Я фигею, дорогая редакция...
Ладно, вопрос на засыпку. Как работают инфракрасные термометры и пирометры?
roboforum.ru
Технический форум по робототехнике.
Реакция на живой объект ПИР-элементом
Re: Реакция на живой объект
а чорд их знает... 
я както пользовался, наводишь пистолет куда надо и он те цифирками показывает температуру
а датчики движения на пиродатчиках срабатывают вааще на любую вибрацию, стукнул по нему ион стал фиолетовый он сработал
просвети уж нас непонятливых как оно в движении определяет температуру?
я както пользовался, наводишь пистолет куда надо и он те цифирками показывает температуру
а датчики движения на пиродатчиках срабатывают вааще на любую вибрацию, стукнул по нему и
просвети уж нас непонятливых как оно в движении определяет температуру?
Re: Реакция на живой объект
Вот выдержки из разных статей.
Человек излучает инфракрасные волны в диапазоне от 2,5 до 25 мкм с пиком излучения на длине волны 9,3-10 мкм.
Датчики с характеристикой 1 предназначены для обнаружения пламени, 2 и 3 — наилучшим образом подходят для фиксации движения человека. Характеристика 4 оптимальна для использования в дистанционных измерителях температуры.
По поводу "реакции на горячий чайник", батарею etc. Отлично определять живой объект именно в момент, когда робаД неподвижен, а объект как-раз - наоборот.
Человек излучает инфракрасные волны в диапазоне от 2,5 до 25 мкм с пиком излучения на длине волны 9,3-10 мкм.
Датчики с характеристикой 1 предназначены для обнаружения пламени, 2 и 3 — наилучшим образом подходят для фиксации движения человека. Характеристика 4 оптимальна для использования в дистанционных измерителях температуры.
По поводу "реакции на горячий чайник", батарею etc. Отлично определять живой объект именно в момент, когда робаД неподвижен, а объект как-раз - наоборот.
- Вложения
-
Re: Реакция на живой объект
тщиорт...
лень мне много буков писать.
лень мне много буков писать.
Re: Реакция на живой объект
hudbrog писал(а):Просто так - не интересно.. а вот если внести в спор какой-то элемент мотивации, то почему бы и нет =)
ок.
дам 1000р. если у тебя получится пиром следить за челом в помещении.
только надо сперва уточнить модель датчика, я проверял пир-элементы применяемые в датчиках движения
Re: Реакция на живой объект
2EdGull:
ты проиграл
ПИР и так следит за человеком в помещении - есть человек или нет человека ...
...
Срочно измени условие задачи, добавь что-то вроде "отслеживать перемещение человека в помещении"...
Только ПИР для подвижного робота не годится по двум причинам:
У ПИРа большая инерция - мы боремся за мкс, а тут на много порядков больше. И главное ПИР на неподвижном "роботе" продаётся за копейки, чего его строить то? А на подвижном это - выдавать желаемое за действительное.
ты проиграл
ПИР и так следит за человеком в помещении - есть человек или нет человека
...Срочно измени условие задачи, добавь что-то вроде "отслеживать перемещение человека в помещении"...
Только ПИР для подвижного робота не годится по двум причинам:
У ПИРа большая инерция - мы боремся за мкс, а тут на много порядков больше. И главное ПИР на неподвижном "роботе" продаётся за копейки, чего его строить то? А на подвижном это - выдавать желаемое за действительное.
Re: Реакция на живой объект
Vovan писал(а):2EdGull:ты проиграл ПИР и так следит за человеком в помещении - есть человек или нет человека ...
ага... щаз!...
может еще с тобой поспорить что если я не буду двигаться, то датчик меня не увидит?

ЗЫ ну вы чё в самом деле?..
Re: Реакция на живой объект
Да я не об этом, условие задачи проигрышное... По любому датчик на ПИРе определит есть чел или нет чела... Т.е. он следит за этим, а значит условие задания выполнено любым покупным датчиком движения или присутствия. А вот чтобы отслеживать перемещение человека, т.е. менять направление фронта в сторону человека, на ПИРе - не выйдет...
РАзница однако
РАзница однако
Re: Реакция на живой объект
2Vovan: А ты точно отличаешь "датчик определения состояния" от "датчика определения изменения состояния" ?
Т.е., скажем, некоторые змеи не видят человека, они видят движение. Поэтому если человек войдёт в комнату где сидит такая змея - она его заметит. А вот если змея вползёт в комнату где неподвижно лежит человек - она его не заметит.
Т.е., скажем, некоторые змеи не видят человека, они видят движение. Поэтому если человек войдёт в комнату где сидит такая змея - она его заметит. А вот если змея вползёт в комнату где неподвижно лежит человек - она его не заметит.
Re: Реакция на живой объект
EdGull, Vovan писал(а):может еще с тобой поспорить что если я не буду двигаться, то датчик меня не увидит?
А вот чтобы отслеживать перемещение человека, т.е. менять направление фронта в сторону человека, на ПИРе - не выйдет
да вот хрен его знает...
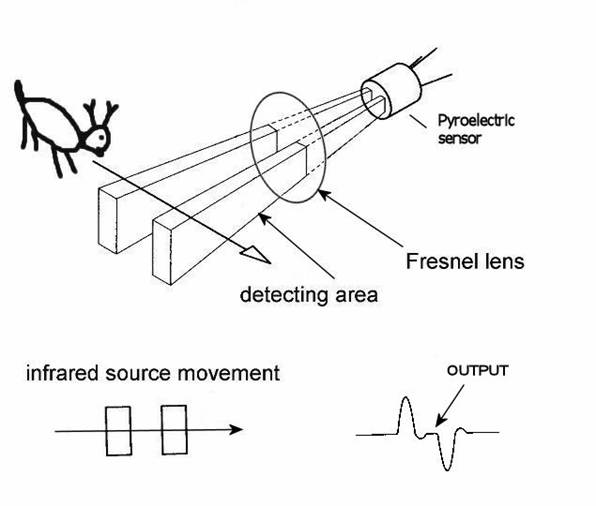
но : если он при вращении сенсора видит всплеск одним глазом и потом видит всплеск вторым глазом (или одной половиной глаза и другой половиной глаза), то человек где то посередине ... (см. картинку внизу)
а "есть" человек или "нет" PIR , имхо, не определяет (хоть я и не копался детально), как правило "модули" определяют "движение тёплого пятна", т.е. если _абсолютно_ не двигаться и включить - не определяет.
не сработает так же если двигаться ОЧЕНЬ медленно. зависит от схемотехники конкретного модуля.
кстати, а с "обычными" линзами оно работает ?
Последний раз редактировалось nest 02 дек 2008, 22:51, всего редактировалось 1 раз.
Re: Реакция на живой объект
Ну наконец-то... золотые слова...
DeaD а теперь обясни им что будет видеть змея когда ее на курусельку посадят...
Добавлено спустя 10 минут 46 секунд:
да вот хренушки...
у пира если его крутить будут сработки внезависимости, будет там человек или нет.
DeaD а теперь обясни им что будет видеть змея когда ее на курусельку посадят...
Добавлено спустя 10 минут 46 секунд:
nest писал(а):да вот хрен его знает...но : если он при вращении сенсора видит всплеск одним глазом и потом видит всплеск вторым глазом (или одной половиной глаза и другой половиной глаза), то человек где то посередине ...
да вот хренушки...
у пира если его крутить будут сработки внезависимости, будет там человек или нет.
Re: Реакция на живой объект
Вы точно уверены в этом? Смею не согласиться, здесь тонкая разница: змея видит человека неподвижного, но НЕ РЕАГИРУЕТ. И подвижного видит и РЕАГИРУЕТ. Ну конечно, возможно, не все змеи... К примеру кобра. Она прекрасно видит все возможности рельефа местности, а неподвижный человек как раз и представляет собой рельеф местности, как кочка (если лежит) или как дерево если стоИт...Т.е., скажем, некоторые змеи не видят человека, они видят движение. Поэтому если человек войдёт в комнату где сидит такая змея - она его заметит. А вот если змея вползёт в комнату где неподвижно лежит человек - она его не заметит.
Если же змея слепая (наверное есть такие, не проверял, да и незачем), то тогда и разговора нет.
Датчики: я ж написАл (см.выше) "датчик движения" - естесно реагирует на движение, и "датчик присутствия" - реагирует на изменение объёма, ёмкости, температуры и т.п. их много...
ну дак и я об этом!да вот хренушки...
у пира если его крутить будут сработки внезависимости, будет там человек или нет.
Re: Реакция на живой объект
тогда о чем речь?
здесь обсуждам применение ПИРов на подвижной платформе
или я что-то пропустил?
здесь обсуждам применение ПИРов на подвижной платформе
или я что-то пропустил?
Re: Реакция на живой объект
все смешалось, люди, кони ...
давайте позырим на "PIR датчик" отдельно и на "модуль с PIR датчиком" отдельно.
"PIR датчик" - имхо, имеет на выходных ногах кучу мусора, правильного и не правильного. и (допустим) "срабатывает" _и_ без наличия человека, например доска стола экранирует ИК излучение от более тёплого пола. (глаза змеи "видят" человека)
"модуль с PIR датчиком" - "фильтрует" нужное из мусора от "PIR датчика". (мозг змеи отфильтровывает движимого человека из потока информации с глаз, и не отфильтровывает _недвижимого_)
в общем, термин "рельеф" как нельзя кстати.
а вот термин "срабатывает" применительно к "PIR датчику" - не верный.
кароче, как и везде, ключевое слово "контраст". если он есть - фильтруем. нет контраста - имеем сплошной рельеф.
вопросы ? критика ? : )
давайте позырим на "PIR датчик" отдельно и на "модуль с PIR датчиком" отдельно.
"PIR датчик" - имхо, имеет на выходных ногах кучу мусора, правильного и не правильного. и (допустим) "срабатывает" _и_ без наличия человека, например доска стола экранирует ИК излучение от более тёплого пола. (глаза змеи "видят" человека)
"модуль с PIR датчиком" - "фильтрует" нужное из мусора от "PIR датчика". (мозг змеи отфильтровывает движимого человека из потока информации с глаз, и не отфильтровывает _недвижимого_)
в общем, термин "рельеф" как нельзя кстати.
а вот термин "срабатывает" применительно к "PIR датчику" - не верный.
кароче, как и везде, ключевое слово "контраст". если он есть - фильтруем. нет контраста - имеем сплошной рельеф.
вопросы ? критика ? : )
Последний раз редактировалось nest 02 дек 2008, 23:12, всего редактировалось 1 раз.
Re: Реакция на живой объект
Дак я и говорю: (см. выше)"А на подвижном это - выдавать желаемое за действительное." т.е. нереал.
Я про задачу которую ты поставил и только! А пир на подвижном роботе нонсенс!
ПИР не определит присутствие, он определит движение. Человек не может появиться внезапно, он может либо войти, вползти, влететь и т.д... И ПИР это зафиксирует полюбому, как и действие обратное... Следовательно: твоя задача решена на базе датчика движения.
Ты же, наверное, хотел поставить чувакам задачу подвижным роботом отслеживать подвижного человека. Разве не так?
Я про задачу которую ты поставил и только! А пир на подвижном роботе нонсенс!
ПИР не определит присутствие, он определит движение. Человек не может появиться внезапно, он может либо войти, вползти, влететь и т.д... И ПИР это зафиксирует полюбому, как и действие обратное... Следовательно: твоя задача решена на базе датчика движения.
Ты же, наверное, хотел поставить чувакам задачу подвижным роботом отслеживать подвижного человека. Разве не так?