Добрый день.
Думаю, что данный раздел наиболее подходит для этой темы.
Есть следующая задача:
Нужно управлять 6 бк моторами в том же режиме, что используется для коптерных подвесов или в головке операторского крана.
Обратная связь осуществляется за счет высокоточных энкодеров (1024+).
Соответственно, нужно иметь возможность поворачивать любой из 6ти моторов на заданный угол. Либо непрерывно вращать с небольшой скоростью.
Возможно использование любой из существующих плат для разработчиков в качестве основы, также готовы рассмотреть вариант с разработкой собственной платы для этой задачи.
Моторы, энкодеры и требуемые материалы предоставим.
Пожалуйста, если кто-то заинтересован, напишите мне в личку с указанием стоимости работы (без учета стоимости компонентов).
roboforum.ru
Технический форум по робототехнике.
[ЗАКАЗ] Разработка платы для управления бк моторами.
 [ЗАКАЗ] Разработка платы для управления бк моторами.
[ЗАКАЗ] Разработка платы для управления бк моторами.
Последний раз редактировалось Noob_123 19 сен 2014, 18:21, всего редактировалось 1 раз.
Re: [ЗАКАЗ] Разработка платы для управления бк моторами.
так напиши что надо то?
то что ты просишь это стандартный коптер.
просто купить в магазине готовый коптер, с моторами, контроллерами и платой управления.
то что ты просишь это стандартный коптер.
просто купить в магазине готовый коптер, с моторами, контроллерами и платой управления.
Re: [ЗАКАЗ] Разработка платы для управления бк моторами.
Вы не совсем правильно поняли.
Управлять нужно не как винтами коптера (там все крайне просто и тонны готовых решений), а как подвесом.
То есть бк мотор играет роль сервопривода(или шаговика,если угодно) за счет использования специальной платы управления, как это реализовано в коптерных подвесах и головке операторского крана.
Соответственно, нужно иметь возможность повернуть любой из этих моторов на строго заданный угол(данные получаются с энкодеров).
Сейчас поправлю главный пост.
Управлять нужно не как винтами коптера (там все крайне просто и тонны готовых решений), а как подвесом.
То есть бк мотор играет роль сервопривода(или шаговика,если угодно) за счет использования специальной платы управления, как это реализовано в коптерных подвесах и головке операторского крана.
Соответственно, нужно иметь возможность повернуть любой из этих моторов на строго заданный угол(данные получаются с энкодеров).
Сейчас поправлю главный пост.
Re: [ЗАКАЗ] Разработка платы для управления бк моторами.
манипулятор делаете?
Re: [ЗАКАЗ] Разработка платы для управления бк моторами.
нет)
По определенным причинам я не могу сказать для чего это надо, но, скажем так, это нужно для очень специфической, узкопрофильной задачи.
Требуется независимое управление 6ю моторами, работающими по тому же принципу, что и в подвесах.
Есть возможность оплатить разработку, поэтому решили найти человека, способного решить данную задачу, вместо того, чтобы разбираться во всем с нуля.
В том числе возможно подписание договора между физическими лицами на выполнение задачи.
По определенным причинам я не могу сказать для чего это надо, но, скажем так, это нужно для очень специфической, узкопрофильной задачи.
Требуется независимое управление 6ю моторами, работающими по тому же принципу, что и в подвесах.
Есть возможность оплатить разработку, поэтому решили найти человека, способного решить данную задачу, вместо того, чтобы разбираться во всем с нуля.
В том числе возможно подписание договора между физическими лицами на выполнение задачи.
Re: [ЗАКАЗ] Разработка платы для управления бк моторами.
На какой скорости это будет все работать, как будут подаваться задания управления? Какие моторы будут использоваться? Требования к надежности, резервирование, уровень безопасности, программный сторожевой таймер, память?
Все это надо знать, чтобы ориентироваться в стоимости устройства и платы.
Все это надо знать, чтобы ориентироваться в стоимости устройства и платы.
Re: [ЗАКАЗ] Разработка платы для управления бк моторами.
Не требуется создание промышленного образца или даже прототипа для какого-то производства.
Требуется создать один экземпляр(именно поэтому вариант с использованием любой готовой платы для разработчиков был бы оптимален).
Моторы -стандартные моторы для подвесов.
Энкодеры - оптические, с разрешением 1024+
"Требования к надежности, резервирование, уровень безопасности, программный сторожевой таймер, память?" - не требуется, фактически нужно кустарное решение.
Управление с ПК, на него же должно быть возможным записывать данные с энкодеров.
Требуется создать один экземпляр(именно поэтому вариант с использованием любой готовой платы для разработчиков был бы оптимален).
Моторы -стандартные моторы для подвесов.
Энкодеры - оптические, с разрешением 1024+
"Требования к надежности, резервирование, уровень безопасности, программный сторожевой таймер, память?" - не требуется, фактически нужно кустарное решение.
Управление с ПК, на него же должно быть возможным записывать данные с энкодеров.
Re: [ЗАКАЗ] Разработка платы для управления бк моторами.
Noob_123 писал(а):Не требуется создание промышленного образца или даже прототипа для какого-то производства.
Требуется создать один экземпляр(именно поэтому вариант с использованием любой готовой платы для разработчиков был бы оптимален).
Я делал контроллер двух бесколлекторников ( http://electrotransport.ru/ussr/index.p ... 5961;image ) . И могу сделать и под вашу задачу. Но весь вопрос в том, что даже для одного экземпляра необходимо провести весь цикл разаработки (в моем случае адаптации существующего контроллера), а это не такое дешевое дело. Наверное, даже и цену называть смысла нет. Неужели ничего готового подобрать не получается?
Re: [ЗАКАЗ] Разработка платы для управления бк моторами.
vvk писал(а):Я делал контроллер двух бесколлекторников ( http://electrotransport.ru/ussr/index.p ... 5961;image ) . И могу сделать и под вашу задачу. Но весь вопрос в том, что даже для одного экземпляра необходимо провести весь цикл разаработки (в моем случае адаптации существующего контроллера), а это не такое дешевое дело. Наверное, даже и цену называть смысла нет. Неужели ничего готового подобрать не получается?
Ни одно готовое решение не может работать одновременно с 6 моторами, к сожалению.
Поэтому и создана эта тема.
Если кто-то может решить этот вопрос любым методом (можно использовать любые готовые решения в любых компоновках, например, 2 open-source контроллера на 3 мотора каждый и stm32, к примеру, для управления ими), то буду рад выслушать предложения со стоимостью работы.
Открыт для любых предложений)
Re: [ЗАКАЗ] Разработка платы для управления бк моторами.
Noob_123 писал(а):vvk писал(а):Открыт для любых предложений)
Ок, написал в личку
Re: [ЗАКАЗ] Разработка платы для управления бк моторами.
Никто тебе не сделает bldc с 1024+, говорю как доктор 
Лужу, паяю, перешиваю любые контроллеры bldc,опускаем на землю всех тут:
http://roboforum.ru/forum104/topic13195.html
Лужу, паяю, перешиваю любые контроллеры bldc,опускаем на землю всех тут:
http://roboforum.ru/forum104/topic13195.html
Re: [ЗАКАЗ] Разработка платы для управления бк моторами.
Рекомендую взять 6 сервоприводов промышленных с контроллерами и с энкодерами. Останется только плату управления ими замутить.
Re: [ЗАКАЗ] Разработка платы для управления бк моторами.
Dmitry__ писал(а):Никто тебе не сделает bldc с 1024+, говорю как доктор
Лужу, паяю, перешиваю любые контроллеры bldc,опускаем на землю всех тут:
http://roboforum.ru/forum104/topic13195.html
Хм. Читал эту тему, в целом, после прочтения(ну, скорее просматривания, 41 страница все таки) и решили искать кого-то, а не разбираться самим.
Не очень понимаю в чем проблема с абсолютными энкодерами высокого разрешения? Какая разница что использовать для обратной связи - плату с гирой и акселем или энкодеры?
avr123.nm.ru писал(а):Рекомендую взять 6 сервоприводов промышленных с контроллерами и с энкодерами. Останется только плату управления ими замутить.
А можно ссылку, пожалуйста, а то не смог найти сайтов, где ценник указан.
И что у них с шумностью? До этого игрался с модельными сервами, так они шумные очень, заразы.
Re: [ЗАКАЗ] Разработка платы для управления бк моторами.
имхо очевидная ссылка www.servo-privod.ruNoob_123 писал(а): А можно ссылку, пожалуйста, а то не смог найти сайтов,

Re: [ЗАКАЗ] Разработка платы для управления бк моторами.
avr123.nm.ru писал(а):имхо очевидная ссылка http://www.servo-privod.ruNoob_123 писал(а): А можно ссылку, пожалуйста, а то не смог найти сайтов,
Благодарю, зарегистрировался там. Но цен там не нашел, вы знаете порядок цен или над им писать и спрашивать про каждую модель в отдельности?
Добавлено спустя 2 часа 42 минуты 26 секунд:
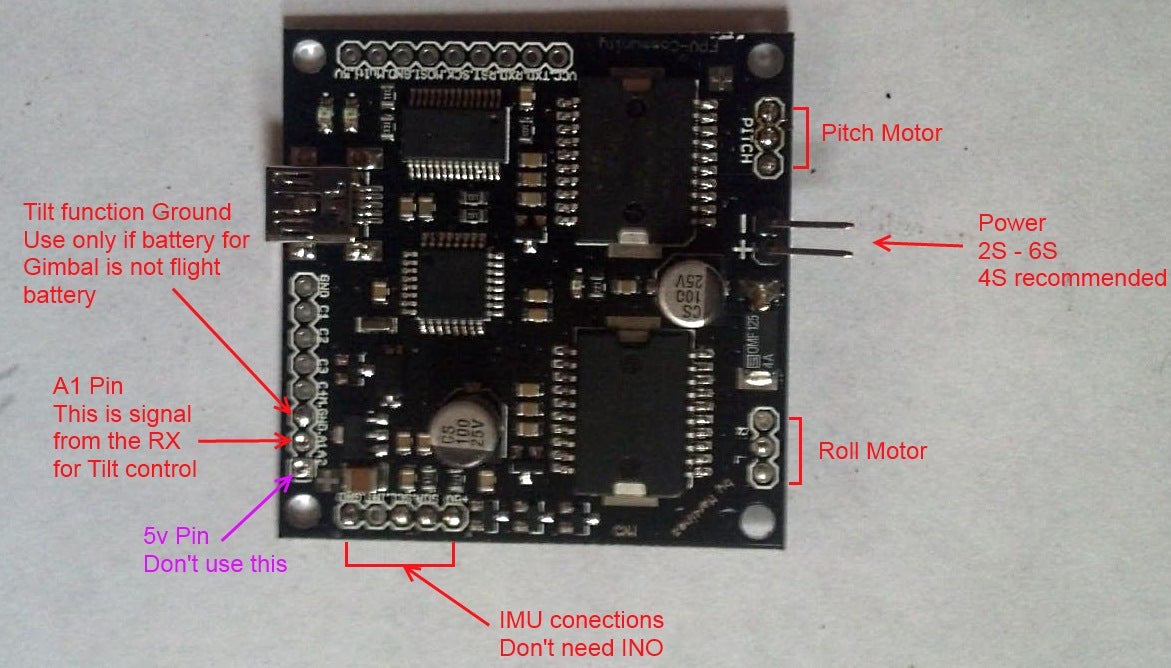
Как вариант - вот open source решение, используещее IMU http://www.rcgroups.com/forums/showthread.php?t=1901828,
возможно ли ему скормить данные с энкодеров с тем же i2c интерфейсом, что использует imu? И, соответственно, использовать несколько подобных плат, немножко изменив программную часть?
Последний раз редактировалось Noob_123 20 сен 2014, 20:51, всего редактировалось 1 раз.