут в одной теме есть шасси 6 колёсное с карданами и ременной передачей
тогда по положению колёс можно будет полностью определять профиль трубы и если уклон грозит стать слишком большим есть шанс успеть отъехать.
а если базу сделать складной и длинной 1.5 диаметра трубы то сгибаясь пополам робот сможет спускаться по вертикальной трубе, как джекичан! опираясь в боковые стенки.
Re: Как не упасть или как "не вылетить в трубу"?
Вот-вот! или пятое колесо впереди:)
Можно сделать много одинаковых звеньев, как у сороконожки.
Если звено может находится в трубе в распор - то проблемы нет с уклонами нет - по принципу дождевого червя - часть корпуса держится неподвижно, остальная перемещается.
Эх, сделаю как нить дождевого на пневматике, с детства покоя не дает:)
Можно сделать много одинаковых звеньев, как у сороконожки.
Если звено может находится в трубе в распор - то проблемы нет с уклонами нет - по принципу дождевого червя - часть корпуса держится неподвижно, остальная перемещается.
Эх, сделаю как нить дождевого на пневматике, с детства покоя не дает:)
Re: Как не упасть или как "не вылетить в трубу"?
Эх, сделаю как нить дождевого на пневматике, с детства покоя не дает:)
сустав и пара электромагнитов

Re: Как не упасть или как "не вылетить в трубу"?
вот этот покруче, ну тоже проходимсть у него не лучше:
дык трубы-то бывают не только 20-50 см... они еще бывают до 2 метров...в диаметре.
Добавлено спустя 13 минут 54 секунды:
Angel71 писал(а): или можно вперёд два датчка под некоторым углом, будут помогать угол спуска/подъёма определять и определять угол поворота и в какую сторону поворот
поподробнее...как?
Re: Как не упасть или как "не вылетить в трубу"?
Лень рисовать, пробую описать.
В фас платформа выглядит как + с колесиками по краям. В профиль как >- поскольку вторая V половинка повернута на 90 градусов. Между половинками платформы шарнир, он же датчик.
Можно сделать Y тележки или просто повернуть оси колес на 90 градусов в 2V для движения по поверхности.
В фас платформа выглядит как + с колесиками по краям. В профиль как >- поскольку вторая V половинка повернута на 90 градусов. Между половинками платформы шарнир, он же датчик.
Можно сделать Y тележки или просто повернуть оси колес на 90 градусов в 2V для движения по поверхности.
Re: Как не упасть или как "не вылетить в трубу"?
А не проще ли дальномер под углом 30 градусов вниз направить? Если труба с большим уклоном - дальномер покажет бесконечность.
Ну а вообще лучше дальномерный сканер сделать в вертикальной плоскости на серве хотя-бы. Тогда картина куда яснее будет.
Ну а вообще лучше дальномерный сканер сделать в вертикальной плоскости на серве хотя-бы. Тогда картина куда яснее будет.
Re: Как не упасть или как "не вылетить в трубу"?
contr писал(а):Эх, сделаю как нить дождевого на пневматике, с детства покоя не дает:)
сустав и пара электромагнитов
не-не-не-не-не!(С)
именно червя, пачка камер типа автомобильных, наполняються, сдуваются в некоторой последовательности:) В двух словах если.
Добавлено спустя 2 минуты 55 секунд:
flyroman писал(а):дык трубы-то бывают не только 20-50 см... они еще бывают до 2 метров...в диаметре.
Угу, как и 1 см диаметром. Трубы диаметром 10м и 0,5м обслуживаются капельку разными роботами, я так тумаю
Re: Как не упасть или как "не вылетить в трубу"?
flyroman писал(а):Angel71 писал(а): или можно вперёд два датчка под некоторым углом, будут помогать угол спуска/подъёма определять и определять угол поворота и в какую сторону поворот
поподробнее...как?
буквой V
но чтот под утро мне эта идея уже не очень нравиться. слушай, а может действительно подумать о варианте с вервами. две сервы и один или два дальномера? данные намного легче получишь при прочих равных условиях, да и более детальная информация будет. про змеюк: WowWee Roboboa http://www.romaxus.com.ua/productID_1556.html
про змеюк: WowWee Roboboa http://www.romaxus.com.ua/productID_1556.htmlRe: Как не упасть или как "не вылетить в трубу"?
обычная тележка, любая
обычный переменный резистор с лапкой, пружинкой и колесиком
Вот и весь датчик
зы. А змеюка прикольная
обычный переменный резистор с лапкой, пружинкой и колесиком
Вот и весь датчик
зы. А змеюка прикольная
Re: Как не упасть или как "не вылетить в трубу"?
ктож знает что там в этой трубе..
мб это вобще канализация
шарп он вляпается в чтонить и ослепнет
лапка вобще вариант только по столу кататься.
мб это вобще канализация
шарп он вляпается в чтонить и ослепнет
лапка вобще вариант только по столу кататься.