| |
roboforum.ruТехнический форум по робототехнике. |
|
Про USB
Сообщений: 65
• Страница 3 из 5 • 1, 2, 3, 4, 5
-

EdGull - Сообщения: 10211
- Зарегистрирован: 28 дек 2004, 20:33
- Откуда: Тольятти
- Skype: Ed_Gull
- прог. языки: Bascom AVR Basic
- ФИО: Гуль Эдуард Викторович
Re: Про USB
![]() Master » 23 окт 2007, 13:28
Master » 23 окт 2007, 13:28
Я думал там можно будет зашить что-то типа ЧПУстанок и это будет видно как устройство. Ну или что то типа этого. Я еще не до конца разобрался.
-

Master - Сообщения: 4468
- Зарегистрирован: 21 дек 2006, 19:56
- Откуда: Украина, г.Одесса
- прог. языки: Delphi и С
Re: Про USB
![]() Myp » 23 окт 2007, 17:12
Myp » 23 окт 2007, 17:12
ну ты конфиг драйвера подправь и будет тебе хоть коврик для мышки написано хоть пульт управления баллистической ракетой
id всякие устройства там вроде низя менять? в прошивке микры самой
id всякие устройства там вроде низя менять? в прошивке микры самой
-

Myp - скрытый хозяин вселенной :)
- Сообщения: 18018
- Зарегистрирован: 18 сен 2006, 12:26
- Откуда: Тверь по прозвищу Дверь
- прог. языки: псевдокод =) сила в алгоритме!
- ФИО: глубокоуважаемый Фёдор Анатольевич
Re: Про USB
![]() Master » 23 окт 2007, 22:27
Master » 23 окт 2007, 22:27
Myp писал(а):ну ты конфиг драйвера подправь и будет тебе хоть коврик для мышки написано хоть пульт управления баллистической ракетой
id всякие устройства там вроде низя менять? в прошивке микры самой
В EEPROM мона минять VID и PID короче вот скрин.
- Вложения
-
-
Master - Сообщения: 4468
- Зарегистрирован: 21 дек 2006, 19:56
- Откуда: Украина, г.Одесса
- прог. языки: Delphi и С
Re: Про USB
![]() Master » 01 ноя 2007, 00:43
Master » 01 ноя 2007, 00:43
Вопщем продолжаю пытаться работать с USB.
Устройство на FT232BM успешно собранное и опробованное подключаю к Mega16 и не работает. Должно получать и отсылать обратно. putchar(getchar());
Если МК вынуть и закоротить в панельке RxD и TxD работает номана. Ставлю МК данные в порт шлю диодик мигает, а обратно МК не шлет. Вот плата и проект.
Устройство на FT232BM успешно собранное и опробованное подключаю к Mega16 и не работает. Должно получать и отсылать обратно. putchar(getchar());
Если МК вынуть и закоротить в панельке RxD и TxD работает номана. Ставлю МК данные в порт шлю диодик мигает, а обратно МК не шлет. Вот плата и проект.
- Код: Выделить всё • Развернуть
#include <mega16.h>
#define RXB8 1
#define TXB8 0
#define UPE 2
#define OVR 3
#define FE 4
#define UDRE 5
#define RXC 7
#define FRAMING_ERROR (1<<FE)
#define PARITY_ERROR (1<<UPE)
#define DATA_OVERRUN (1<<OVR)
#define DATA_REGISTER_EMPTY (1<<UDRE)
#define RX_COMPLETE (1<<RXC)
// USART Receiver buffer
#define RX_BUFFER_SIZE 100
char rx_buffer[RX_BUFFER_SIZE];
#if RX_BUFFER_SIZE<256
unsigned char rx_wr_index,rx_rd_index,rx_counter;
#else
unsigned int rx_wr_index,rx_rd_index,rx_counter;
#endif
// This flag is set on USART Receiver buffer overflow
bit rx_buffer_overflow;
// USART Receiver interrupt service routine
interrupt [USART_RXC] void usart_rx_isr(void)
{
char status,data;
status=UCSRA;
data=UDR;
if ((status & (FRAMING_ERROR | PARITY_ERROR | DATA_OVERRUN))==0)
{
rx_buffer[rx_wr_index]=data;
if (++rx_wr_index == RX_BUFFER_SIZE) rx_wr_index=0;
if (++rx_counter == RX_BUFFER_SIZE)
{
rx_counter=0;
rx_buffer_overflow=1;
};
};
}
#ifndef _DEBUG_TERMINAL_IO_
// Get a character from the USART Receiver buffer
#define _ALTERNATE_GETCHAR_
#pragma used+
char getchar(void)
{
char data;
while (rx_counter==0);
data=rx_buffer[rx_rd_index];
if (++rx_rd_index == RX_BUFFER_SIZE) rx_rd_index=0;
#asm("cli")
--rx_counter;
#asm("sei")
return data;
}
#pragma used-
#endif
// Standard Input/Output functions
#include <stdio.h>
#include <delay.h>
// Declare your global variables here
void main(void)
{
// Declare your local variables here
// Input/Output Ports initialization
// Port A initialization
// Func7=Out Func6=Out Func5=Out Func4=Out Func3=Out Func2=Out Func1=Out Func0=Out
// State7=0 State6=0 State5=0 State4=0 State3=0 State2=0 State1=0 State0=0
PORTA=0x00;
DDRA=0xFF;
// Port B initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=P State6=P State5=P State4=P State3=P State2=P State1=P State0=P
PORTB=0xFF;
DDRB=0x00;
// Port C initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=P State6=P State5=P State4=P State3=P State2=P State1=P State0=P
PORTC=0xFF;
DDRC=0x00;
// Port D initialization
// Func7=In Func6=In Func5=In Func4=In Func3=In Func2=In Func1=In Func0=In
// State7=P State6=P State5=P State4=P State3=P State2=P State1=P State0=P
PORTD=0xFF;
DDRD=0x00;
// Timer/Counter 0 initialization
// Clock source: System Clock
// Clock value: Timer 0 Stopped
// Mode: Normal top=FFh
// OC0 output: Disconnected
TCCR0=0x00;
TCNT0=0x00;
OCR0=0x00;
// Timer/Counter 1 initialization
// Clock source: System Clock
// Clock value: Timer 1 Stopped
// Mode: Normal top=FFFFh
// OC1A output: Discon.
// OC1B output: Discon.
// Noise Canceler: Off
// Input Capture on Falling Edge
// Timer 1 Overflow Interrupt: Off
// Input Capture Interrupt: Off
// Compare A Match Interrupt: Off
// Compare B Match Interrupt: Off
TCCR1A=0x00;
TCCR1B=0x00;
TCNT1H=0x00;
TCNT1L=0x00;
ICR1H=0x00;
ICR1L=0x00;
OCR1AH=0x00;
OCR1AL=0x00;
OCR1BH=0x00;
OCR1BL=0x00;
// Timer/Counter 2 initialization
// Clock source: System Clock
// Clock value: Timer 2 Stopped
// Mode: Normal top=FFh
// OC2 output: Disconnected
ASSR=0x00;
TCCR2=0x00;
TCNT2=0x00;
OCR2=0x00;
// External Interrupt(s) initialization
// INT0: Off
// INT1: Off
// INT2: Off
MCUCR=0x00;
MCUCSR=0x00;
// Timer(s)/Counter(s) Interrupt(s) initialization
TIMSK=0x00;
// USART initialization
// Communication Parameters: 8 Data, 1 Stop, No Parity
// USART Receiver: On
// USART Transmitter: On
// USART Mode: Asynchronous
// USART Baud rate: 19200
UCSRA=0x00;
UCSRB=0x98;
UCSRC=0x86;
UBRRH=0x00;
UBRRL=0x33;
// Analog Comparator initialization
// Analog Comparator: Off
// Analog Comparator Input Capture by Timer/Counter 1: Off
ACSR=0x80;
SFIOR=0x00;
// Global enable interrupts
#asm("sei")
while (1)
{
// Place your code here
putchar(getchar());
};
}
- Вложения
-
-
 Led.rar
Led.rar- (60.05 КиБ) Скачиваний: 49
Последний раз редактировалось Master 01 ноя 2007, 08:21, всего редактировалось 1 раз.
-
Master - Сообщения: 4468
- Зарегистрирован: 21 дек 2006, 19:56
- Откуда: Украина, г.Одесса
- прог. языки: Delphi и С
Re: Про USB
![]() Master » 01 ноя 2007, 00:45
Master » 01 ноя 2007, 00:45
Подключаюсь к вновь появившемуся порту у меня СОМ4, скорость выставляю 19200, т.е. такую же как и в прошивке.
-
Master - Сообщения: 4468
- Зарегистрирован: 21 дек 2006, 19:56
- Откуда: Украина, г.Одесса
- прог. языки: Delphi и С
Re: Про USB
![]() Myp » 01 ноя 2007, 01:08
Myp » 01 ноя 2007, 01:08
ну что могу тебе сказать...
потыкай светодиодом в ногу Tx контроллера когда он чёто в теории должен посылать
если моргает что начит проблема гдето там..
а если не моргает то проблема гдето чисто в самом мк с программой или конфигурацией
потыкай светодиодом в ногу Tx контроллера когда он чёто в теории должен посылать
если моргает что начит проблема гдето там..
а если не моргает то проблема гдето чисто в самом мк с программой или конфигурацией
-
Myp - скрытый хозяин вселенной :)
- Сообщения: 18018
- Зарегистрирован: 18 сен 2006, 12:26
- Откуда: Тверь по прозвищу Дверь
- прог. языки: псевдокод =) сила в алгоритме!
- ФИО: глубокоуважаемый Фёдор Анатольевич
Re: Про USB
![]() Master » 01 ноя 2007, 08:15
Master » 01 ноя 2007, 08:15
Нашел, ножки от FT232 должны идти FT232_RxD -> МК_TxD, FT232_TxD -> МК_RxD, а у меня наобоорот.
-
Master - Сообщения: 4468
- Зарегистрирован: 21 дек 2006, 19:56
- Откуда: Украина, г.Одесса
- прог. языки: Delphi и С
Re: Про USB
![]() Master » 09 май 2008, 23:24
Master » 09 май 2008, 23:24
Я смотрю на форуме появился человек заинтересовавшийся управлением девайсами от ЮСБ, поэтому выклдываю сюда свой проект управления свтодиодами от ЮСБ.
Для работы на Делфи с СОМ портом использую библиотеку BComPort.
Для работы устройства нужно выбрать нужный порт и выставить скорость 19200.
Добавлено спустя 1 минуту 36 секунд:
1. Плата под FT232BM.
2. Прошивка.
3. Плата с МК, диодами и разъемом под FT232BM.
4. Софт на Делфи.
Добавлено спустя 15 минут 59 секунд:
ВНИМАНИЕ, проект делался давно, поэтому все нужно проверить прежде чем подключать.
Для работы на Делфи с СОМ портом использую библиотеку BComPort.
Для работы устройства нужно выбрать нужный порт и выставить скорость 19200.
Добавлено спустя 1 минуту 36 секунд:
1. Плата под FT232BM.
2. Прошивка.
3. Плата с МК, диодами и разъемом под FT232BM.
4. Софт на Делфи.
Добавлено спустя 15 минут 59 секунд:
ВНИМАНИЕ, проект делался давно, поэтому все нужно проверить прежде чем подключать.
- Вложения
-
- FT232BM EEPROM.rar
- (12.48 КиБ) Скачиваний: 43
-
- .rar
- (41.34 КиБ) Скачиваний: 47
-
- с под МК.rar
- (31.13 КиБ) Скачиваний: 44
-
- SOFT.rar
- (198.36 КиБ) Скачиваний: 49
-
Master - Сообщения: 4468
- Зарегистрирован: 21 дек 2006, 19:56
- Откуда: Украина, г.Одесса
- прог. языки: Delphi и С
Re: Про USB
![]() FireFly » 10 май 2008, 00:00
FireFly » 10 май 2008, 00:00
Добавлю свой модулек конвертера USB UART 
тока он на FT232RL - обвязки почти нет, еепром не нужен ибо встроенный и внешнего кварца то же не надо, тока вот мелковата микруха - сложно паять без опыта
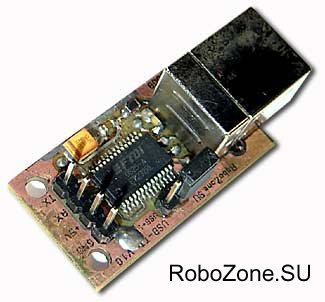
По сцылке схема и плата + тестовая простецкая прошивка на BASCOM AVR
тока он на FT232RL - обвязки почти нет, еепром не нужен ибо встроенный и внешнего кварца то же не надо, тока вот мелковата микруха - сложно паять без опыта
По сцылке схема и плата + тестовая простецкая прошивка на BASCOM AVR
-

FireFly - Сообщения: 1576
- Зарегистрирован: 19 июн 2005, 18:27
- Откуда: Камышин
Re: Про USB
![]() D1mcon » 16 май 2009, 23:28
D1mcon » 16 май 2009, 23:28
Интересно, пусть есть коммуникатор (windows mobile), у него mini usb, возможно ли при помощи FT232 соединить с МК. И будет ли на нем создан виртуальный ком-порт? 
Какие у кого будут соображения на этот счет?
Какие у кого будут соображения на этот счет?
-

D1mcon - Сообщения: 700
- Зарегистрирован: 08 фев 2009, 10:13
- Откуда: Воротынск
- прог. языки: C,C++,C#,Java
- ФИО: Дмитрий
Re: Про USB
![]() MiBBiM » 16 май 2009, 23:30
MiBBiM » 16 май 2009, 23:30
если на кмк юсб хост, то работать будет однозначно. проверено многолетним опытом
опытом-

MiBBiM - Сообщения: 1866
- Зарегистрирован: 29 окт 2007, 18:11
- Откуда: Пермь
- прог. языки: Brainfuck/Basic/Delphi/C++/Lisp/x86asm/JavaScript
Re: Про USB
![]() D1mcon » 16 май 2009, 23:47
D1mcon » 16 май 2009, 23:47
А если нет?
На чем проверялось?
MiBBiM писал(а):если на кмк юсб хост, то работать будет однозначно. проверено многолетним
На чем проверялось?
-
D1mcon - Сообщения: 700
- Зарегистрирован: 08 фев 2009, 10:13
- Откуда: Воротынск
- прог. языки: C,C++,C#,Java
- ФИО: Дмитрий
Re: Про USB
![]() MiBBiM » 16 май 2009, 23:49
MiBBiM » 16 май 2009, 23:49
ищи на форуме по ключевику acer n311 - что найдешь, то всё, в основном, моё.
на нет и суда нет
на нет и суда нет
-
MiBBiM - Сообщения: 1866
- Зарегистрирован: 29 окт 2007, 18:11
- Откуда: Пермь
- прог. языки: Brainfuck/Basic/Delphi/C++/Lisp/x86asm/JavaScript
Re: Про USB
![]() RST » 21 июн 2009, 12:24
RST » 21 июн 2009, 12:24
Myp писал(а):... если оч охото мона напиcать прогу для встроенного мк чтоб остальными ногами светиками моргал =)
Master писал(а):Я смотрю на форуме появился человек заинтересовавшийся управлением девайсами от ЮСБ, поэтому выклдываю сюда свой проект управления свтодиодами от ЮСБ.
2 Мур & Master
Салам aлейкум о источники мудрости !!!
- мне срочно необходимо лампами Алладина поморгать
 (т.е. своего рода програмная оболочка под управление 12-каналов (вкл/выкл) необходимо с определенным интервалом записанным на таймлинии в PC управление через ЮСБ и желательно под музыку
(т.е. своего рода програмная оболочка под управление 12-каналов (вкл/выкл) необходимо с определенным интервалом записанным на таймлинии в PC управление через ЮСБ и желательно под музыку 
- а так-же не мешало-бы и самому "мудрости заморской" поучится "управлениe девайсами от ЮСБ"

- с чего начинать посоветуете? - что можно прикупить в магазине радиодеталей под поставленную задачку ?
- за полученые знания испытанными на практике, отборным серебром готов отблагодарить

P.S. в скриптах вроде немного понимаю (есть опыт работы с ависинсом) но вот что для чего...(что в какой программе писать и что будет на выходах микросхем) мне пока не понятно
-

RST - Сообщения: 5
- Зарегистрирован: 06 июн 2009, 03:18
- Откуда: Moscow
Сообщений: 65
• Страница 3 из 5 • 1, 2, 3, 4, 5
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 0