Технический форум по робототехнике.
blindman » 17 авг 2015, 17:26
Всем привет! Давненько я тут не был. Чото одни принтеры

Обдумываю одну идейку, нужен совет.
Задача: есть перевернытый маятник на оси колеса. Нужно заставить всю конструкцию двигаться, и чтобы маятник не опрокидывался. Двигатель достаточно мощный, но управлять положением вала с высокой точностью невозможно.
Мысль такая - добавить второй двигатель, BLDC. Когда маятник в равновесии, напряжение на двигатель не подается, и он свободно вращается. При отклонении маятника, на обмотки двигателя подается напряжение таким образом, что создаваемый при этот момент возвращал маятник в вертикальное положение.
Собственно вопрос в том, что не понадобится ли для этого двигатель с моментом, который соизмерим с моментом тягового движка? И может ли вообще такая схема работать?
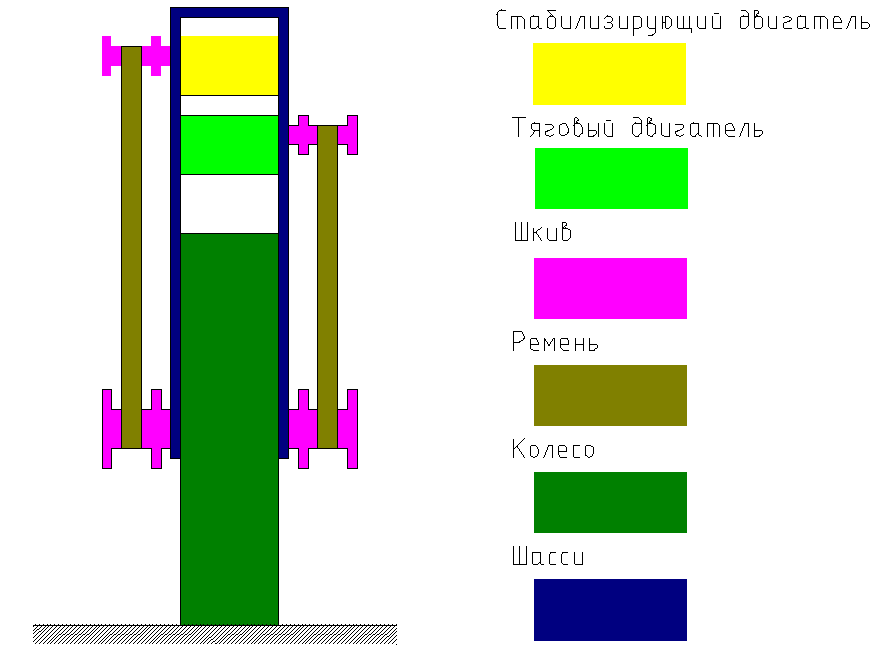
- Вложения
-
 Просмотров: 4078")
dccharacter » 17 авг 2015, 17:30
http://ww1.microchip.com/downloads/en/A ... 00964A.pdfПо-моему то же самое. Единственное, если у тебя на этом маятнике будут датчики висеть, тебе придется как-то учитывать влияние двух движков, т.е. магия посложнее будет
setar » 18 авг 2015, 11:58
Привет! с возвращением 
robovan » 18 авг 2015, 19:17
Тут на форуме есть тема балансируюший скутер, вот там все нюансы таких систем описаны.
blindman » 18 авг 2015, 19:36
Кроме одного. Мне надо, чтобы тягу создавал двигатель, который нельзя использовать для стабилизации, скорость его вращения невозможно достаточно быстро изменить
robovan » 18 авг 2015, 20:44
Тягу? это типа должен быть одноколесный балансирующий мотоцикл?
В таких системах движение идет за счет наклона верхней части в одну из сторон. а потом тяга двигателя должна быть такой, что бы удерживать его в состоянии непрерывного падения за счет вращения колеса. Не думаю что нужно для этого 2 двигателя. Но вам в любом случае виднее.
Добавлено спустя 3 минуты 31 секунду:forum10/topic11922.html?hilit=%D0%B1%D0%B0%D0%BB%D0%B0%D0%BD%D1%81%D0%B8%D1%80%D1%83%D1%8E%D1%89%D0%B8%D0%B9%20%D1%81%D0%BA%D1%83%D1%82%D0%B5%D1%80
dccharacter » 18 авг 2015, 22:09
robovan, ты не догоняешь, чего хочет ТС. Он хочет хвост реализовать, типа как гепарды используют для балансировки во время бега. Т.е. телега едет, хвост балансирует. Ты же ему сегвей предлагаешь запилить очередной.
robovan » 18 авг 2015, 23:22
Не надо мне в таком тоне писать! Сами вы много доганяете? Выбирайте выражения когда пишите.
Последний раз редактировалось
robovan 18 авг 2015, 23:34, всего редактировалось 1 раз.
=DeaD= » 18 авг 2015, 23:31
ИМХО при минимальных требованиях (плавно разгоняемся, плавно тормозим - а для этого как минимум надо иметь точность управляющего воздействия на основной движок) вполне возможно, получится догонять точность управления вспомогательным движком. Но если встанет вопрос о "пинке", от которого маятник должен устоять - может быть просто мощности BLDC не хватит для того, чтобы успеть компенсировать неожиданное воздействие.
PS: С возвращением, и правда, последнее время сплошные 3Д-принтеры
dccharacter » 18 авг 2015, 23:47
robovan писал(а):Не надо мне в таком тоне писать! Сами вы много доганяете? Выбирайте выражения когда пишите.
Обидели мышку
lorry » 19 авг 2015, 01:29
А с чего вы взяли что "Когда маятник в равновесии, напряжение на двигатель не подается", маятник никогда не будет в равновесии, это равновесие должно поддерживаться извне, т.е. напряжение на стабилизирующий двигатель всегда будет подаваться, и система будет постоянно пытаться уравновесить саму себя, но это в общем то нормально, так работают все балансиры, им постоянно приходится бороться с тяготением Земли.
Проблема в другом: на ремне передачи от тягового двигателя на шкив колеса натяжение должно быть достаточным чтобы: с одной стороны обеспечить надежное сцепление ремня со шкивом без проворачивания, а с другой стороны при приложении усилия со стороны стабилизирующего двигателя (который всегда будет включен в каком то из направлений) обеспечить прокручивание шкива относительно ремня (или наоборот) и соответственно притормаживание (или разгон) в узле "тяговый двигатель-шкив колеса". Вы никогда не сможете настроить эти натяжения так, чтобы маятник не опрокидывался. Дело в том, что начальные условия при которых ваша система будет начинать работу будут всегда разные, к этому относится как внутреннее состояние системы (нагрев узлов, насыщенность ремней влагой и пр.), так и внешние условия (температура, влажность, даже атмосферное давление). А из за того, что в моменты включения стабилизирующего двигателя в узле "тяговый двигатель-шкив колеса" у вас будут возникать проворачивания ремня относительно шкива или наоборот шкива относительно ремня (смотря в какую сторону будет включаться стабилизирующий двигатель), узел будет нагреваться, что как следствие приведет быстрому его износу, а самое главное из за нагрева произойдет увеличение трения ремня и шкива, что естественно сразу выведет систему из равновесия и баланса. Т.е. даже если вы сможете первоначально настроить устройство на балансирование, то это продлится не больше чем до того момента как из за трения ремня о шкив, изменится механическое сопротивление между ними, а произойдет это очень быстро.
На практике решить такую проблему можно только с использованием обгонной муфты. Но и здесь сложность в том, что простая обгонная муфта работает только при вращении в одну сторону, вам же нужно и тормозить и разгонять колесо. В любом случае это будет достаточно сложное механическое изделие, которое утяжелит всю конструкцию и усложнит ее изготовление.
dccharacter » 19 авг 2015, 02:08
Angel71 » 19 авг 2015, 03:27
dccharacter, няшная бионика
blindman » 19 авг 2015, 08:41
это типа должен быть одноколесный балансирующий мотоцикл?
Давайте считать, что это так
тяга двигателя должна быть такой, что бы удерживать его в состоянии непрерывного падения за счет вращения колеса. Не думаю что нужно для этого 2 двигателя
С ДВС, например, такое не прокатит
А с чего вы взяли что "Когда маятник в равновесии, напряжение на двигатель не подается", маятник никогда не будет в равновесии, это равновесие должно поддерживаться извне
Ну пусть будет так, сути это не меняет. При переходе маятника через точку равновесия, направление вращения двигателя будет меняться на противоположное. Точнее, не направление вращения, а направление создаваемого этим двигателем момента силы
На практике решить такую проблему можно только с использованием обгонной муфты
Или дифференциала. Которому не свойственно ограничение:
простая обгонная муфта работает только при вращении в одну сторону
То что я нарисовал - как раз и есть дифференциал
Но если встанет вопрос о "пинке", от которого маятник должен устоять - может быть просто мощности BLDC не хватит для того, чтобы успеть компенсировать неожиданное воздействие.
Вот в этом и суть. Я почему и вынес это в вопрос. Если понадобится двигатель слишком мощный - нафига тогда нужен первый движок.
Добавлено спустя 33 минуты 40 секунд:Он хочет хвост реализовать, типа как гепарды используют для балансировки во время бега.
Ну можно и в таком ключе мыслить. Вопрос - как организовать эффективный привод этого "хвоста"
Вот пример реализации
Внутри колеса - балансирующий противовес. Основная проблема - большая масса.
=DeaD= » 19 авг 2015, 09:22
blindman писал(а):Но если встанет вопрос о "пинке", от которого маятник должен устоять - может быть просто мощности BLDC не хватит для того, чтобы успеть компенсировать неожиданное воздействие.
Вот в этом и суть. Я почему и вынес это в вопрос. Если понадобится двигатель слишком мощный - нафига тогда нужен первый движок.
Это неопределенное требование. При любой мощности движков существует такой мощный "пинок", от которого движки не смогут компенсировать импульс.